
基于齿面接触分析的变位行星齿轮啮合刚度计算方法.pdf

霞英****娘子


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于齿面接触分析的变位行星齿轮啮合刚度计算方法.pdf
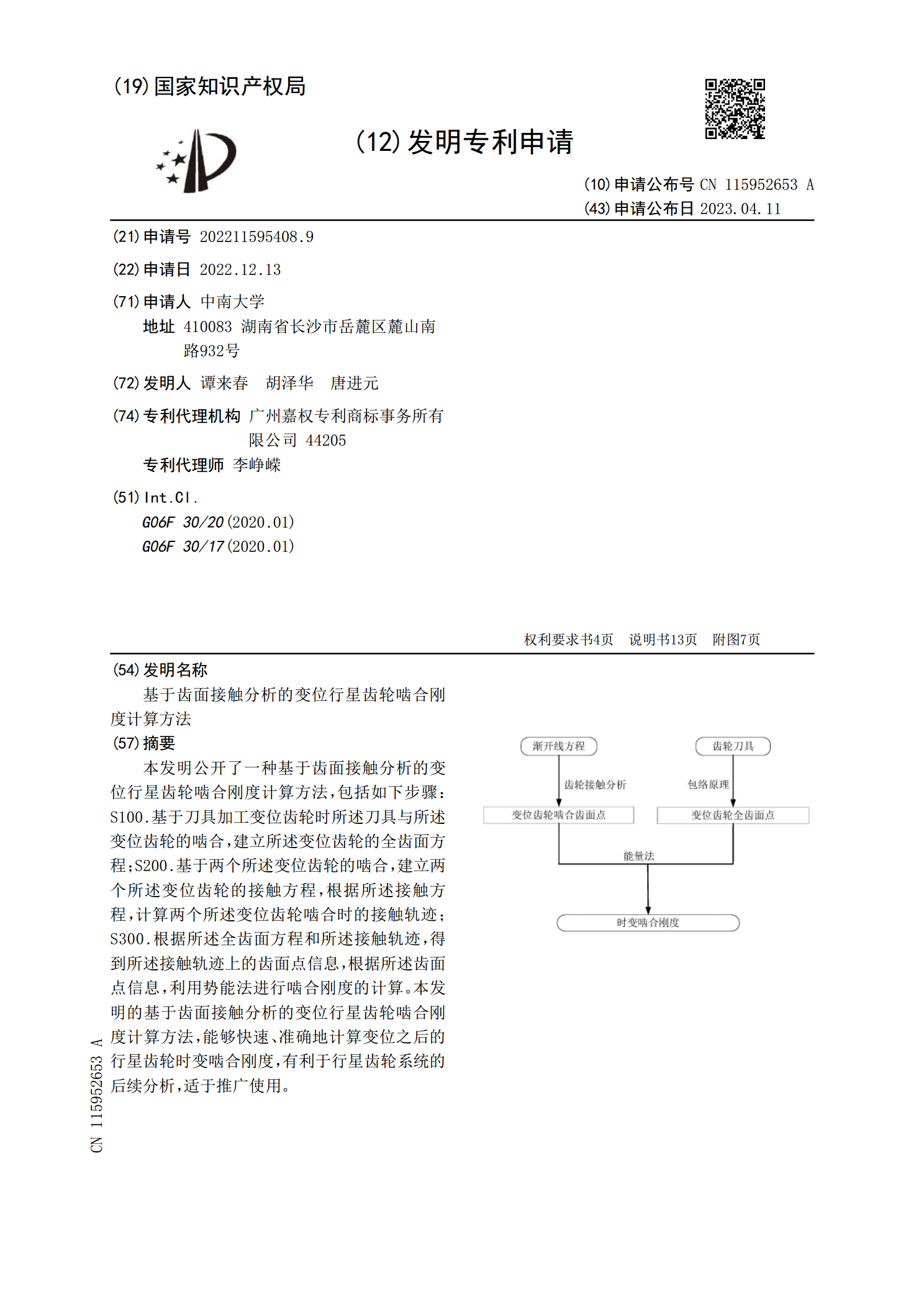
本发明公开了一种基于齿面接触分析的变位行星齿轮啮合刚度计算方法,包括如下步骤:S100.基于刀具加工变位齿轮时所述刀具与所述变位齿轮的啮合,建立所述变位齿轮的全齿面方程;S200.基于两个所述变位齿轮的啮合,建立两个所述变位齿轮的接触方程,根据所述接触方程,计算两个所述变位齿轮啮合时的接触轨迹;S300.根据所述全齿面方程和所述接触轨迹,得到所述接触轨迹上的齿面点信息,根据所述齿面点信息,利用势能法进行啮合刚度的计算。本发明的基于齿面接触分析的变位行星齿轮啮合刚度计算方法,能够快速、准确地计算变位之后的行

考虑齿面接触特性的直齿轮啮合刚度研究.docx
考虑齿面接触特性的直齿轮啮合刚度研究直齿轮是一种常见的传动装置,广泛应用于各种机械设备中。在设计和使用直齿轮传动时,了解和研究齿面接触特性对于确定传动装置的性能非常重要。本文将围绕齿面接触特性和直齿轮啮合刚度展开研究,重点分析其对传动装置的影响。齿面接触特性是指直齿轮啮合过程中齿面之间的相互接触情况。它直接关系到直齿轮传动的工作性能和寿命。在直齿轮啮合过程中,由于齿轮表面的几何形状和运动变化,齿面之间会产生接触应力和变形。这些接触应力和变形对于齿面的强度和刚度都会产生影响。啮合刚度是描述直齿轮传动的刚性特

齿面磨损对齿轮啮合刚度影响的计算与分析.docx
齿面磨损对齿轮啮合刚度影响的计算与分析齿轮传动是一种常见的机械传动方式,其中齿面磨损是齿轮传动中普遍存在的一种情况。齿面磨损会对齿轮啮合刚度产生影响,进而影响齿轮传动的稳定性和工作效率,因此对齿面磨损对齿轮啮合刚度影响的计算与分析具有重要意义。一、齿面磨损的类型及原因齿面磨损可分为几种类型:疲劳磨损、过载磨损、磨粒磨损和腐蚀磨损等。其常见原因包括载荷过大、材料质量不良、润滑不良、腐蚀、损伤或杂质等。二、齿面磨损对齿轮啮合刚度的影响机理齿面磨损会改变齿轮表面形状,使齿面在啮合时的接触长度、接触形状和接触应力

一种基于齿廓普遍方程的行星齿轮时变啮合刚度计算方法.pdf
本发明公开了一种基于齿廓普遍方程的行星齿轮时变啮合刚度计算的方法,该方法参照轮齿的实际加工过程,将齿轮的齿廓分为齿顶圆弧、基本齿廓曲线、过渡曲线和齿根圆弧四部分,分别推导了参与啮合的齿根过渡曲线方程和基本齿廓曲线方程及滚动角的变化范围,得到了准确的齿廓曲线;进而应用能量法推导了轮齿的刚度方程;求解得到行星齿轮的时变啮合刚度。本方法既避免了改进能量法的分情况讨论的问题,简化了计算步骤,也使计算结果更加接近实际。

融合齿背接触机理的高速圆柱齿轮动态啮合刚度计算方法.pdf
本发明公开了融合齿背接触机理的高速圆柱齿轮动态啮合刚度计算方法,属于高速圆柱齿轮传动系统稳定性分析领域。首先由圆柱齿轮传动系统振动模型求得齿面相对振动位移,根据齿面振动位移的取值范围判定齿面的正常啮合/脱啮/齿背接触啮合状态,结合TCA、LTCA程序计算出的轮齿齿面时变啮合刚度,最终得到同时与啮合时间和齿面振动位移相关联的轮齿实时动态啮合刚度。本发明实现了考虑高转速下圆柱齿轮发生脱啮‑齿背啮合状态下,同时计及啮合时间与齿面振动位移的实时动态啮合刚度计算,有助于理清圆柱齿轮齿面振动内部耦合接触机理,为进一步