
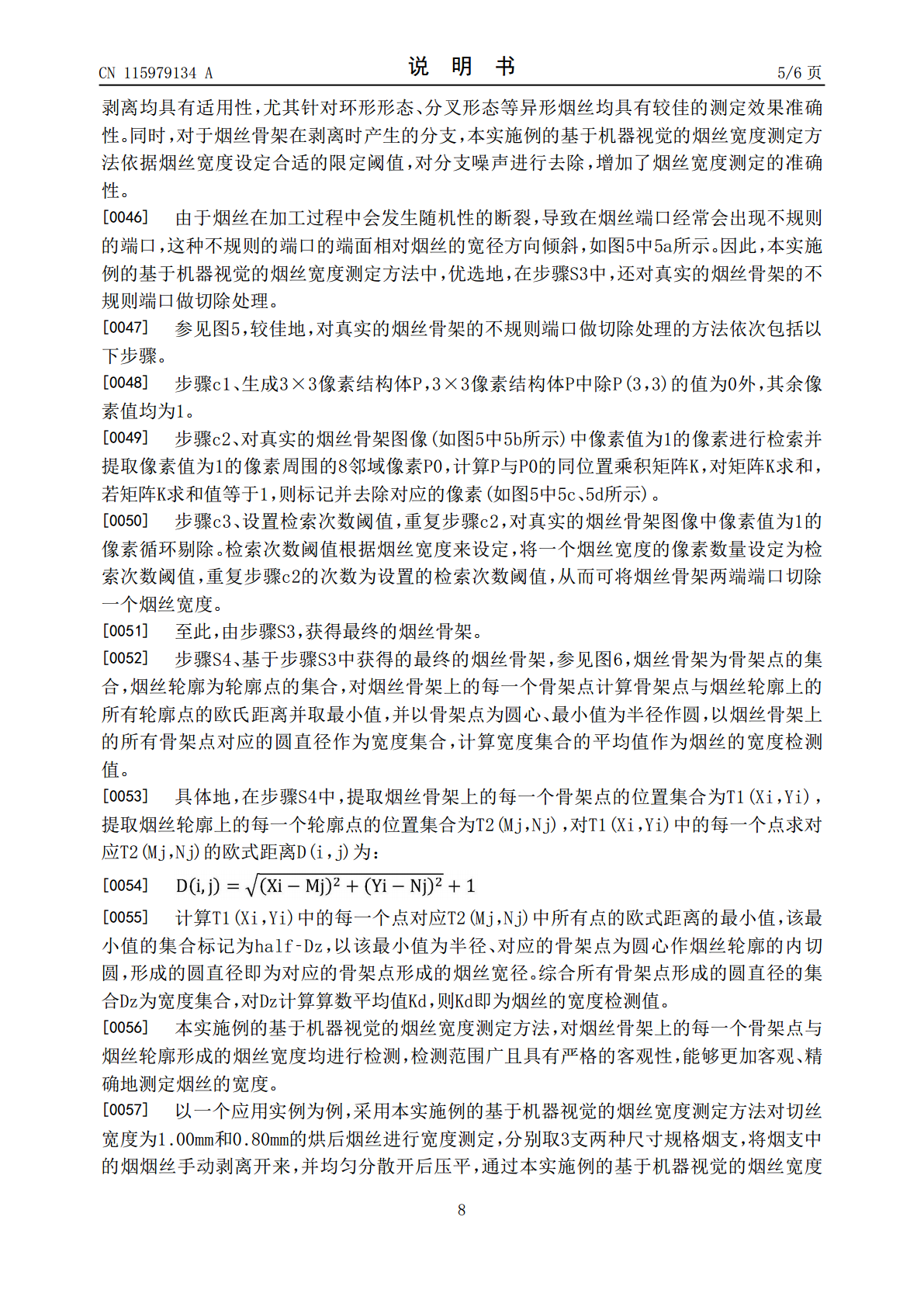
一种基于机器视觉的烟丝宽度测定方法.pdf

一只****呀9

1/10
2/10
3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于机器视觉的烟丝宽度测定方法.pdf
本发明涉及烟草加工技术领域,尤其涉及一种基于机器视觉的烟丝宽度测定方法,依次包括以下步骤:步骤S1、采集烟丝原始图像;步骤S2、对烟丝原始图像进行预处理;步骤S3、提取烟丝轮廓和烟丝骨架;步骤S4、对烟丝骨架上的每一个骨架点计算骨架点与烟丝轮廓上的所有轮廓点的欧氏距离并取最小值,并以骨架点为圆心、最小值为半径作圆,以烟丝骨架上的所有骨架点对应的圆直径作为宽度集合,计算宽度集合的平均值作为烟丝的宽度检测值。对烟丝骨架上的每一个骨架点与烟丝轮廓形成的烟丝宽度均进行检测,检测范围广且具有严格的客观性,能够更加客

基于计算机视觉的烟丝宽度测量方法.docx
基于计算机视觉的烟丝宽度测量方法摘要烟草工业一直是世界范围内的一个重要行业,而烟丝的生产是烟草工业中最重要的环节之一。烟丝宽度的测量是烟丝生产中非常重要的一个步骤。在传统的测量方法中,操作比较复杂,而且测量结果精度不高。因此,本篇研究论文以计算机视觉为基础,介绍了一种新的烟丝宽度测量方法。首先,我们介绍了计算机视觉的原理和技术,然后详细介绍了烟丝宽度测量方法的技术实现以及实验结果。通过对比实验结果和传统方法的实验结果,可以看出基于计算机视觉的烟丝宽度测量方法具有更高的精度和可靠性,能够满足实际生产需要。关

基于机器视觉的不合格叶梗烟丝检测方法.docx
基于机器视觉的不合格叶梗烟丝检测方法基于机器视觉的不合格叶梗烟丝检测方法摘要:叶梗是烟丝加工过程中的一种常见污染物,具有较高的含水率和硬度,会对烟丝质量产生负面影响。本文提出了基于机器视觉的不合格叶梗烟丝检测方法。该方法利用计算机视觉技术,通过图像采集、预处理、特征提取和分类识别等关键步骤来实现不合格叶梗烟丝检测。实验结果表明,该方法能够有效地检测和识别不合格叶梗烟丝,对于提高烟丝质量和降低生产成本具有重要意义。1.引言烟叶是实现烟丝生产的重要原料,而烟丝质量是影响烟叶加工效率和产品质量的关键因素之一。而

基于机器视觉的烟丝桶检测方法、装置、设备及介质.pdf
本申请提供了一种基于机器视觉的烟丝桶检测方法、装置、设备及存储介质,所述方法通过DBNet网络检测待检测的烟丝桶桶底图像,得到四个桶底角坐标,根据所述桶底角坐标对所述烟丝桶桶底图像进行旋转矫正,得到桶底矫正图像;根据预设阈值过滤方法,对所述桶底矫正图像进行处理,得到烟丝残留物图像,并将所述烟丝残留物图像转为烟丝残留物灰度图像;在所述烟丝残留物灰度图像中提取烟丝残留物像素数量,根据所述烟丝残留物像素数量和所述烟丝残留物灰度图像像素总数量计算得到烟丝残留物面积占比。本申请合理的实现了烟丝残留物检测自动化管理,
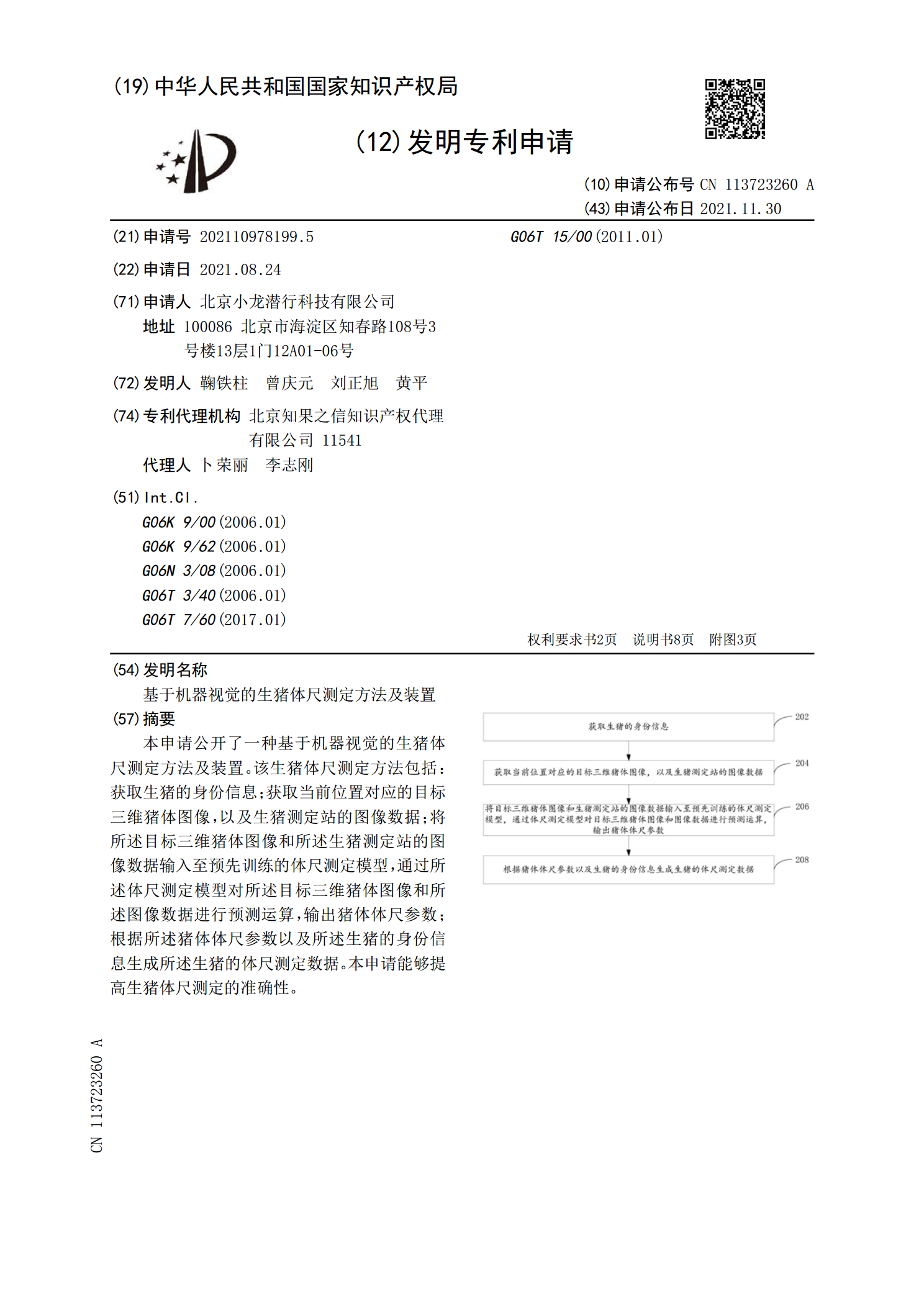
基于机器视觉的生猪体尺测定方法及装置.pdf
本申请公开了一种基于机器视觉的生猪体尺测定方法及装置。该生猪体尺测定方法包括:获取生猪的身份信息;获取当前位置对应的目标三维猪体图像,以及生猪测定站的图像数据;将所述目标三维猪体图像和所述生猪测定站的图像数据输入至预先训练的体尺测定模型,通过所述体尺测定模型对所述目标三维猪体图像和所述图像数据进行预测运算,输出猪体体尺参数;根据所述猪体体尺参数以及所述生猪的身份信息生成所述生猪的体尺测定数据。本申请能够提高生猪体尺测定的准确性。