
一种基于模式轮廓限制的毫米波雷达人体动作识别方法.pdf

大渊****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于模式轮廓限制的毫米波雷达人体动作识别方法.pdf
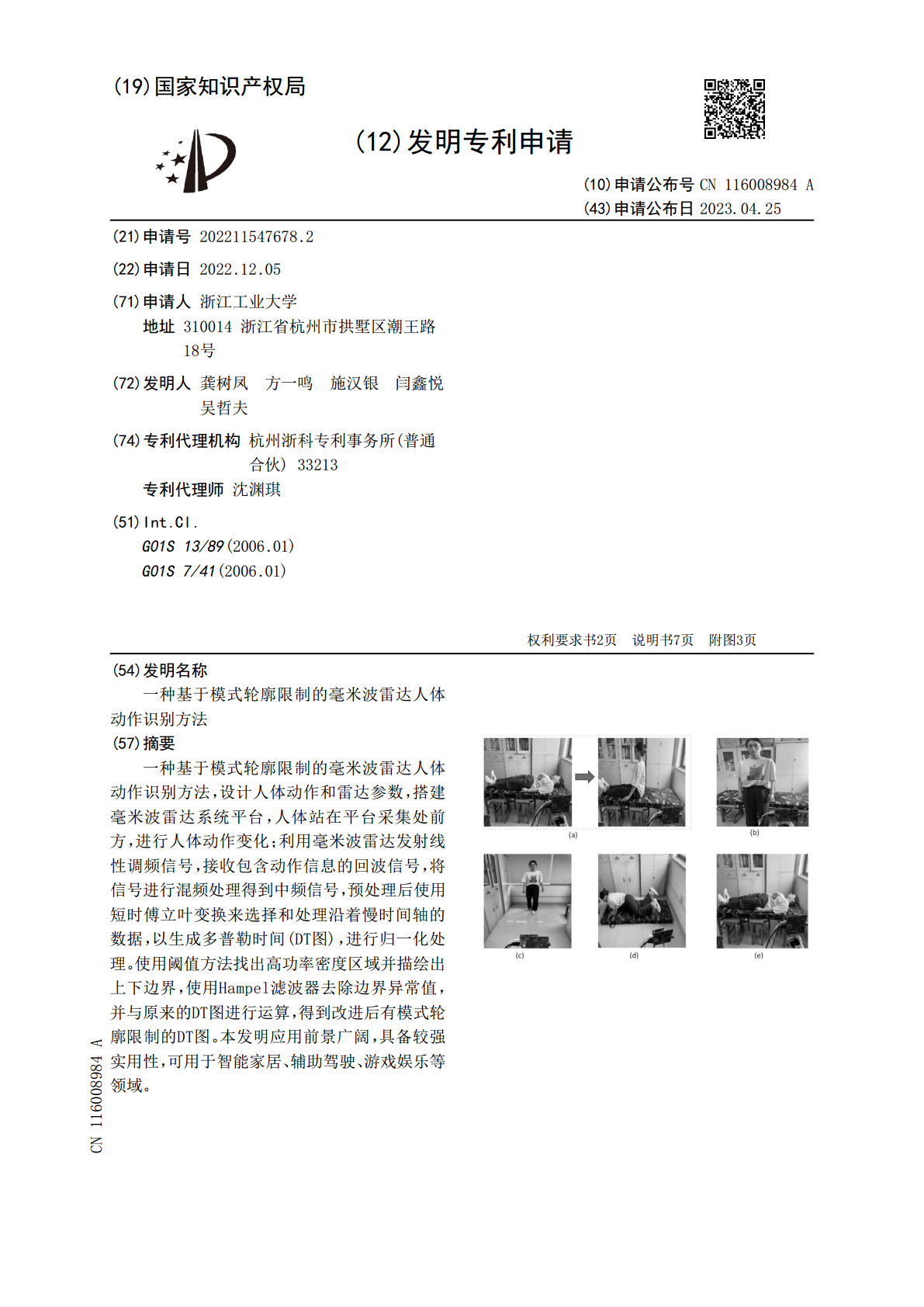
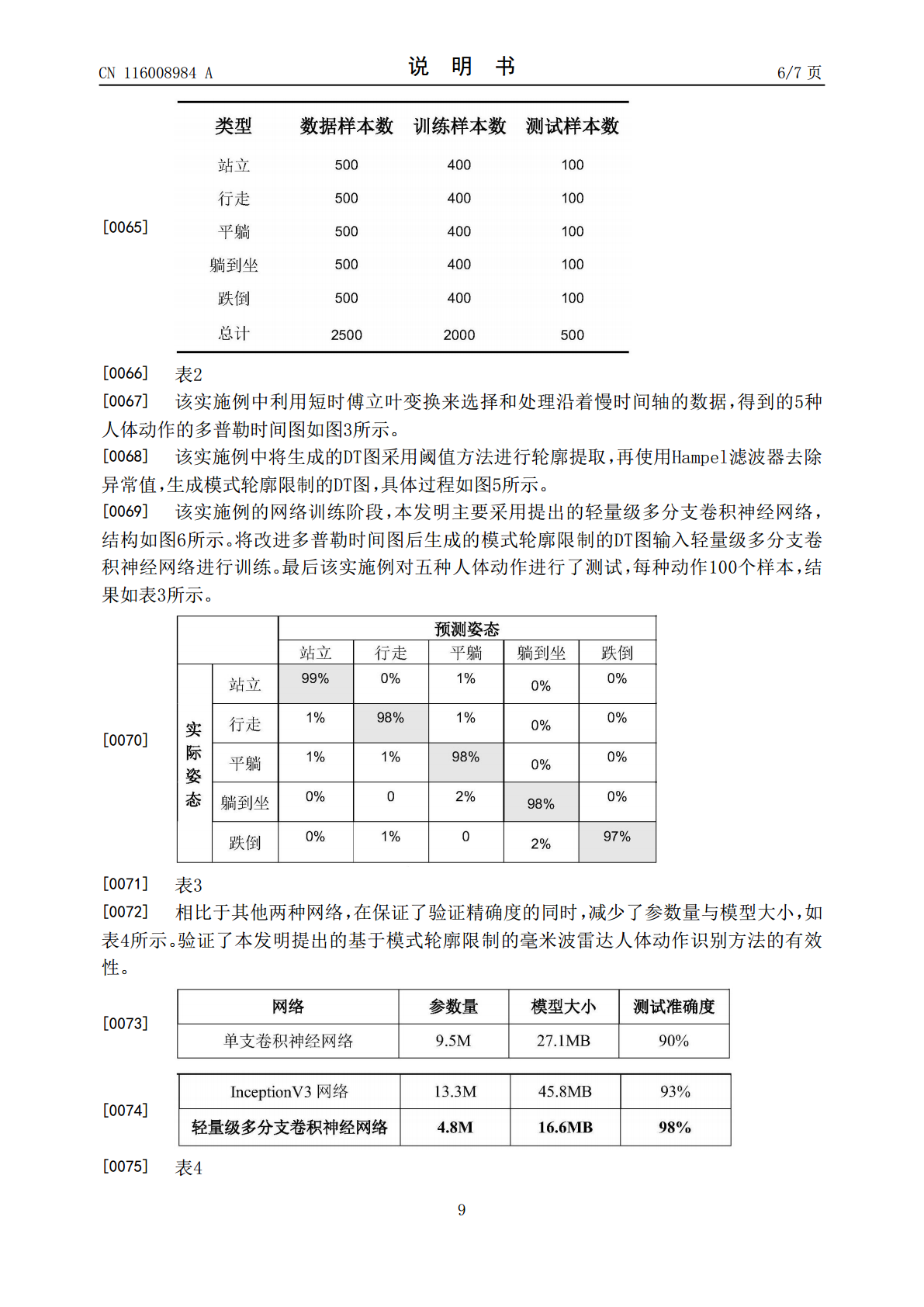
一种基于模式轮廓限制的毫米波雷达人体动作识别方法,设计人体动作和雷达参数,搭建毫米波雷达系统平台,人体站在平台采集处前方,进行人体动作变化;利用毫米波雷达发射线性调频信号,接收包含动作信息的回波信号,将信号进行混频处理得到中频信号,预处理后使用短时傅立叶变换来选择和处理沿着慢时间轴的数据,以生成多普勒时间(DT图),进行归一化处理。使用阈值方法找出高功率密度区域并描绘出上下边界,使用Hampel滤波器去除边界异常值,并与原来的DT图进行运算,得到改进后有模式轮廓限制的DT图。本发明应用前景广阔,具备较强实

一种基于人体轮廓的动作识别方法.pdf
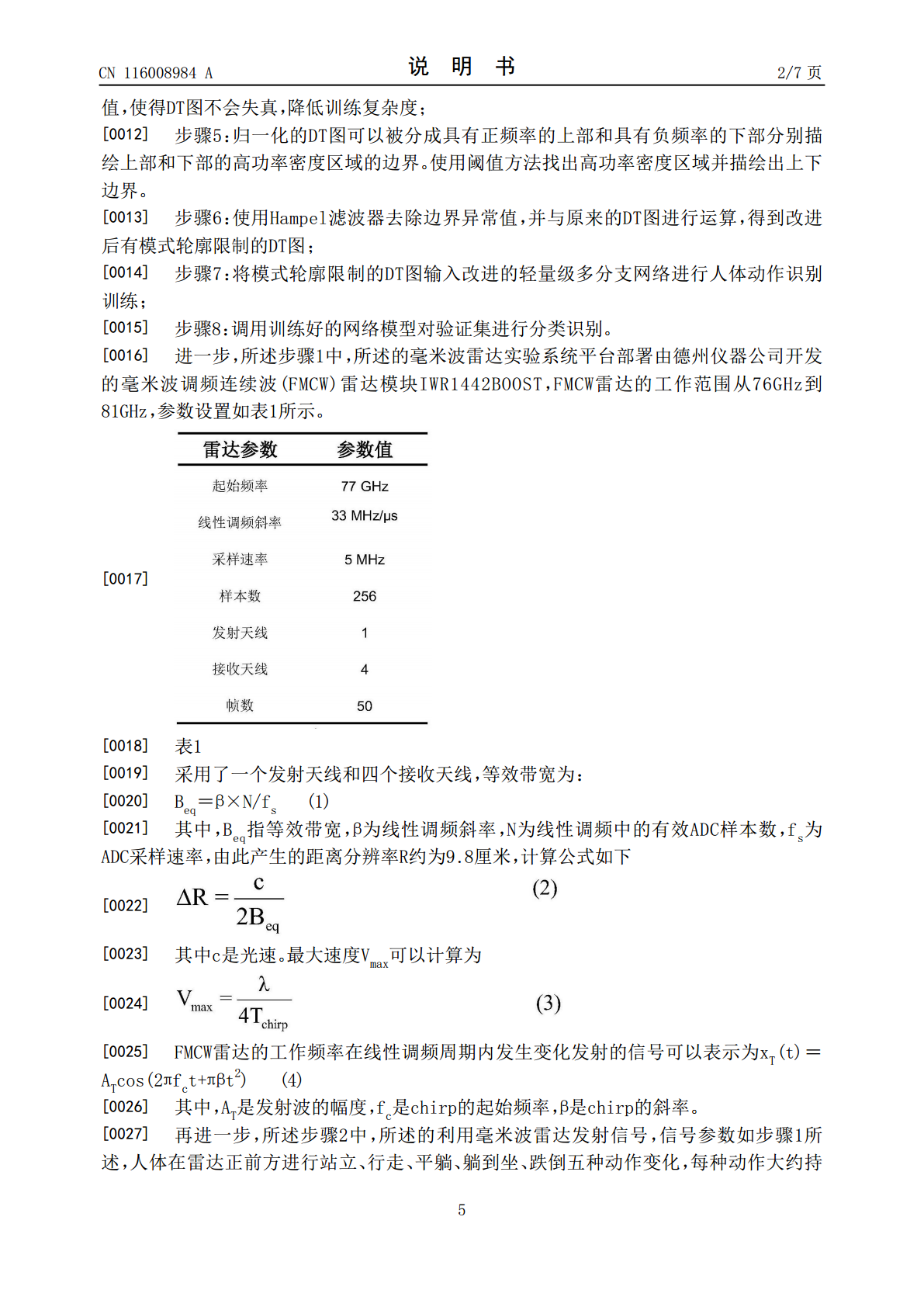
本发明公开了一种基于人体轮廓的动作识别方法,包括以下步骤:首先,利用数学形态学以及种子区域生长法提取出人体的轮廓;然后,将人体的轮廓拟合成多边形;最后,通过多边形各个顶点的位置关系识别人体的动作。本发明并未采用相对复杂的分类器识别样本的方式,易于实现,且对硬件设备的要求较低,在某些应用场合,比如无人机操控,具备非常高的实用价值。
基于毫米波雷达的房间墙体轮廓识别方法及终端设备.pdf
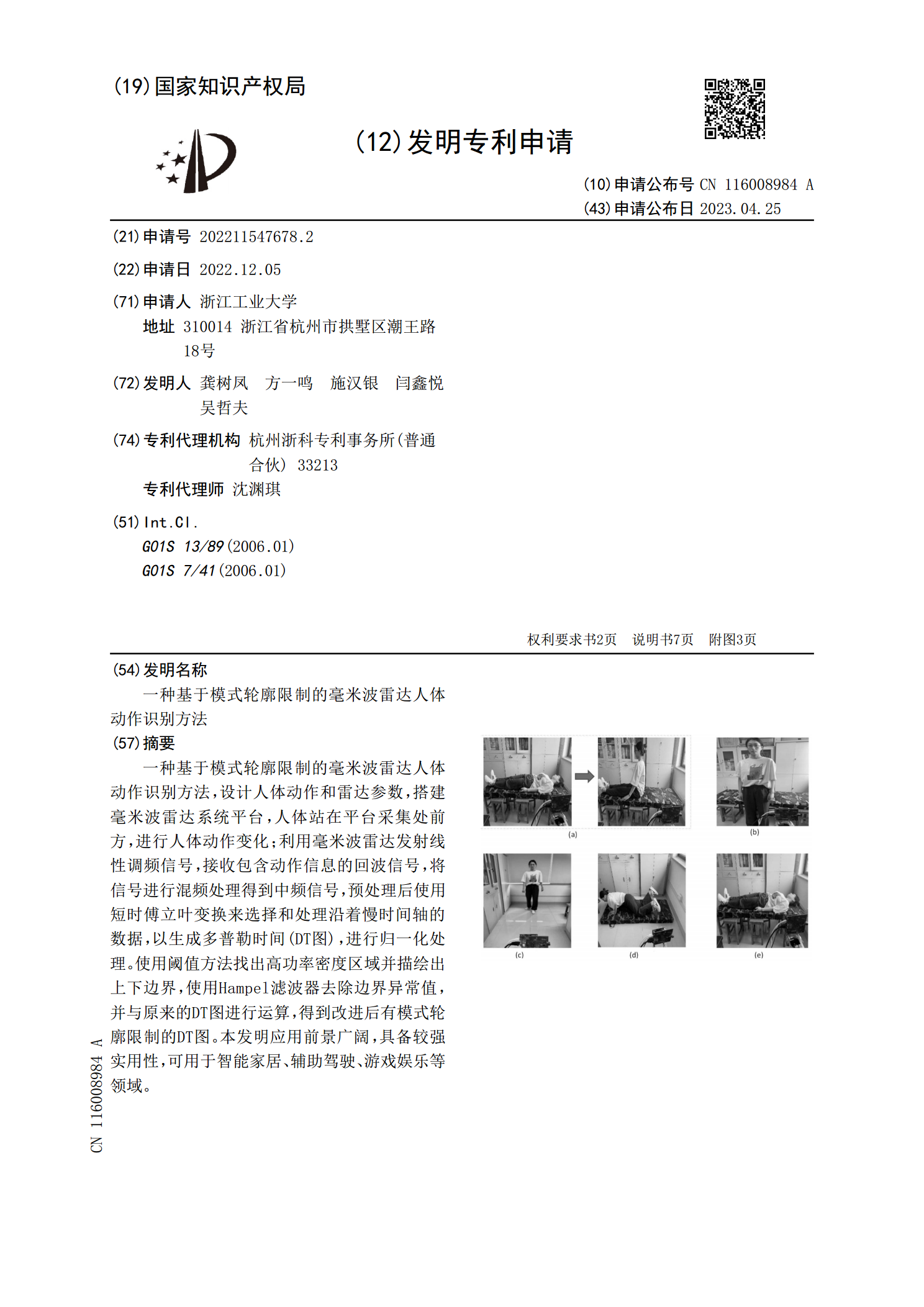
本发明适用于轮廓识别技术领域,提供了一种基于毫米波雷达的房间墙体轮廓识别方法及终端设备,该方法包括:通过根据毫米波雷达对室内目标发射信号得到的回波信号进行采样,得到每帧对应的采样点数的数据矩阵;对每一帧的数据矩阵进行点云信息处理,得到预设帧数的点云信息;依次对点云信息对应的点进行聚类处理,确定第一目标聚类点;根据各个第一目标聚类点内包含的聚类点元素数量,确定第二目标聚类点;根据各个第二目标聚类点进行计算,确定墙体轮廓范围,从而可以自动识别墙体轮廓范围,并对上报的墙体轮廓范围进行限制,有效抑制虚假目标,且毫

一种基于毫米波雷达的手势识别方法.pdf
本发明公开了一种基于毫米波雷达的手势识别方法,该方法包括:构建卷积神经网络模型;获取多种手势的轨迹图作为训练集F,基于所述训练集F对所述卷积神经网络模型训练,得到优化识别模型;所述手势轨迹图为最大峰值对应的动目标在距离‑多普勒坐标系下的移动轨迹;将识别手势的轨迹图输入所述优化识别模型,以识别出所述识别手势的手势类型。本发明实施方式提供的手势识别方法中利用卷积神经网络模型对多种手势的轨迹图训练,得到优化识别模型,将识别手势的轨迹图输入优化识别模型,能够快速并准确的得到手势类型。手势识别方法较为简单,数据处理
一种基于毫米波雷达的手势识别方法.pdf
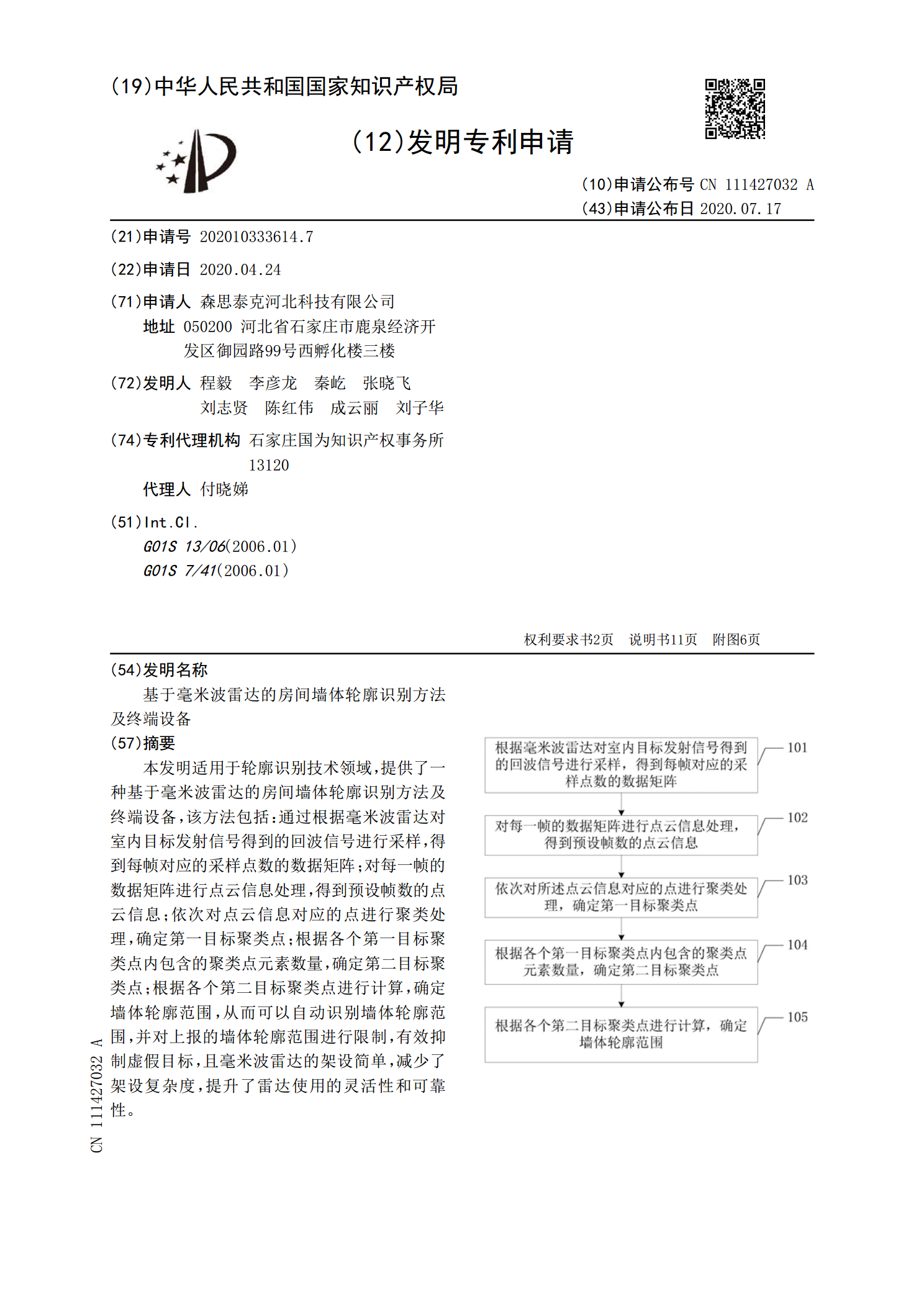
本发明公开了一种基于毫米波雷达的手势识别方法。通过每一帧得到的距离特征和速度特征进行拼接,形成距离-时间特征,速度-时间特征以及速度-距离特征,根据距离-时间特征,距离‑时间特征表征目标物相对雷达的运动趋势,即探测目标的接近或远离,速度‑时间特征表示目标相对雷达的运动速度,正为靠近,负为远离,距离‑速度特征反应了目标速度在不同距离上的分布,以此得到目标运动轨迹来实现动作判断,进而实现手势识别。可实现全天候的运动目标控制,探测距离达可达3‑50米提升用户智能指引体验,节约用户时间成本,操作简单,生动、形象,