
基于改进离散鲸鱼优化算法的机器人路径规划.docx

02****gc


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于改进离散鲸鱼优化算法的机器人路径规划.docx
基于改进离散鲸鱼优化算法的机器人路径规划1.内容简述本文提出了一种基于改进离散鲸鱼优化算法(DWOA)的机器人路径规划方法。DWOA算法作为一种高效的群智能优化算法,在处理复杂优化问题时表现出良好的性能。本文首先对DWOA算法进行了简要介绍,然后针对其可能存在的问题,如收敛速度慢和搜索精度不高,提出了几种改进策略。这些改进策略包括引入自适应权重、动态调整离散化阈值和融合其他优化技术。通过仿真分析和实际应用对比,验证了改进后的DWOA算法在机器人路径规划中的有效性和优越性。本文的研究为机器人路径规划问题提供
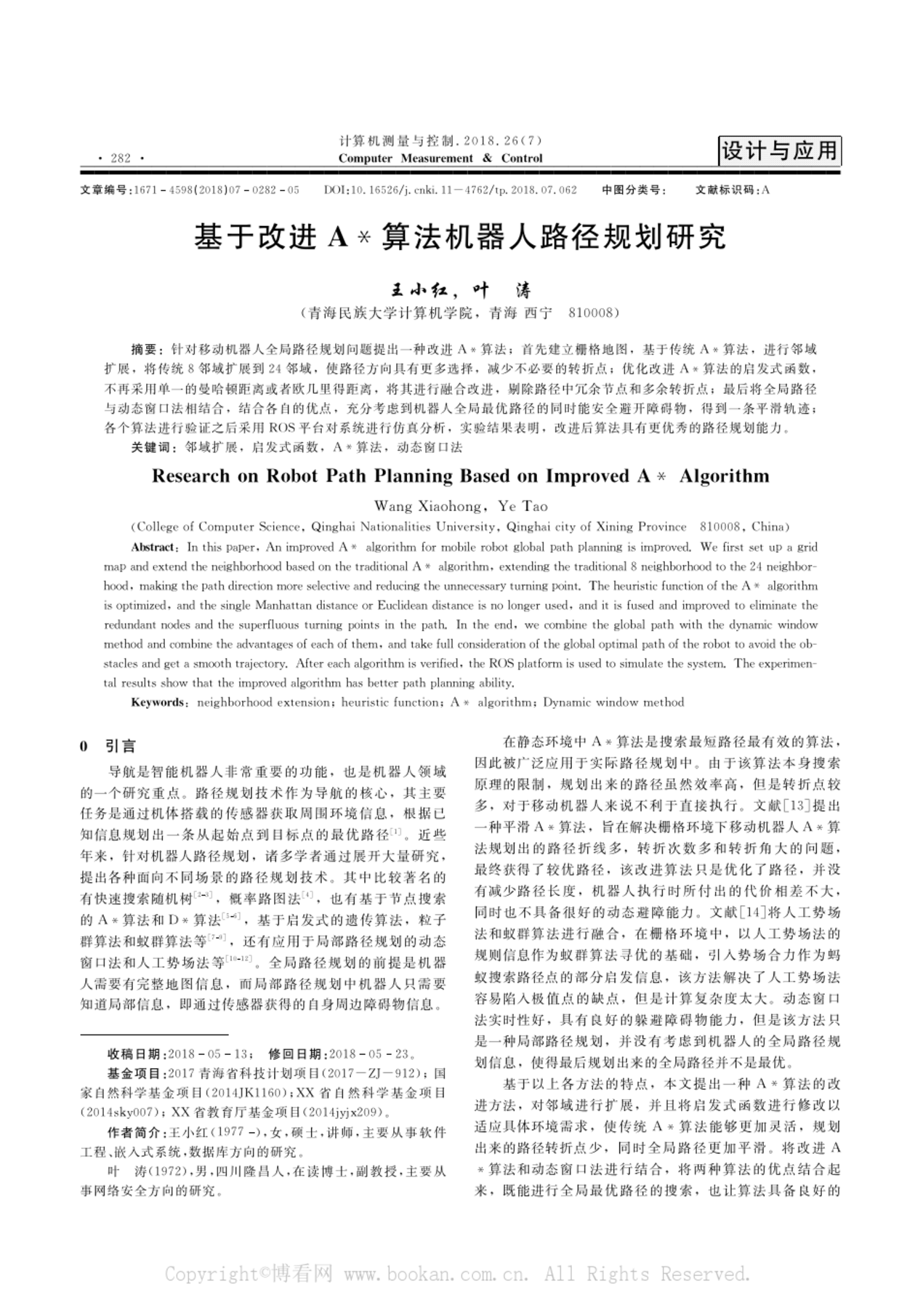
基于改进A算法机器人路径规划研究.pdf

基于改进蚁群算法的机器人路径规划.docx
基于改进蚁群算法的机器人路径规划1.内容描述本文档主要介绍了基于改进蚁群算法(ImprovedAntColonyOptimization,IACO)的机器人路径规划方法。蚁群算法是一种模拟自然界蚂蚁觅食行为的优化算法,通过模拟蚂蚁在寻找食物过程中的信息素挥发、蚂蚁之间的相互协作等行为来求解问题。机器人路径规划是将这种优化算法应用于机器人运动规划领域,旨在为机器人提供一种高效、灵活的路径规划方法。改进蚁群算法是在传统蚁群算法的基础上进行优化和拓展的一种算法。它主要通过对蚁群算法中的信息素更新策略、参数设置、
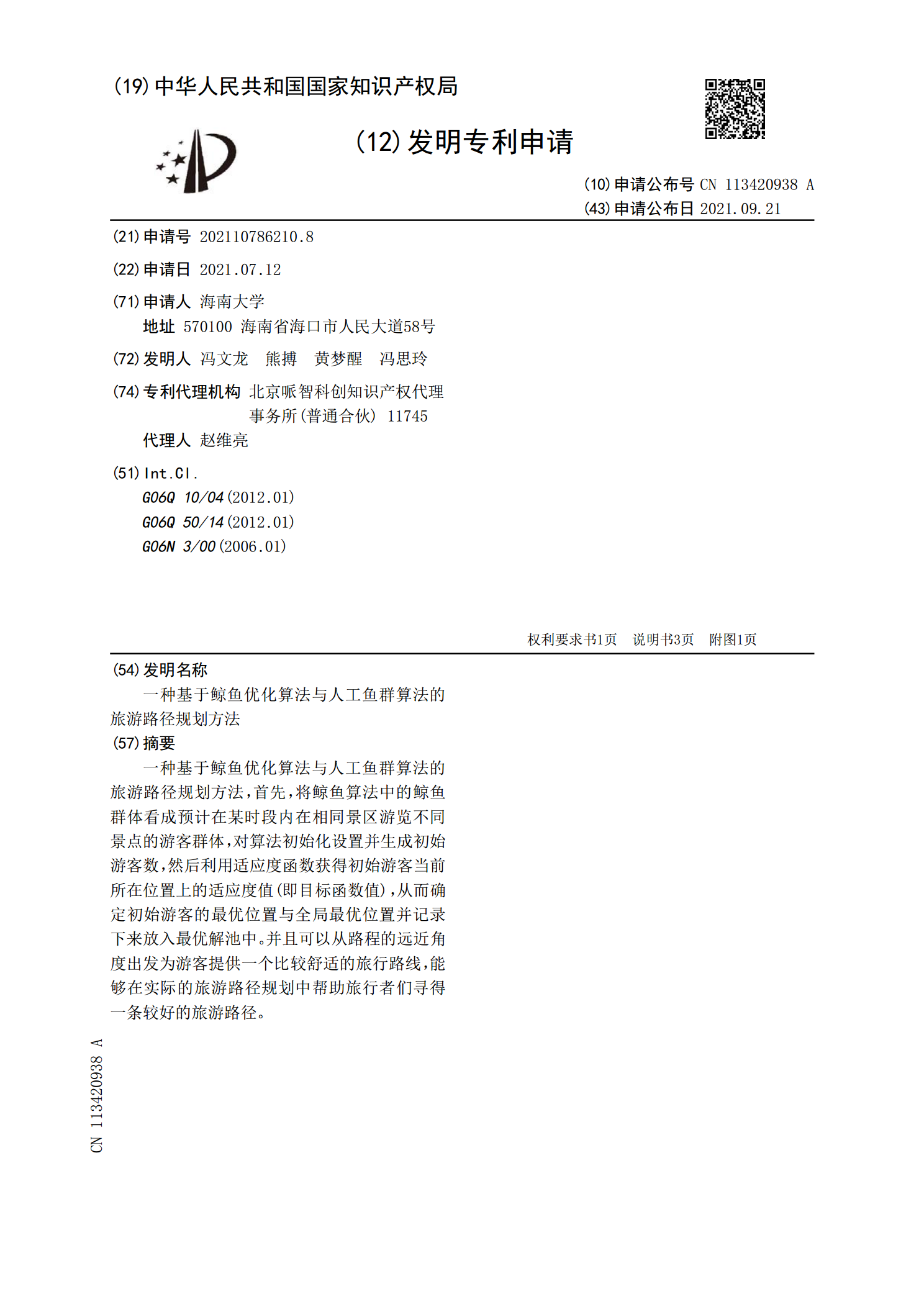
一种基于鲸鱼优化算法与人工鱼群算法的旅游路径规划方法.pdf
一种基于鲸鱼优化算法与人工鱼群算法的旅游路径规划方法,首先,将鲸鱼算法中的鲸鱼群体看成预计在某时段内在相同景区游览不同景点的游客群体,对算法初始化设置并生成初始游客数,然后利用适应度函数获得初始游客当前所在位置上的适应度值(即目标函数值),从而确定初始游客的最优位置与全局最优位置并记录下来放入最优解池中。并且可以从路程的远近角度出发为游客提供一个比较舒适的旅行路线,能够在实际的旅游路径规划中帮助旅行者们寻得一条较好的旅游路径。

基于改进鲸鱼算法的收卷张力PID控制的性能优化.docx
基于改进鲸鱼算法的收卷张力PID控制的性能优化1.内容概括本文主要研究了基于改进鲸鱼算法的收卷张力PID控制在各种工况下的性能优化。对传统的鲸鱼算法进行了改进,以提高其收敛速度和稳定性。通过对比分析改进后的鲸鱼算法与传统PID控制器在收卷张力控制过程中的表现,探讨了两者之间的巋异。根据实验结果,提出了一种针对改进鲸鱼算法的收卷张力PID控制的性能优化方法,包括参数调整、自适应滤波等策略。通过对这些优化措施的研究和实现,可以有效提高收卷张力的控制精度和稳定性,为相关工业应用提供理论依据和技术支持。1.1研究