
一种罐体外壁高效率打磨装置.pdf

哲妍****彩妍

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种罐体外壁高效率打磨装置.pdf
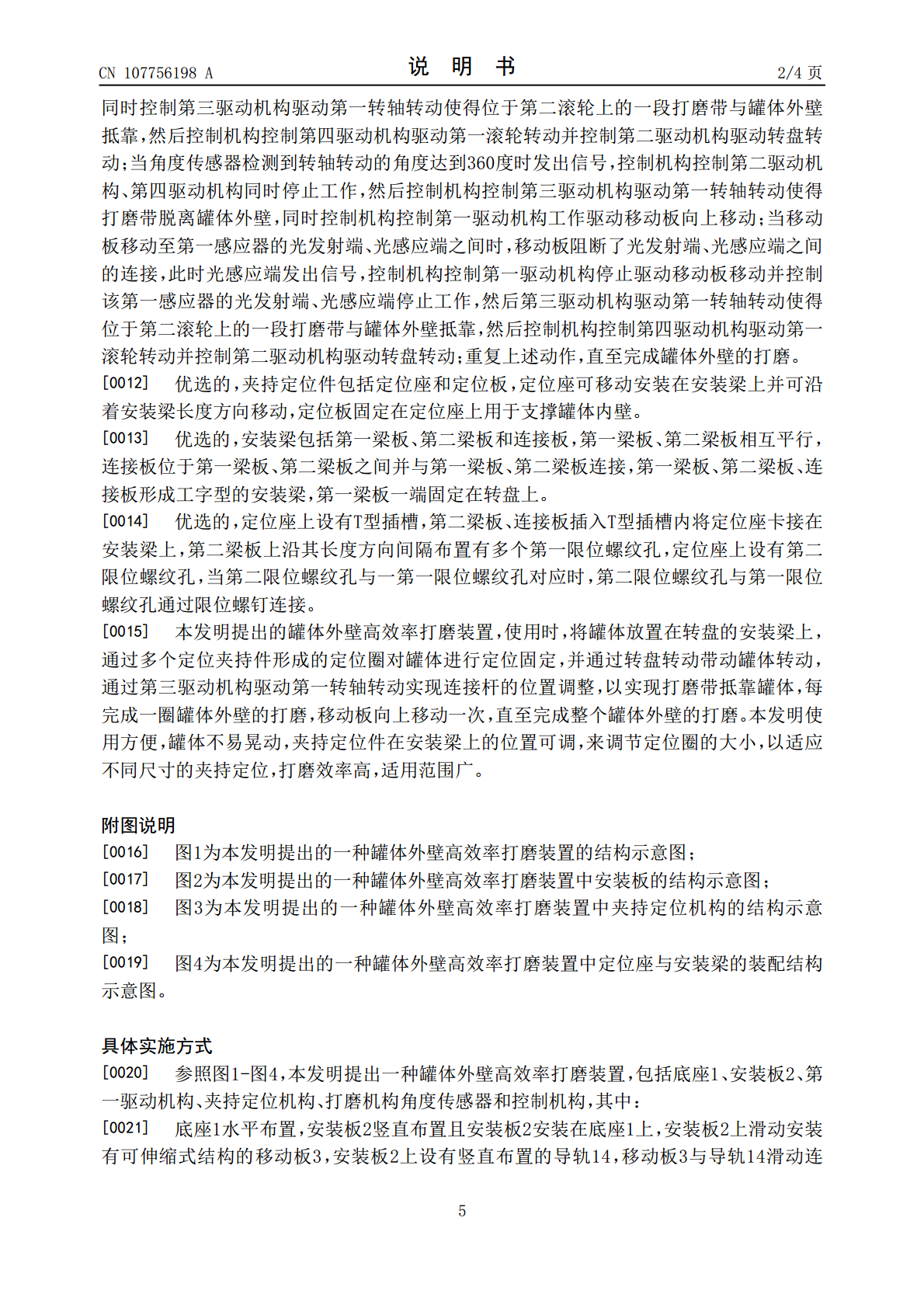
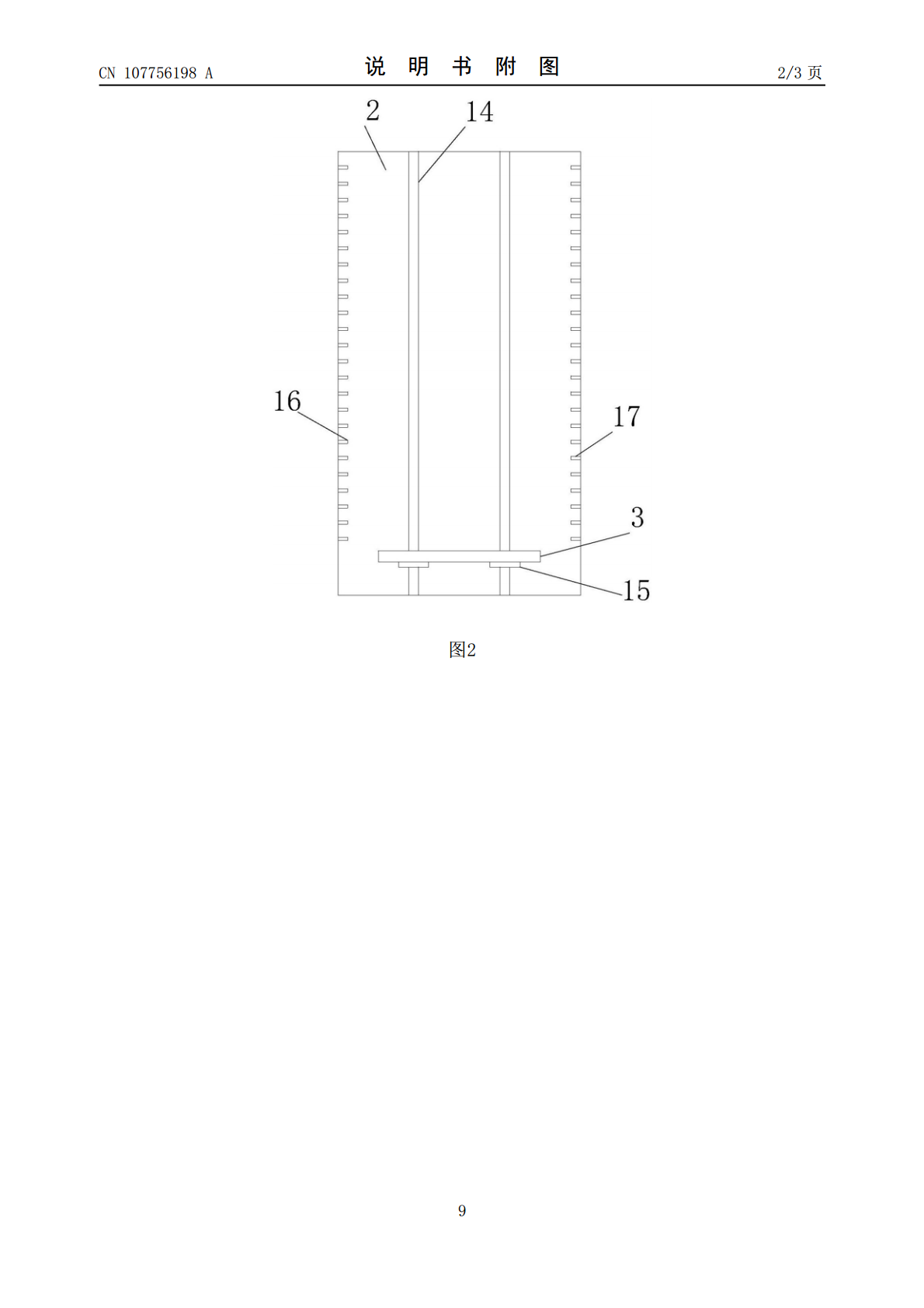
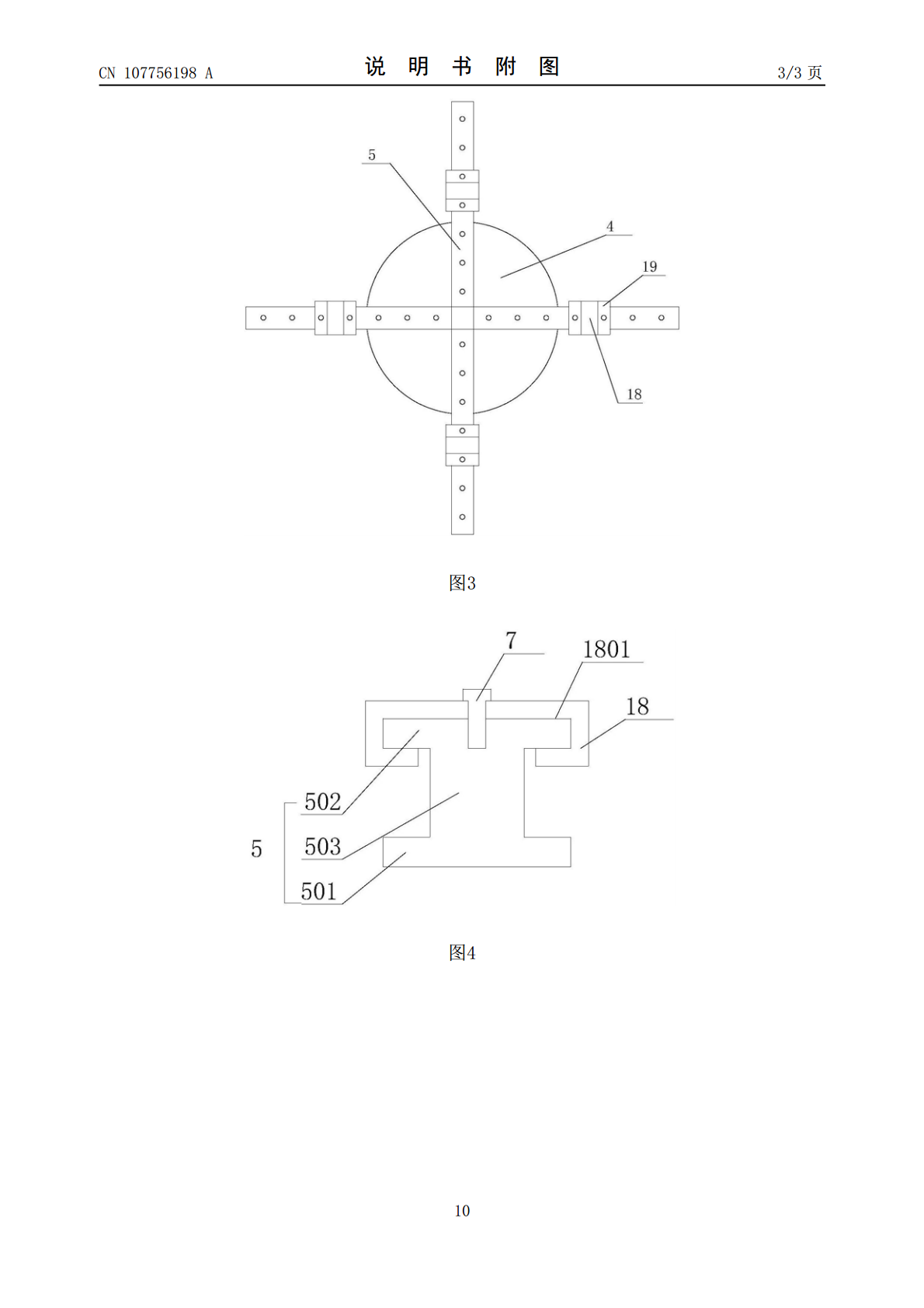
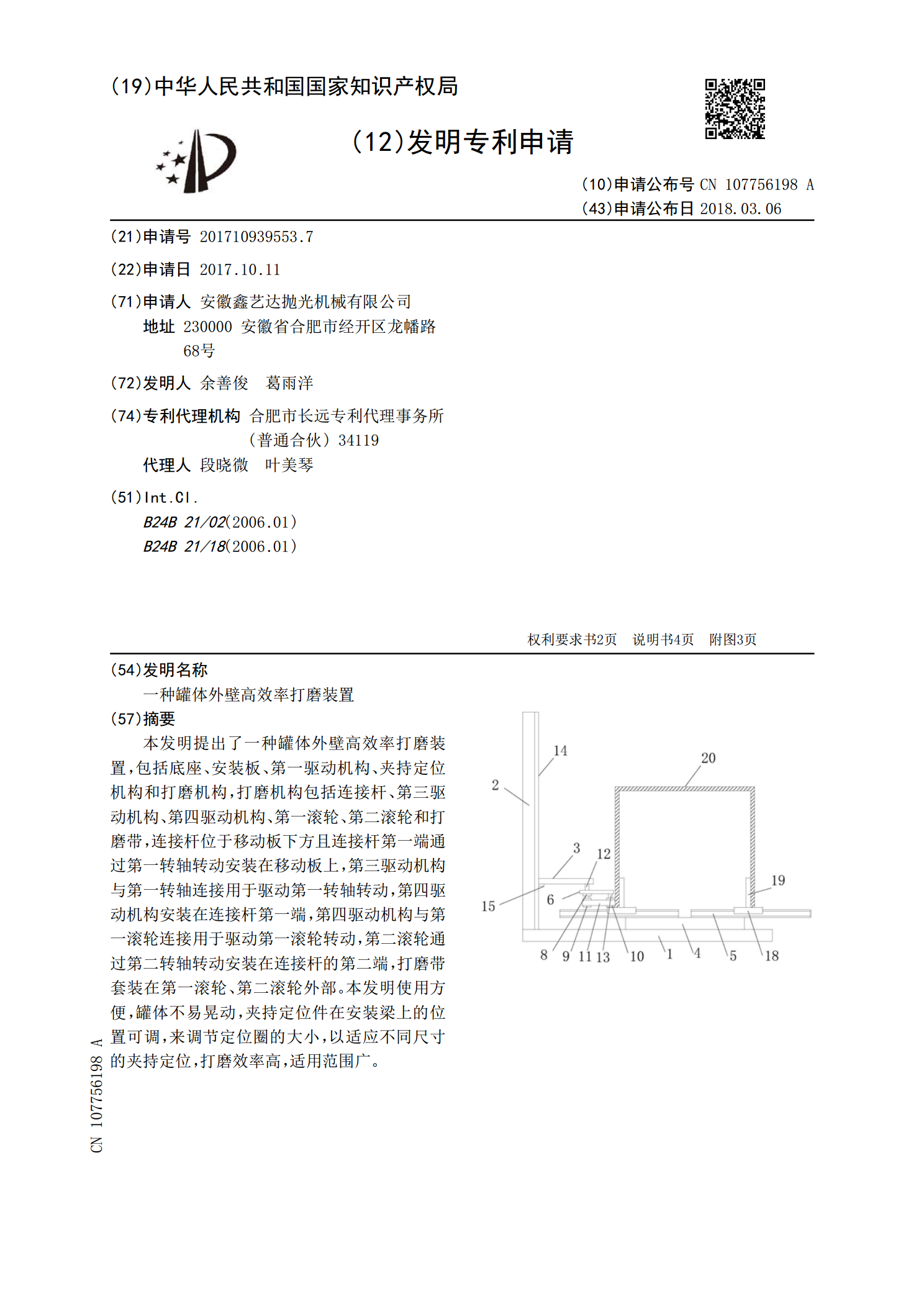
本发明提出了一种罐体外壁高效率打磨装置,包括底座、安装板、第一驱动机构、夹持定位机构和打磨机构,打磨机构包括连接杆、第三驱动机构、第四驱动机构、第一滚轮、第二滚轮和打磨带,连接杆位于移动板下方且连接杆第一端通过第一转轴转动安装在移动板上,第三驱动机构与第一转轴连接用于驱动第一转轴转动,第四驱动机构安装在连接杆第一端,第四驱动机构与第一滚轮连接用于驱动第一滚轮转动,第二滚轮通过第二转轴转动安装在连接杆的第二端,打磨带套装在第一滚轮、第二滚轮外部。本发明使用方便,罐体不易晃动,夹持定位件在安装梁上的位置可调,

一种大型罐体外壁抛光装置.pdf
一种大型罐体外壁抛光装置属于种抛光设备;包括横轴、纵轴和控制箱;横轴的外端部设置有在水平面内转动的转体,转体上设置有多个伸缩杆;纵轴上设置有纵轴上下运动的抛光器,抛光器包括沿纵轴上下运动的滑块,与滑块转轴连接的,在水平面内转动的转臂,端连接转臂,另端连接滑块的弹簧;转臂的外端设置有沿水平面转动的毛刷和砂轮;在弹簧弹力作用下,安装在转臂上的毛刷和砂轮压向放置在转体上的罐体;控制箱控制滑块沿纵轴的运动速度和方向,毛刷和砂轮的转动速度和方向,以及转体的转动速度和方向;本发明能针对大型罐体进行自动化抛光,并兼顾了
一种钧瓷外壁打磨装置.pdf
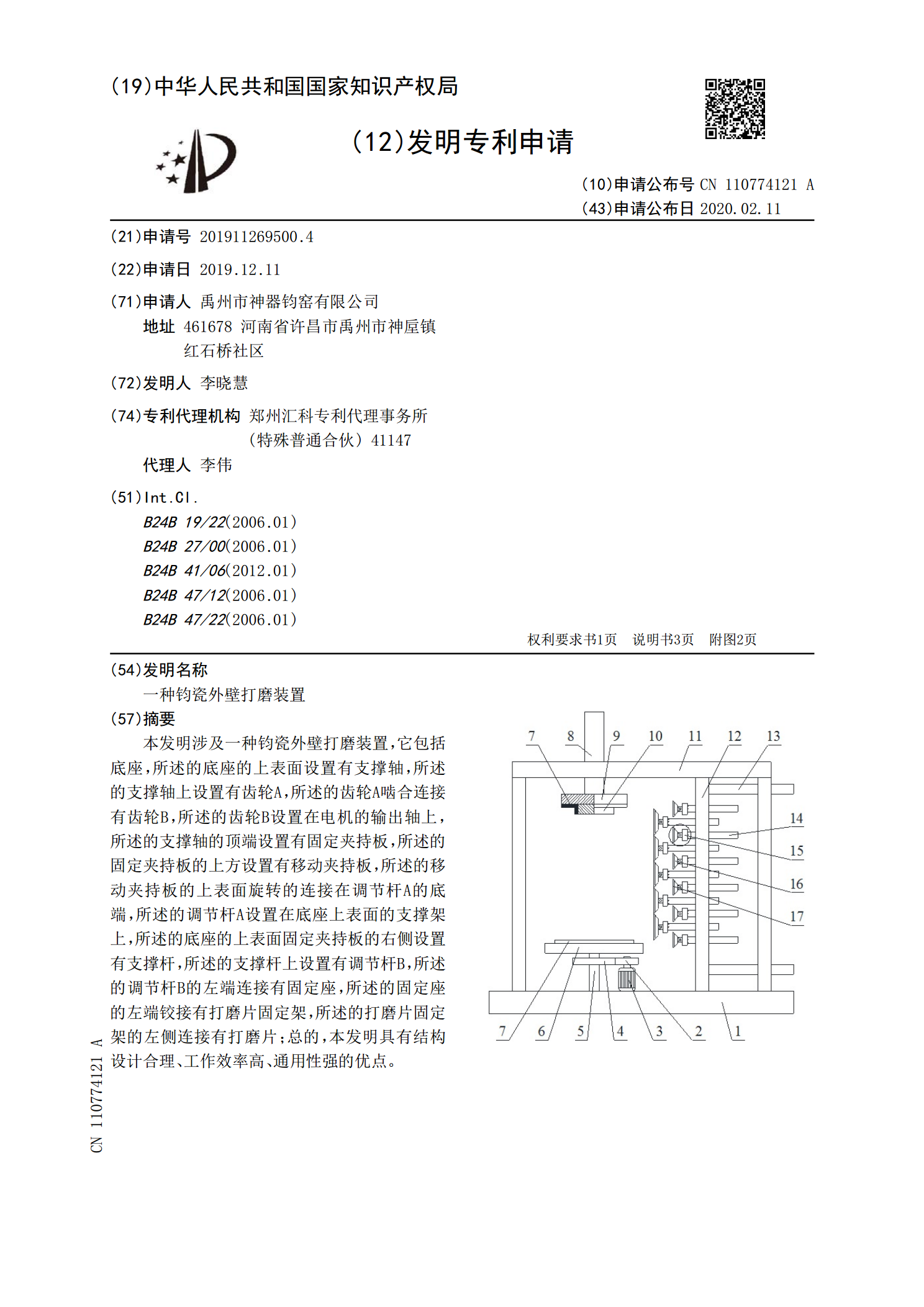
本发明涉及一种钧瓷外壁打磨装置,它包括底座,所述的底座的上表面设置有支撑轴,所述的支撑轴上设置有齿轮A,所述的齿轮A啮合连接有齿轮B,所述的齿轮B设置在电机的输出轴上,所述的支撑轴的顶端设置有固定夹持板,所述的固定夹持板的上方设置有移动夹持板,所述的移动夹持板的上表面旋转的连接在调节杆A的底端,所述的调节杆A设置在底座上表面的支撑架上,所述的底座的上表面固定夹持板的右侧设置有支撑杆,所述的支撑杆上设置有调节杆B,所述的调节杆B的左端连接有固定座,所述的固定座的左端铰接有打磨片固定架,所述的打磨片固定架的左

一种灯管外壁打磨装置.pdf
本发明涉及灯具加工技术领域,尤其涉及一种灯管外壁打磨装置;本发明的灯管外壁打磨装置,包括底座,还包括卡接于所述底座的上侧的一端的第一固定部件、通过螺纹旋接于所述底座的上侧的另一端的第二固定部件、操作架和外圈打磨部件;所述操作架包括主框架、卡接于所述主框架内的打磨操作箱、第二导向筒、卡接于所述主框架的内且罩设于所述打磨操作箱的上端的载物罩、穿设于所述主框架的上部且下端和所述载物罩的内腔连通的第一导向筒、第一卡接座和卡接于所述第一卡接座的下端的卡接脚;本发明的灯管外壁打磨装置的第一固定部件和第二固定部件可以对
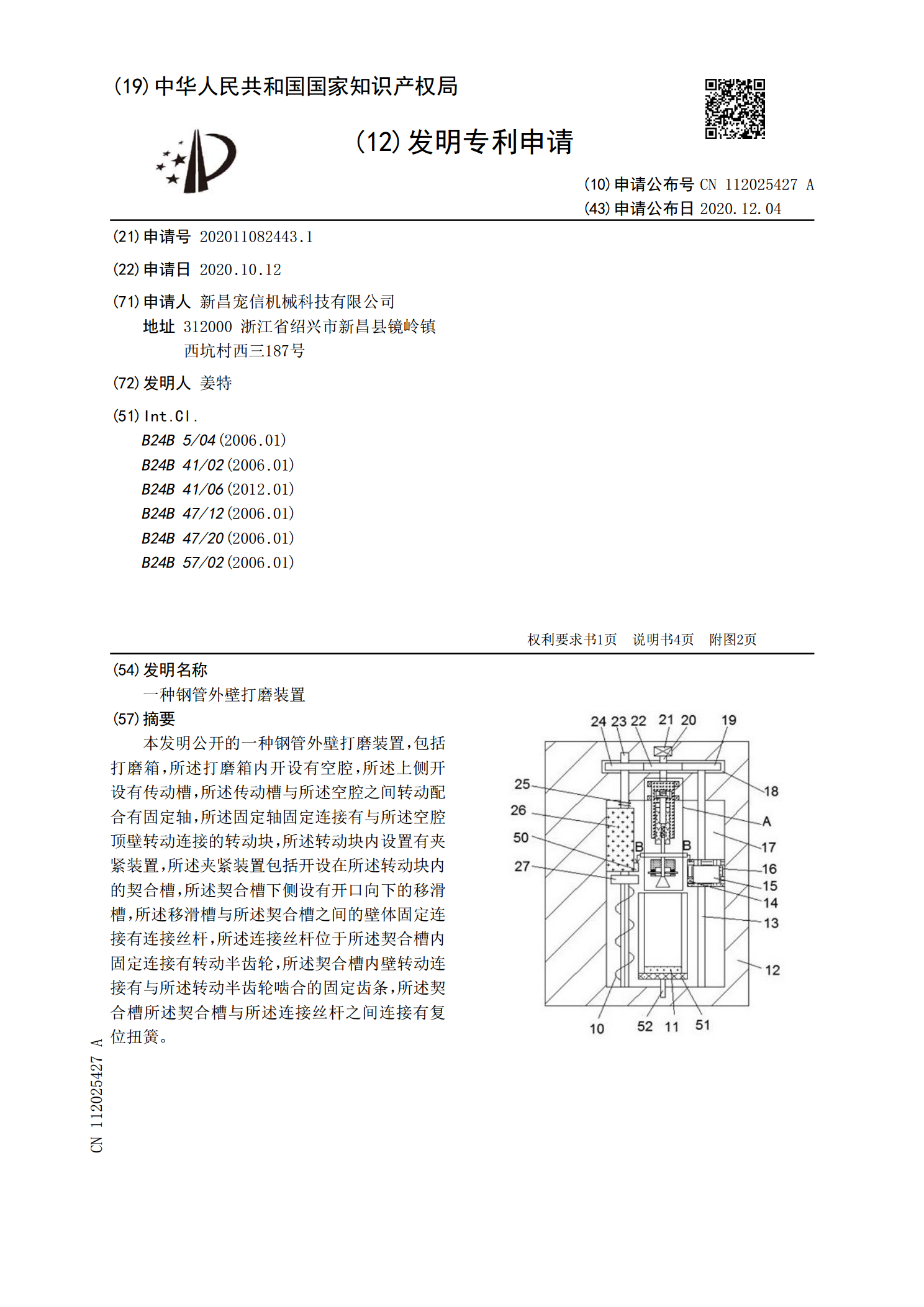
一种钢管外壁打磨装置.pdf
本发明公开的一种钢管外壁打磨装置,包括打磨箱,所述打磨箱内开设有空腔,所述上侧开设有传动槽,所述传动槽与所述空腔之间转动配合有固定轴,所述固定轴固定连接有与所述空腔顶壁转动连接的转动块,所述转动块内设置有夹紧装置,所述夹紧装置包括开设在所述转动块内的契合槽,所述契合槽下侧设有开口向下的移滑槽,所述移滑槽与所述契合槽之间的壁体固定连接有连接丝杆,所述连接丝杆位于所述契合槽内固定连接有转动半齿轮,所述契合槽内壁转动连接有与所述转动半齿轮啮合的固定齿条,所述契合槽所述契合槽与所述连接丝杆之间连接有复位扭簧。