
智能仓储系统及其工作方法.pdf

猫巷****晓容


1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能仓储系统及其工作方法.pdf
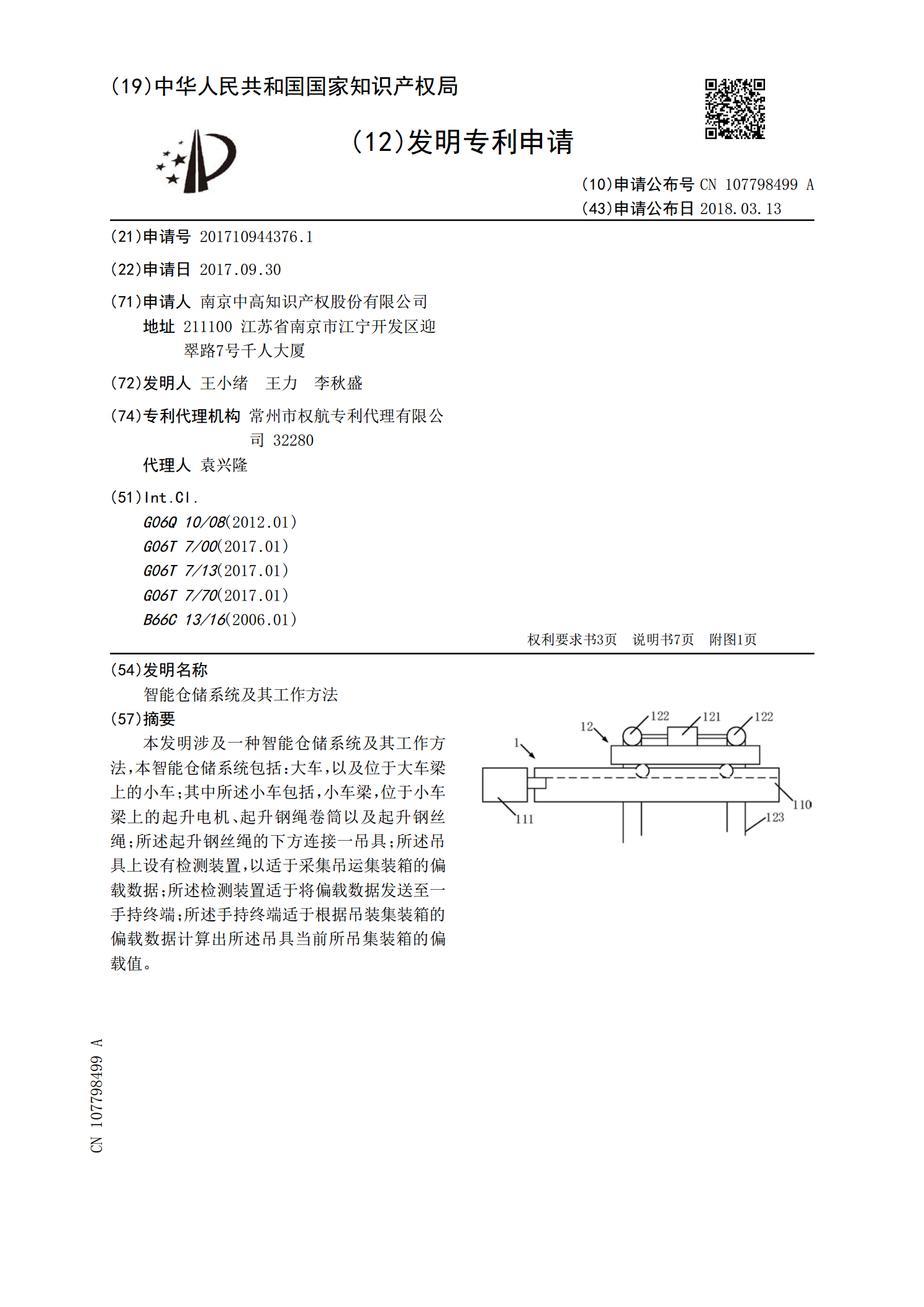
本发明涉及一种智能仓储系统及其工作方法,本智能仓储系统包括:大车,以及位于大车梁上的小车;其中所述小车包括,小车梁,位于小车梁上的起升电机、起升钢绳卷筒以及起升钢丝绳;所述起升钢丝绳的下方连接一吊具;所述吊具上设有检测装置,以适于采集吊运集装箱的偏载数据;所述检测装置适于将偏载数据发送至一手持终端;所述手持终端适于根据吊装集装箱的偏载数据计算出所述吊具当前所吊集装箱的偏载值。
一种智能仓储系统的工作方法.pdf
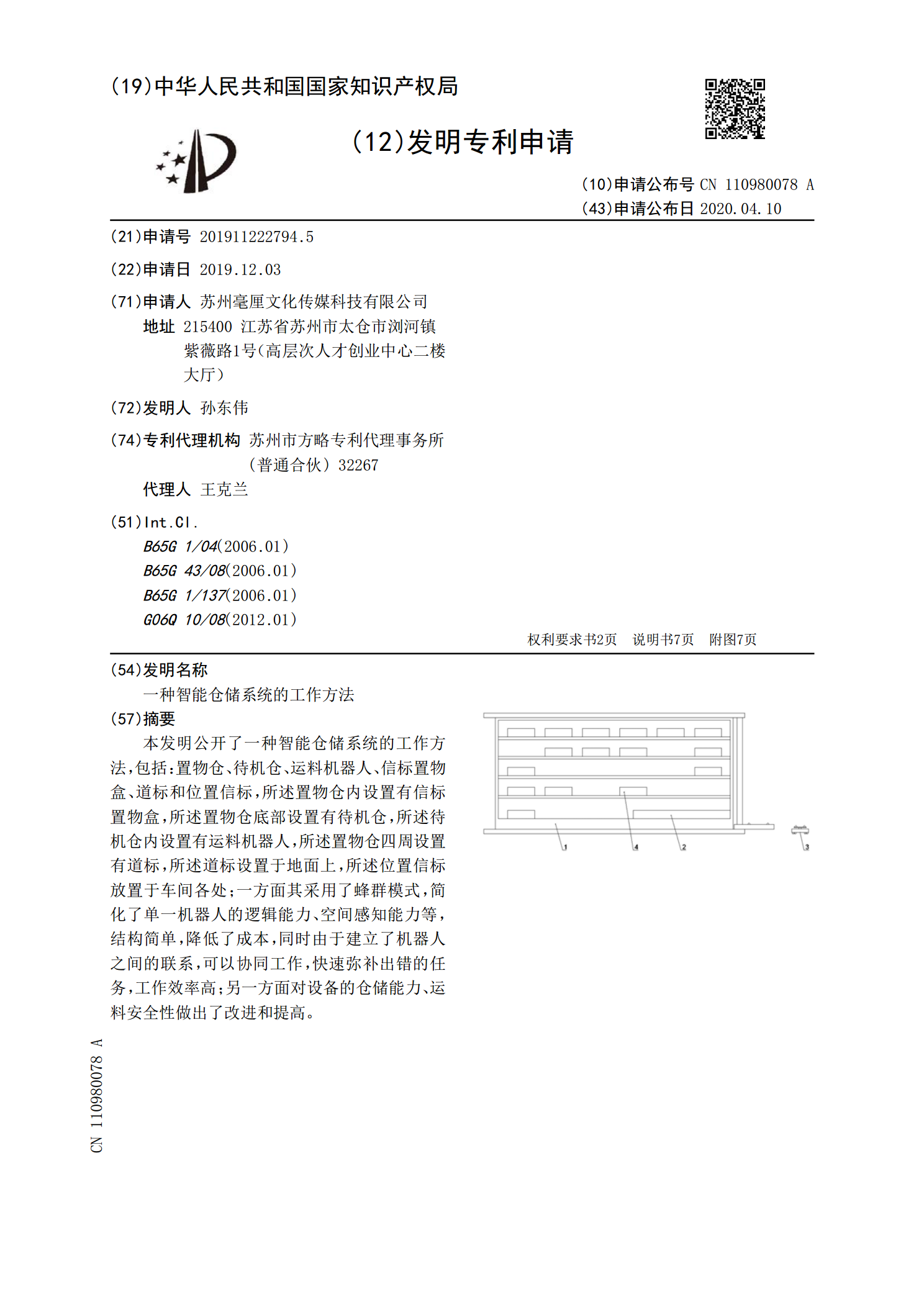
本发明公开了一种智能仓储系统的工作方法,包括:置物仓、待机仓、运料机器人、信标置物盒、道标和位置信标,所述置物仓内设置有信标置物盒,所述置物仓底部设置有待机仓,所述待机仓内设置有运料机器人,所述置物仓四周设置有道标,所述道标设置于地面上,所述位置信标放置于车间各处;一方面其采用了蜂群模式,简化了单一机器人的逻辑能力、空间感知能力等,结构简单,降低了成本,同时由于建立了机器人之间的联系,可以协同工作,快速弥补出错的任务,工作效率高;另一方面对设备的仓储能力、运料安全性做出了改进和提高。

智能足球裁判系统及其工作方法.pdf
智能足球裁判系统,包括身体轮廓扫描装置、摄像机、判决处理装置和带在裁判员身上的远程用户端,摄像机设置有多个,并安装在比赛场地的四周,判决处理装置内设置有微处理器和与其相连的无线通讯模块,身体轮廓扫描装置和摄像机都与微处理器相连,远程用户端内设置有无线通讯模块和与其相连的显示屏、扬声器和振动器,判决处理装置与远程用户端通过无线通讯模块之间通讯连接。智能足球裁判系统可根拒球员的身体轮廓和多角度的视频图像,建立准确的3D模型,判断球员之间是否有身体接触,确定球员的动作是否犯规,判罚准确,最大可能的保证了比赛的公

一种智能仓储机器人及其工作方法.pdf
本发明公开了一种智能仓储机器人及其工作方法。该机器人包括底座,所述底座底部设有摄像头和移动机构,所述底座左右两侧设有货架爬升装置,所述底座上设有驱动货架爬升装置张开/缩回的伸缩机构,所述底座顶部设有用于抓取物品的机械臂以及带动机械臂转动的转动机构,所述货架爬升装置包括支架、位于支架前后两端的链轮以及驱动链轮转动的驱动机构,所述底座上还设有控制器和无线通信模块,所述控制器分别与摄像头、移动机构、伸缩机构、机械臂、转动机构、驱动机构和无线通信模块电连接。本发明无需搬运整个货架,成本较低,货架尺寸不受限制,提高

一种用于智能物流的仓储堆垛设备及其工作方法.pdf
本发明公开了一种用于智能物流的仓储堆垛设备,包括放置架、箱体、驱动装置和第一升降装置,所述放置架的顶部设置有支撑装置,本发明涉及物流仓储技术领域。该用于智能物流的仓储堆垛设备,把箱体从运输箱上方移动到放置架内部的过程中,通过移动装置进运输,运输时,通过移动箱和多个支撑块对箱体进行支撑,移动装置的支撑宽度不小于放置架内支撑装置的支撑宽度,提高移动过程中,箱体的稳定,支撑块通过支撑轮与箱体接触,当完成箱体的堆垛时,支撑块朝靠近移动箱的方向移动,支撑轮保障支撑块移动时不会对箱体产生影响,从而保障在可以完成对箱体