
踏步机器的踏板路径.pdf

Th****84


1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
踏步机器的踏板路径.pdf
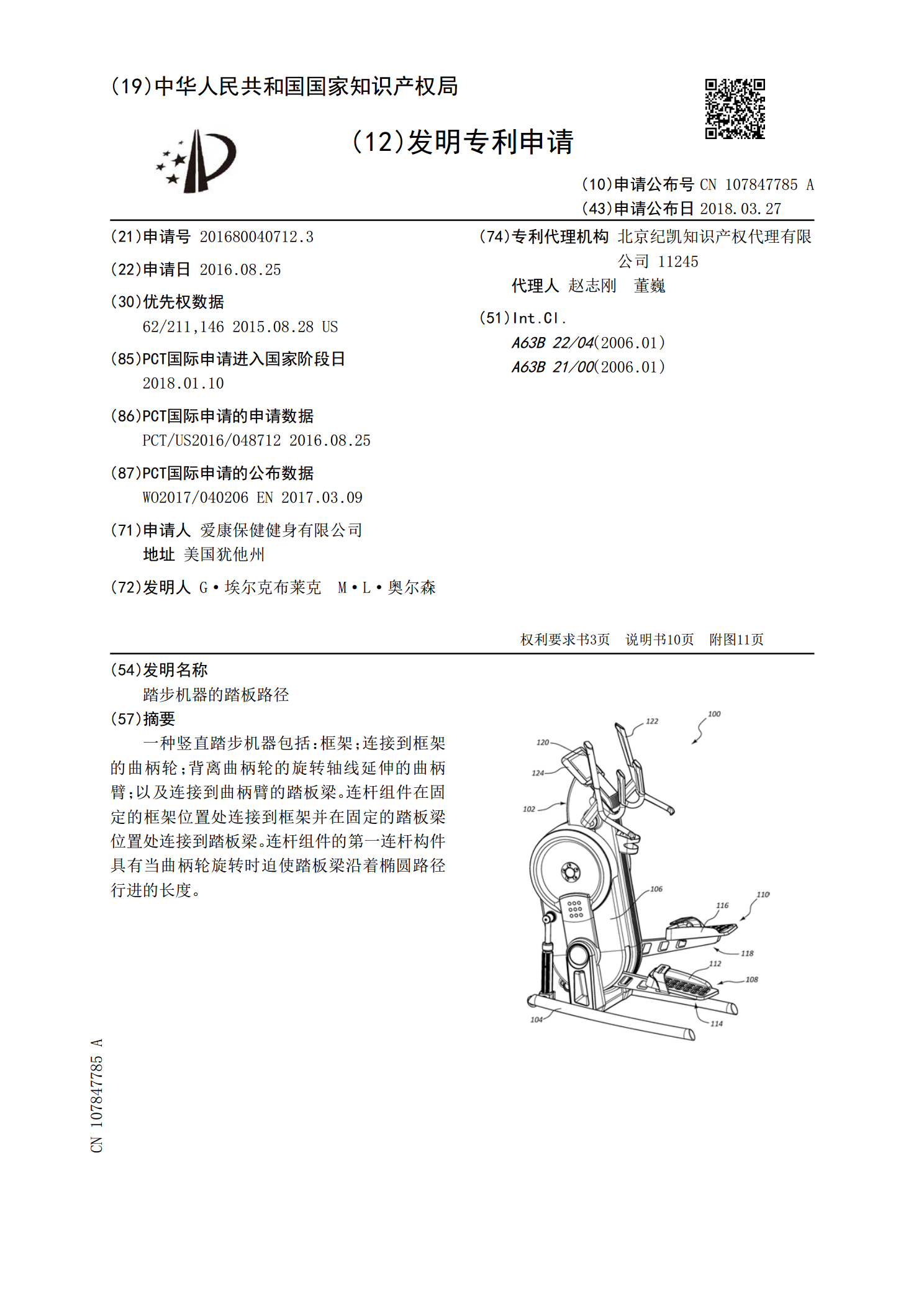
一种竖直踏步机器包括:框架;连接到框架的曲柄轮;背离曲柄轮的旋转轴线延伸的曲柄臂;以及连接到曲柄臂的踏板梁。连杆组件在固定的框架位置处连接到框架并在固定的踏板梁位置处连接到踏板梁。连杆组件的第一连杆构件具有当曲柄轮旋转时迫使踏板梁沿着椭圆路径行进的长度。

踏步机器的踏板路径.pdf
一种竖直踏步机器包括:框架;连接到框架的曲柄轮;连接到框架的曲柄轮;具有第一端和第二端的踏板梁,其中第一端与曲柄轮机械连通;连接到踏板梁的第二端的踏板;连接到框架和踏板梁的连杆组件;可旋转地连接到框架的臂支撑件;将臂支撑件连接到连杆组件的臂连杆;以及当竖直踏步机器处于直立取向时位于曲柄轮上方的旋转阻力机构。当曲柄轮旋转时踏板梁在椭圆路径中移动,并且当竖直踏步机器处于直立位置时椭圆路径具有竖直长轴线和水平短轴线。

服务机器人路径规划与路径跟踪.docx
服务机器人路径规划与路径跟踪摘要:服务机器人由于所处的环境不可能是完全确定的,使得机器人导航问题在服务型机器人应用中越发关键。本文讨论了环境部分未知的情况下的导航问题中的全局路径规划,根据环境中的静态已知障碍物利用蚁群算法找出全局最优路径,采用了链接图来建立环境全局地图,将工作空间转换为带权图的形式,然后使用蚁群算法对带权图进行搜索,得到从起始点到目标的一条全局最优路径。关键词:蚁群算法;路径跟踪;避障ServiceRobot'spathplanningandpathfollowingAbstract:B

踏板式步行训练机器人研究的任务书.docx
踏板式步行训练机器人研究的任务书任务书1.研究背景随着社会经济的发展和科技的进步,人们的生活节奏越来越快,久坐不动成为了很多人的生活常态,这对身体健康造成了很大的威胁。长时间久坐不动会导致肌肉萎缩,肥胖等一系列健康问题。为此,越来越多的人开始关注身体健康,而步行是一种简单易行的运动方式,步行训练机器人因此应运而生。在市场上已经有了很多种形式的步行训练机器人,但是目前还没有一种可以兼具锻炼和娱乐功能的机器人。同时,许多步行训练机器人在使用过程中存在一定的危险性,不够安全。因此,我们需要研发一种新型的、具有安

机器人路径规划.pdf
机器人路径规划随着科技的飞速发展,机器人已经渗透到我们生活的各个领域。在众多应用中,路径规划是机器人智能的关键组成部分。路径规划是指机器人通过某种算法,自主寻找从起点到终点的最优路径。它涉及到一系列复杂的数学和计算机科学概念,包括图论、优化理论和等。机器人路径规划可以定义为在一个有障碍物的环境中,寻找一条从起点到终点的最短或最优路径。这个过程需要解决的主要问题是如何在避免障碍物的同时,达到目标位置。这涉及到一系列的决策过程,包括决策树的建立、搜索策略的选择以及最优解的评估等。基于图的路径规划:这种方法将环