
一种三叶桨共轴式无人直升机桨距分控操纵系统.pdf

王秋****哥哥


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种三叶桨共轴式无人直升机桨距分控操纵系统.pdf
本发明公开一种三叶桨共轴式无人直升机桨距分控操纵系统,包括上旋翼操纵单元和下旋翼操纵单元,上旋翼伺服舵机将变距操纵传递给上旋翼倾斜器,上旋翼倾斜器外环与直升机机身相连,上旋翼倾斜器内环和上旋翼倾斜器外环保持相对转动,上旋翼倾斜器内环随着上旋翼的转轴转动,上旋翼倾斜器通过三角梁机构与上旋翼过渡环连接,并把变距操纵传递给上旋翼过渡环,上旋翼过渡环随着上旋翼的转轴转动并将变距操纵传递给上旋翼;下旋翼伺服舵机与下旋翼倾斜器连接,下旋翼倾斜器通过与下旋翼连接,下旋翼倾斜器内环随下旋翼的转轴一起转动,下旋翼倾斜器外环

2017114062238一种共轴双桨直升机桨距操纵系统.pdf
(19)中华人民共和国国家知识产权局(12)发明专利(10)授权公告号CN108116673B(45)授权公告日2020.06.02(21)申请号201711406223.8(51)Int.Cl.(22)申请日2017.12.22B64C27/10(2006.01)(65)同一申请的已公布的文献号(56)对比文件申请公布号CN108116673ACN104527975A,2015.04.22,CN104554717A,2015.04.29,(43)申请公布日2018.06.05RU2155702C1,20

2014102757904一种共轴双桨直升机中置桨距控制装置.pdf
(19)中华人民共和国国家知识产权局(12)发明专利(10)授权公告号CN105270617B(45)授权公告日2017.06.06(21)申请号201410275790.4(22)申请日2014.06.19(65)同一申请的已公布的文献号申请公布号CN105270617A(43)申请公布日2016.01.27(73)专利权人庆安集团有限公司地址710077陕西省西安市20号信箱(72)发明人戴梦漪(74)专利代理机构中国航空专利中心11008代理人张毓灵(51)Int.Cl.B64C27/10(2006

复合式双桨共轴无人直升机布局的优势.doc
复合式双桨共轴无人直升机布局的优点复合式双桨共轴直升机布局的优点很多:复合了尾桨的共轴直升机使飞行时多了一份安全的保障。由于上下旋翼反向旋转,形成了直升机水平方向的力矩平衡,所以双桨共轴直升机可不需要尾桨来平衡直升机水平方向上的力矩。前苏军在阿富汗的作战经验表明,作战中损失的苏军直升机有30%与尾桨有关,主要是:尾桨的弹伤或异物损伤;承载的尾梁损伤;长距离的尾桨传动轴系损伤等。共轴式直升机的设计师直升机的升力产生与尾桨有关的损伤无缘,同时复合的尾桨角度为0度,飞行是可以大大节省尾桨所耗用的额外功率。即使在
一种三叶桨大载重纵列式无人直升机.pdf
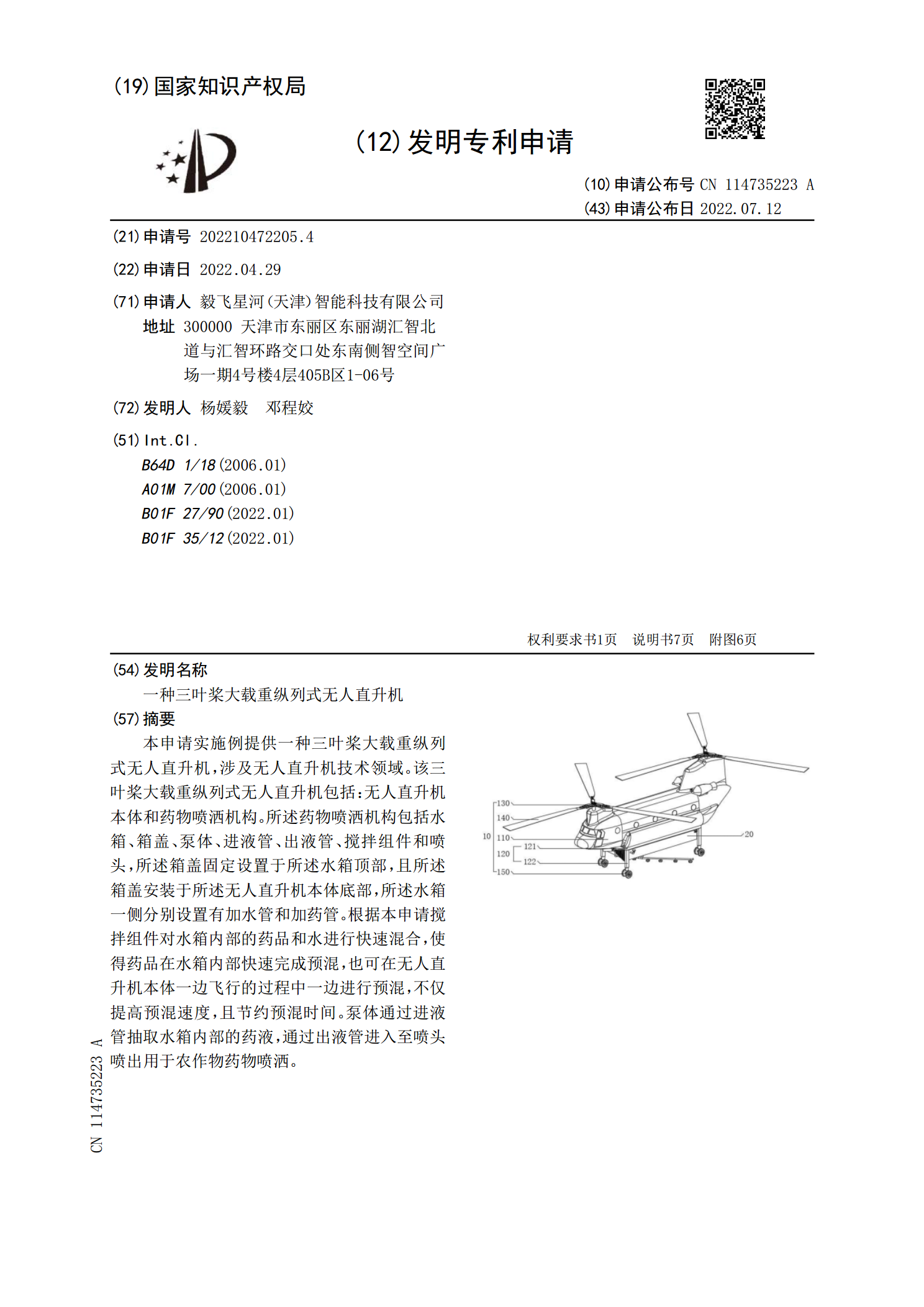
本申请实施例提供一种三叶桨大载重纵列式无人直升机,涉及无人直升机技术领域。该三叶桨大载重纵列式无人直升机包括:无人直升机本体和药物喷洒机构。所述药物喷洒机构包括水箱、箱盖、泵体、进液管、出液管、搅拌组件和喷头,所述箱盖固定设置于所述水箱顶部,且所述箱盖安装于所述无人直升机本体底部,所述水箱一侧分别设置有加水管和加药管。根据本申请搅拌组件对水箱内部的药品和水进行快速混合,使得药品在水箱内部快速完成预混,也可在无人直升机本体一边飞行的过程中一边进行预混,不仅提高预混速度,且节约预混时间。泵体通过进液管抽取水箱