
基于视频图像的桥梁裂缝监测系统.pdf

Ro****44

1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于视频图像的桥梁裂缝监测系统.pdf
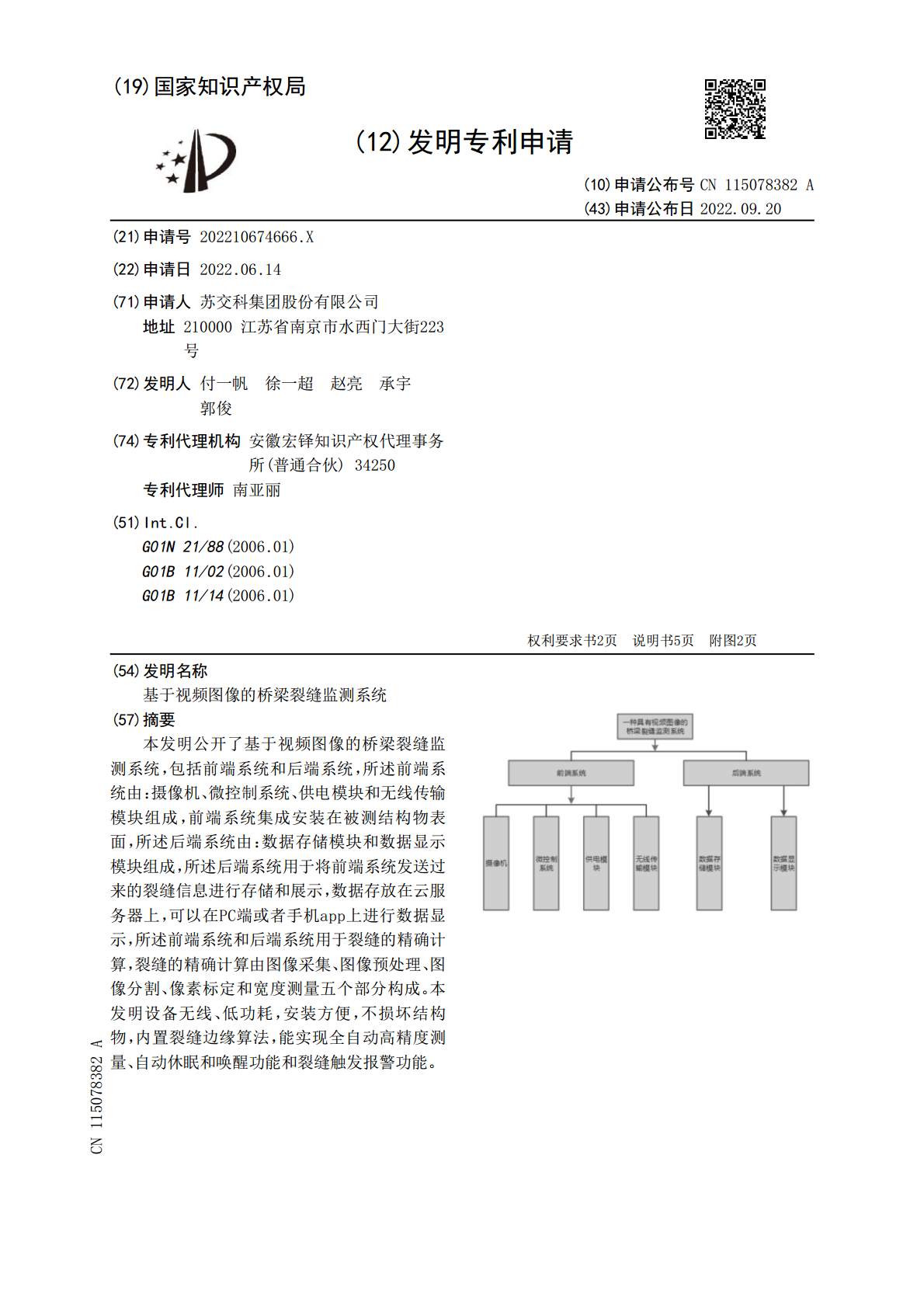
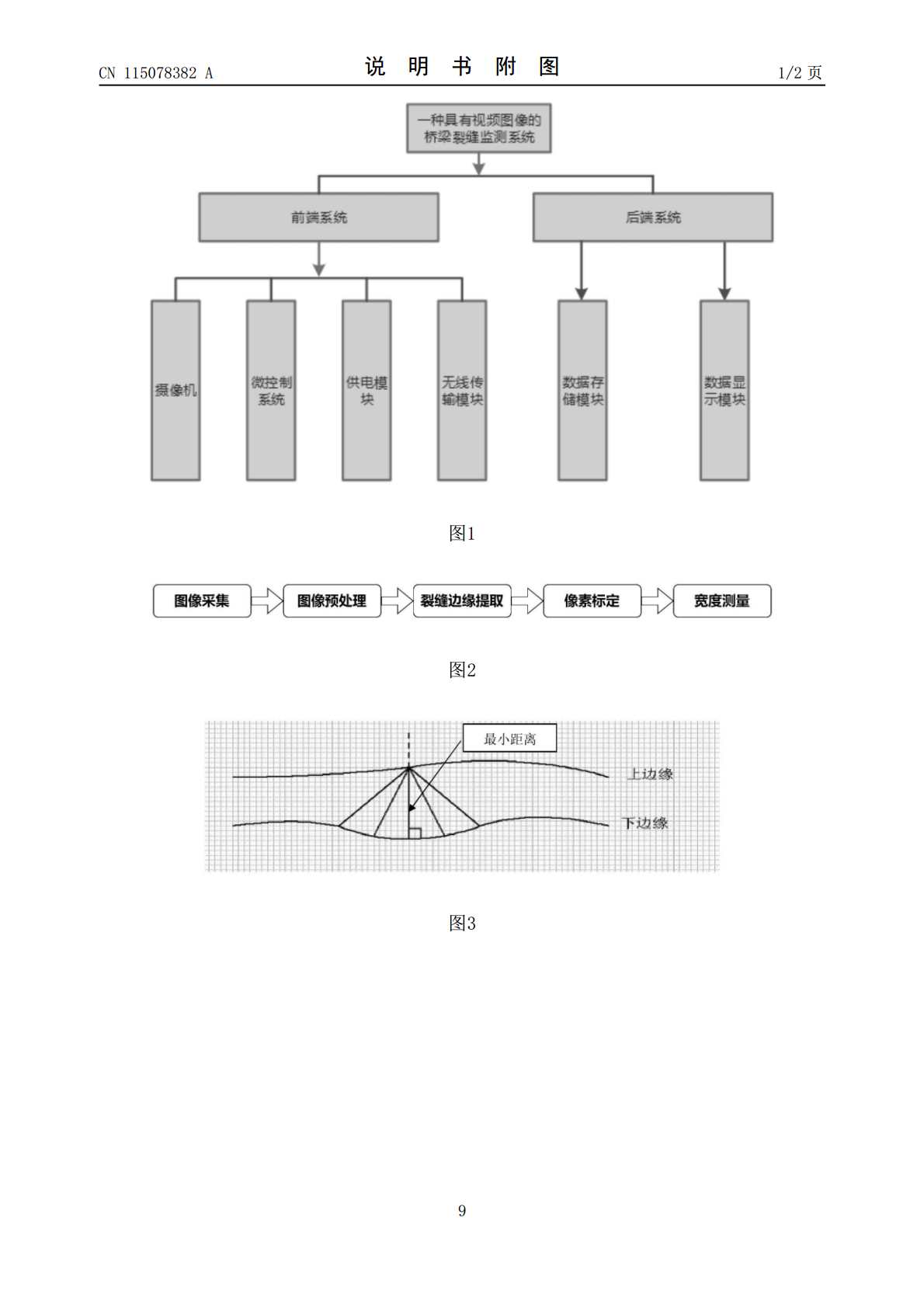
本发明公开了基于视频图像的桥梁裂缝监测系统,包括前端系统和后端系统,所述前端系统由:摄像机、微控制系统、供电模块和无线传输模块组成,前端系统集成安装在被测结构物表面,所述后端系统由:数据存储模块和数据显示模块组成,所述后端系统用于将前端系统发送过来的裂缝信息进行存储和展示,数据存放在云服务器上,可以在PC端或者手机app上进行数据显示,所述前端系统和后端系统用于裂缝的精确计算,裂缝的精确计算由图像采集、图像预处理、图像分割、像素标定和宽度测量五个部分构成。本发明设备无线、低功耗,安装方便,不损坏结构物,内
基于视频图像的桥梁监测装置、系统及方法.pdf
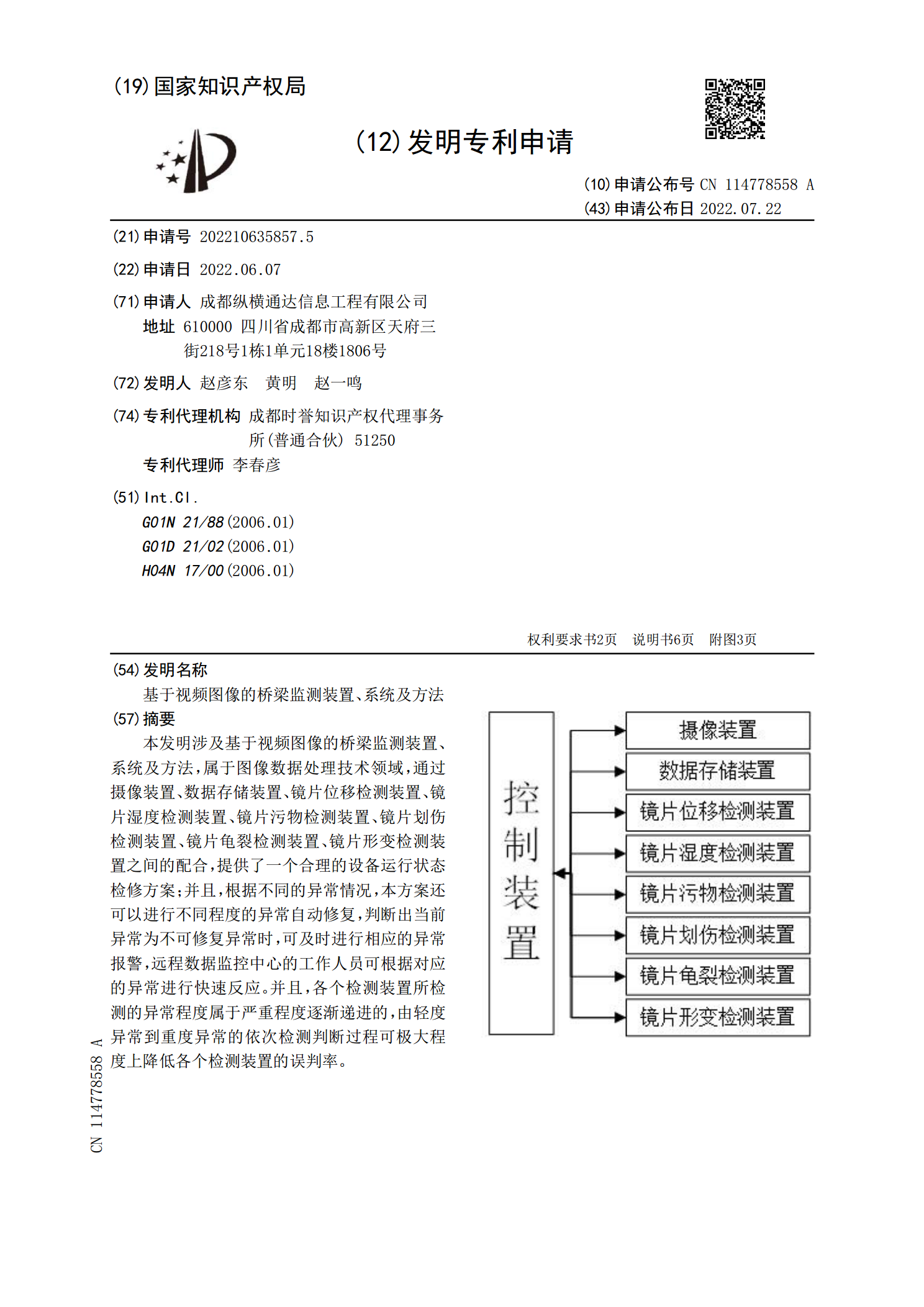
本发明涉及基于视频图像的桥梁监测装置、系统及方法,属于图像数据处理技术领域,通过摄像装置、数据存储装置、镜片位移检测装置、镜片湿度检测装置、镜片污物检测装置、镜片划伤检测装置、镜片龟裂检测装置、镜片形变检测装置之间的配合,提供了一个合理的设备运行状态检修方案;并且,根据不同的异常情况,本方案还可以进行不同程度的异常自动修复,判断出当前异常为不可修复异常时,可及时进行相应的异常报警,远程数据监控中心的工作人员可根据对应的异常进行快速反应。并且,各个检测装置所检测的异常程度属于严重程度逐渐递进的,由轻度异常到

基于图像处理技术的桥梁裂缝测量系统研究.docx
基于图像处理技术的桥梁裂缝测量系统研究摘要:现代桥梁系统承担着越来越重要的交通运输和物资流通任务。长期的使用和环境因素的影响可能导致桥梁出现裂缝,从而危及公众的安全。因此,研究开发一种准确可靠的桥梁裂缝测量系统至关重要。本文基于图像处理技术,设计了一种桥梁裂缝测量系统,可以精确测量桥梁裂缝的尺寸和形态,提供重要的信息用于桥梁的维护和修复。关键词:桥梁裂缝测量,图像处理,维护和修复引言:桥梁是现代交通和通信的基础设施之一,承载着人们的出行和物资的流通。然而,长期的使用和自然环境的影响可能导致桥梁出现裂缝,从
基于视频分析的桥梁防撞监测系统.pdf
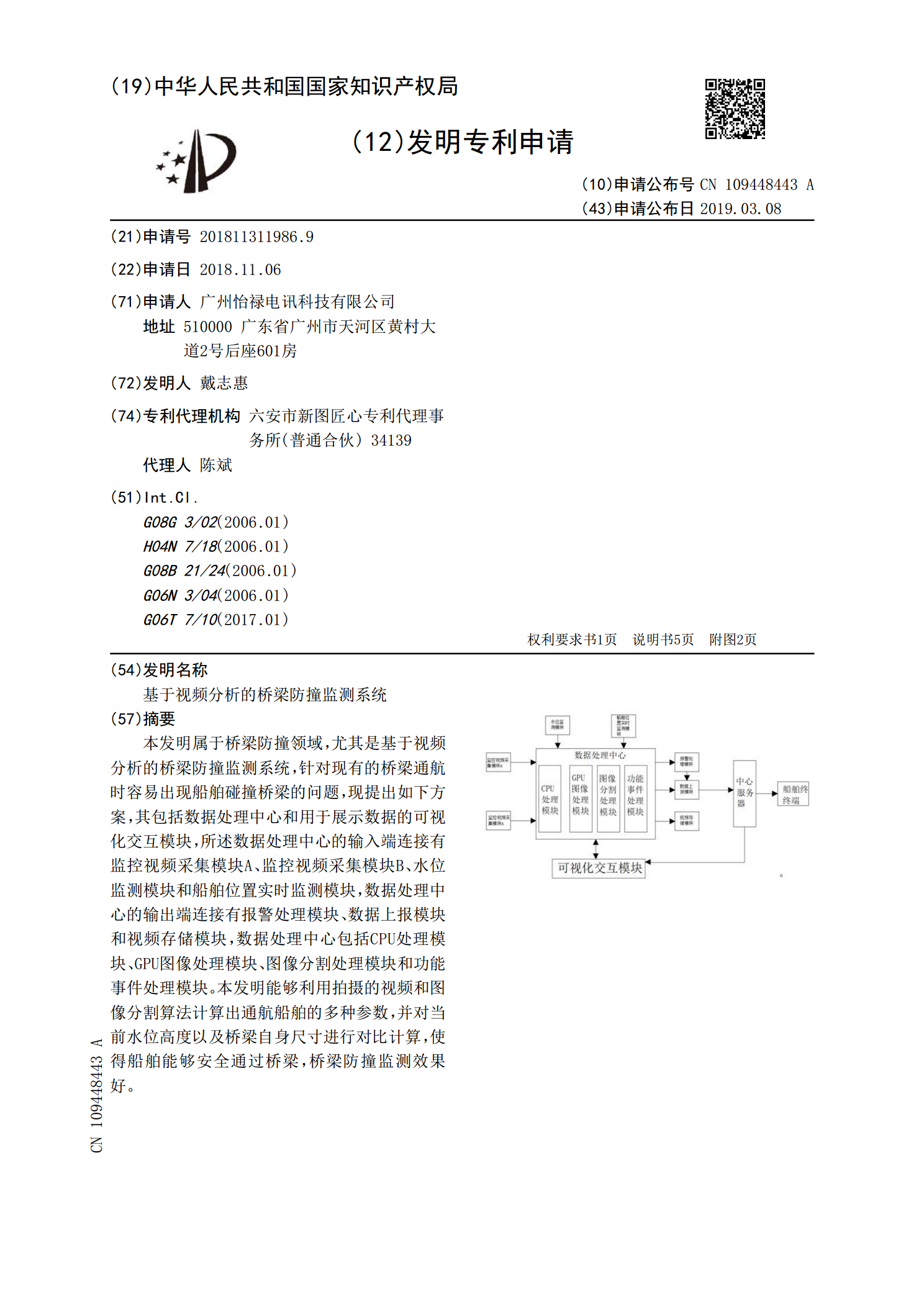
本发明属于桥梁防撞领域,尤其是基于视频分析的桥梁防撞监测系统,针对现有的桥梁通航时容易出现船舶碰撞桥梁的问题,现提出如下方案,其包括数据处理中心和用于展示数据的可视化交互模块,所述数据处理中心的输入端连接有监控视频采集模块A、监控视频采集模块B、水位监测模块和船舶位置实时监测模块,数据处理中心的输出端连接有报警处理模块、数据上报模块和视频存储模块,数据处理中心包括CPU处理模块、GPU图像处理模块、图像分割处理模块和功能事件处理模块。本发明能够利用拍摄的视频和图像分割算法计算出通航船舶的多种参数,并对当前

基于图像处理的桥梁混凝土裂缝检测研究进展.docx
基于图像处理的桥梁混凝土裂缝检测研究进展随着交通工具的不断发展,桥梁作为连接道路和城市的重要组成部分扮演着越来越重要的角色。然而,桥梁的质量问题是一个挑战。混凝土裂缝是桥梁结构的主要疾病之一,会严重影响桥梁寿命和安全。因此,快速而准确的检测桥梁混凝土裂缝是至关重要的。而图像处理技术作为一种高精度、高效率、非接触、自动化的技术,已经成为桥梁混凝土裂缝检测的关键技术之一。本文将对现有的图像处理技术在桥梁混凝土裂缝检测中的研究进展进行综述与分析,并且对未来的研究方向和发展趋势进行展望。一、早期的桥梁混凝土裂缝检