
悬浮导向系统的验证方法、装置、设备及可读存储介质.pdf

依波****bc


1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
悬浮导向系统的验证方法、装置、设备及可读存储介质.pdf
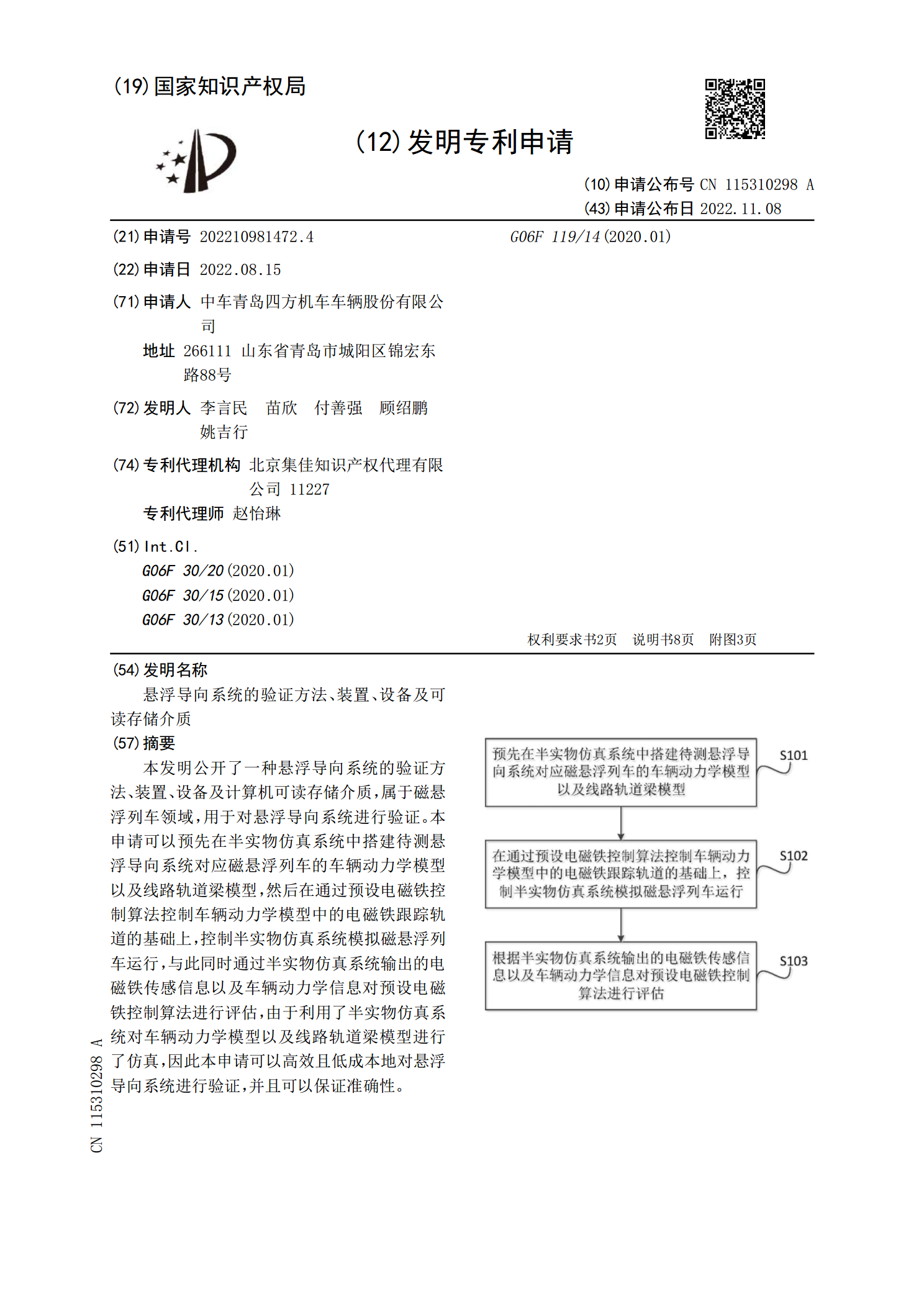
本发明公开了一种悬浮导向系统的验证方法、装置、设备及计算机可读存储介质,属于磁悬浮列车领域,用于对悬浮导向系统进行验证。本申请可以预先在半实物仿真系统中搭建待测悬浮导向系统对应磁悬浮列车的车辆动力学模型以及线路轨道梁模型,然后在通过预设电磁铁控制算法控制车辆动力学模型中的电磁铁跟踪轨道的基础上,控制半实物仿真系统模拟磁悬浮列车运行,与此同时通过半实物仿真系统输出的电磁铁传感信息以及车辆动力学信息对预设电磁铁控制算法进行评估,由于利用了半实物仿真系统对车辆动力学模型以及线路轨道梁模型进行了仿真,因此本申请可
信息验证方法、装置、设备及可读存储介质.pdf
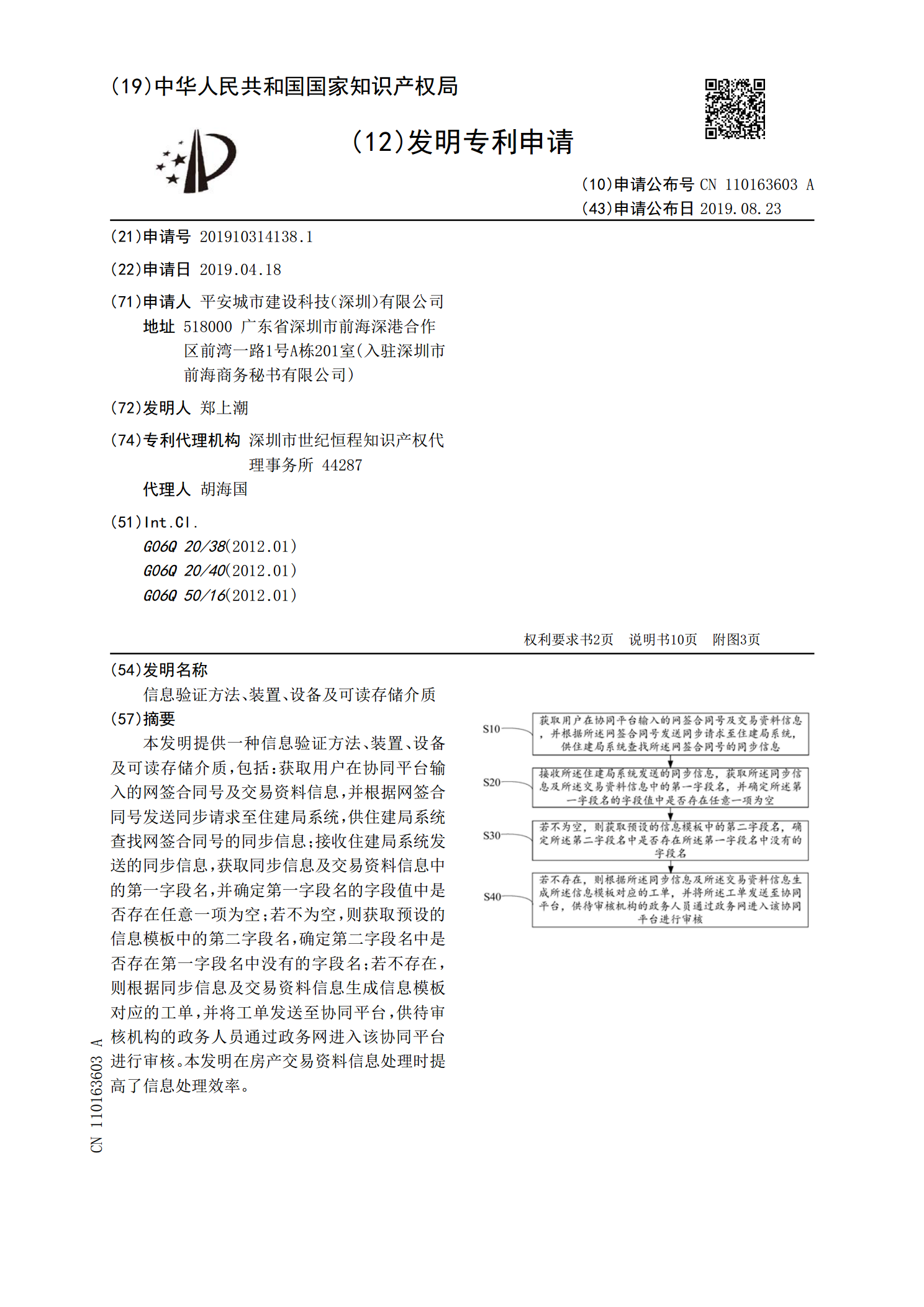
本发明提供一种信息验证方法、装置、设备及可读存储介质,包括:获取用户在协同平台输入的网签合同号及交易资料信息,并根据网签合同号发送同步请求至住建局系统,供住建局系统查找网签合同号的同步信息;接收住建局系统发送的同步信息,获取同步信息及交易资料信息中的第一字段名,并确定第一字段名的字段值中是否存在任意一项为空;若不为空,则获取预设的信息模板中的第二字段名,确定第二字段名中是否存在第一字段名中没有的字段名;若不存在,则根据同步信息及交易资料信息生成信息模板对应的工单,并将工单发送至协同平台,供待审核机构的政务
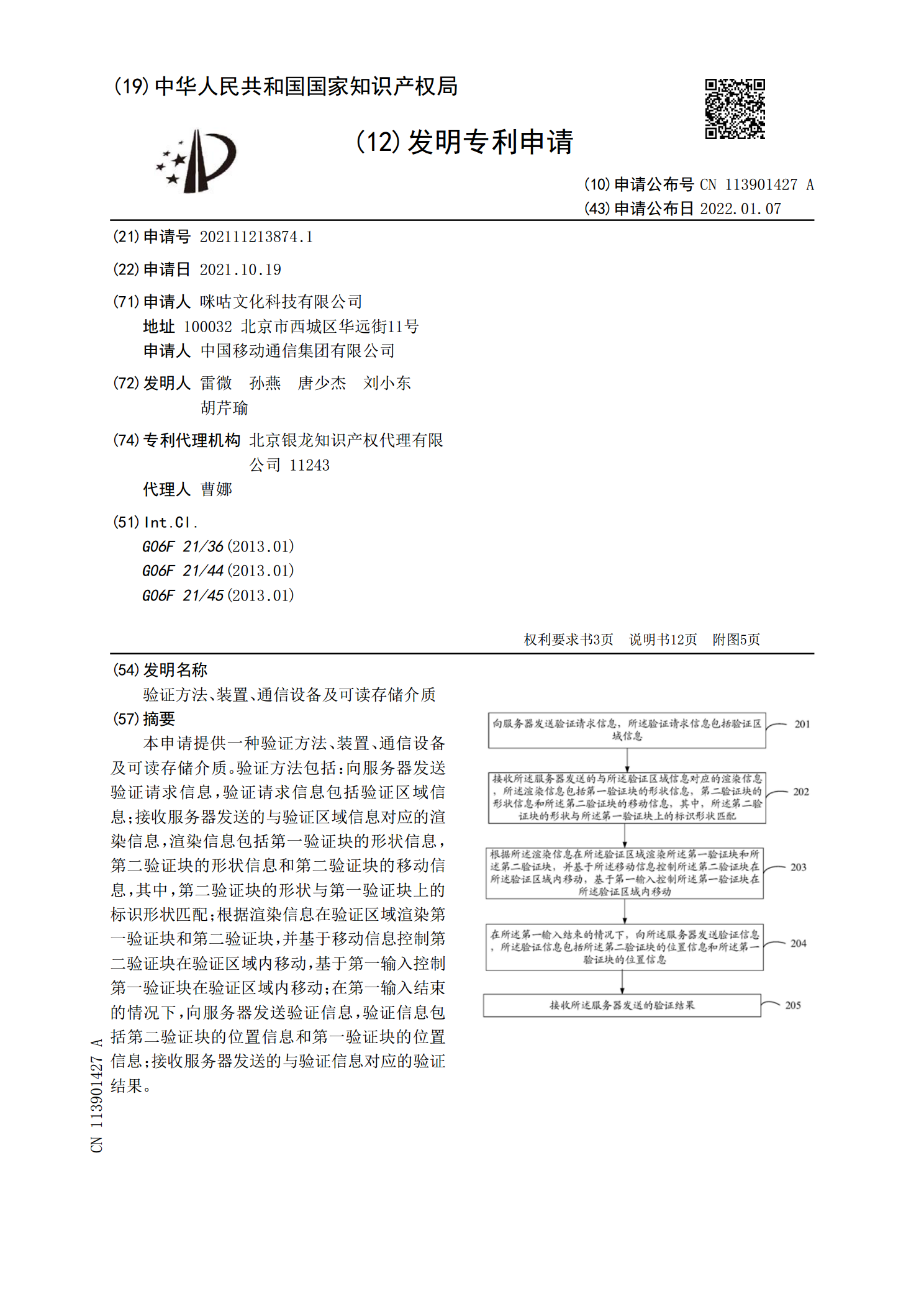
验证方法、装置、通信设备及可读存储介质.pdf
本申请提供一种验证方法、装置、通信设备及可读存储介质。验证方法包括:向服务器发送验证请求信息,验证请求信息包括验证区域信息;接收服务器发送的与验证区域信息对应的渲染信息,渲染信息包括第一验证块的形状信息,第二验证块的形状信息和第二验证块的移动信息,其中,第二验证块的形状与第一验证块上的标识形状匹配;根据渲染信息在验证区域渲染第一验证块和第二验证块,并基于移动信息控制第二验证块在验证区域内移动,基于第一输入控制第一验证块在验证区域内移动;在第一输入结束的情况下,向服务器发送验证信息,验证信息包括第二验证块的
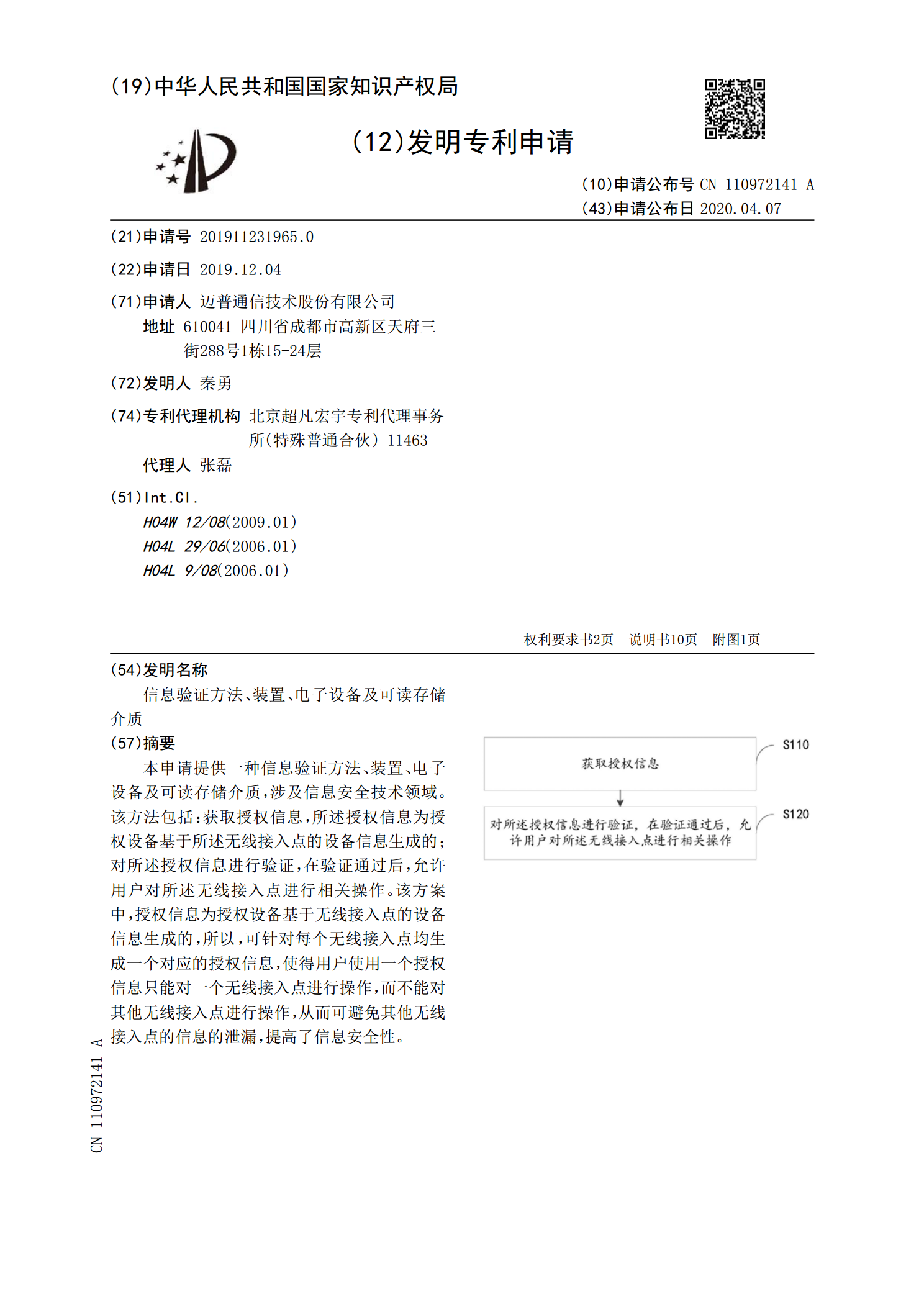
信息验证方法、装置、电子设备及可读存储介质.pdf
本申请提供一种信息验证方法、装置、电子设备及可读存储介质,涉及信息安全技术领域。该方法包括:获取授权信息,所述授权信息为授权设备基于所述无线接入点的设备信息生成的;对所述授权信息进行验证,在验证通过后,允许用户对所述无线接入点进行相关操作。该方案中,授权信息为授权设备基于无线接入点的设备信息生成的,所以,可针对每个无线接入点均生成一个对应的授权信息,使得用户使用一个授权信息只能对一个无线接入点进行操作,而不能对其他无线接入点进行操作,从而可避免其他无线接入点的信息的泄漏,提高了信息安全性。

密钥验证方法、设备及可读存储介质.pdf
本申请公开了一种密钥验证方法、设备及可读存储介质,该方法包括步骤:获取通过密码机设备证书的私钥对证书请求文件数字签名后得到私钥证明证书,其中,所述证书请求文件中记载有待验证密钥的信息,所述私钥证明证书记载有生成所述待验证密钥的目标密码机信息;验证私钥证明证书与证书请求文件是否均由待验证密钥生成,若是,则显示待验证密钥由密码机生成的第一信息;获取并验证私钥证明证书的证书信任链,若证书信任链验证通过,则显示验证成功的第二信息,基于第一信息和第二信息,确定待验证密钥由目标密码机生成,输出密钥验证通过的信息;通过