
一种基于电磁驱动原理的可控脱线爬行机器人.pdf

书生****写意


1/10
2/10
3/10
4/10

5/10
6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于电磁驱动原理的可控脱线爬行机器人.pdf
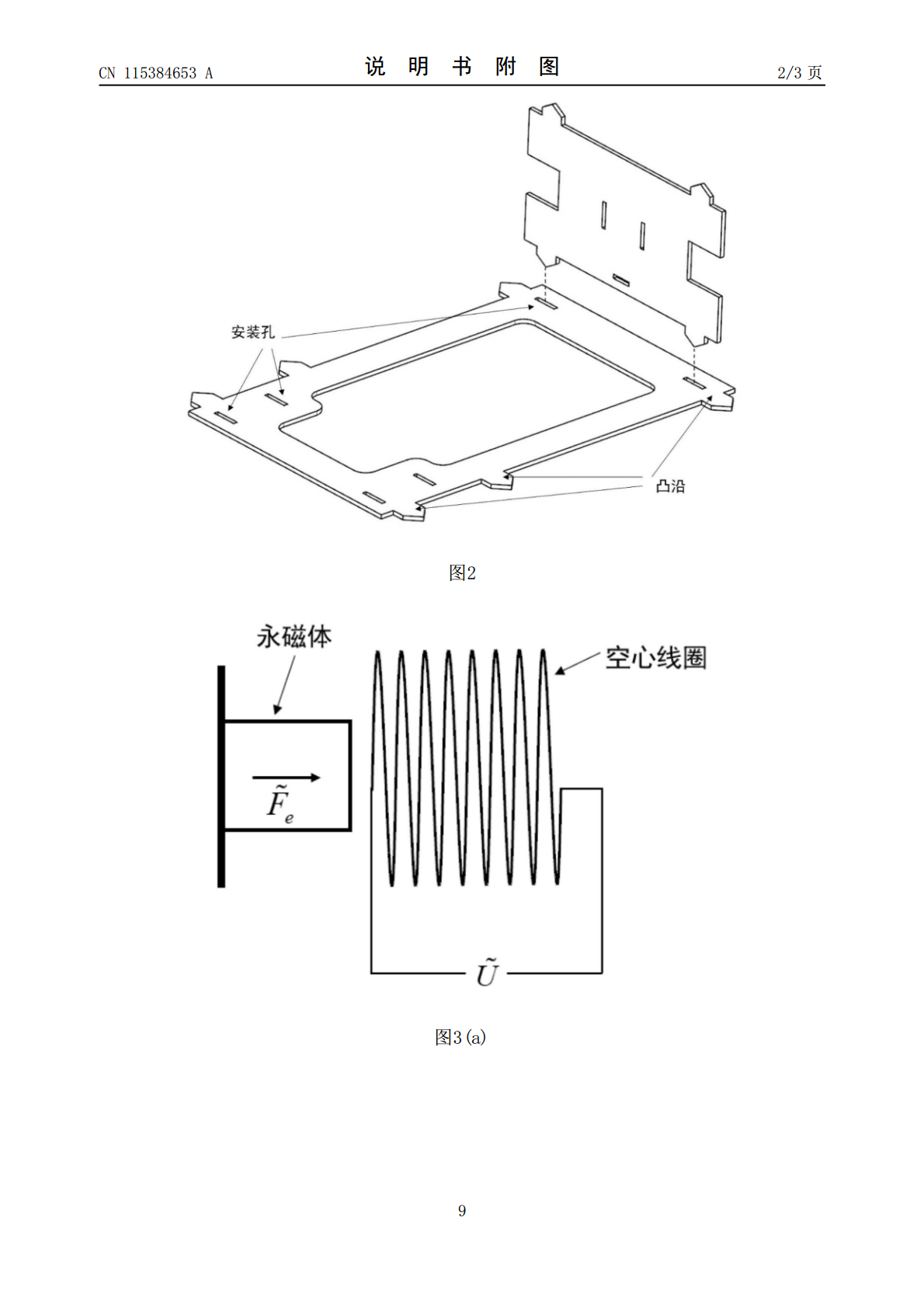
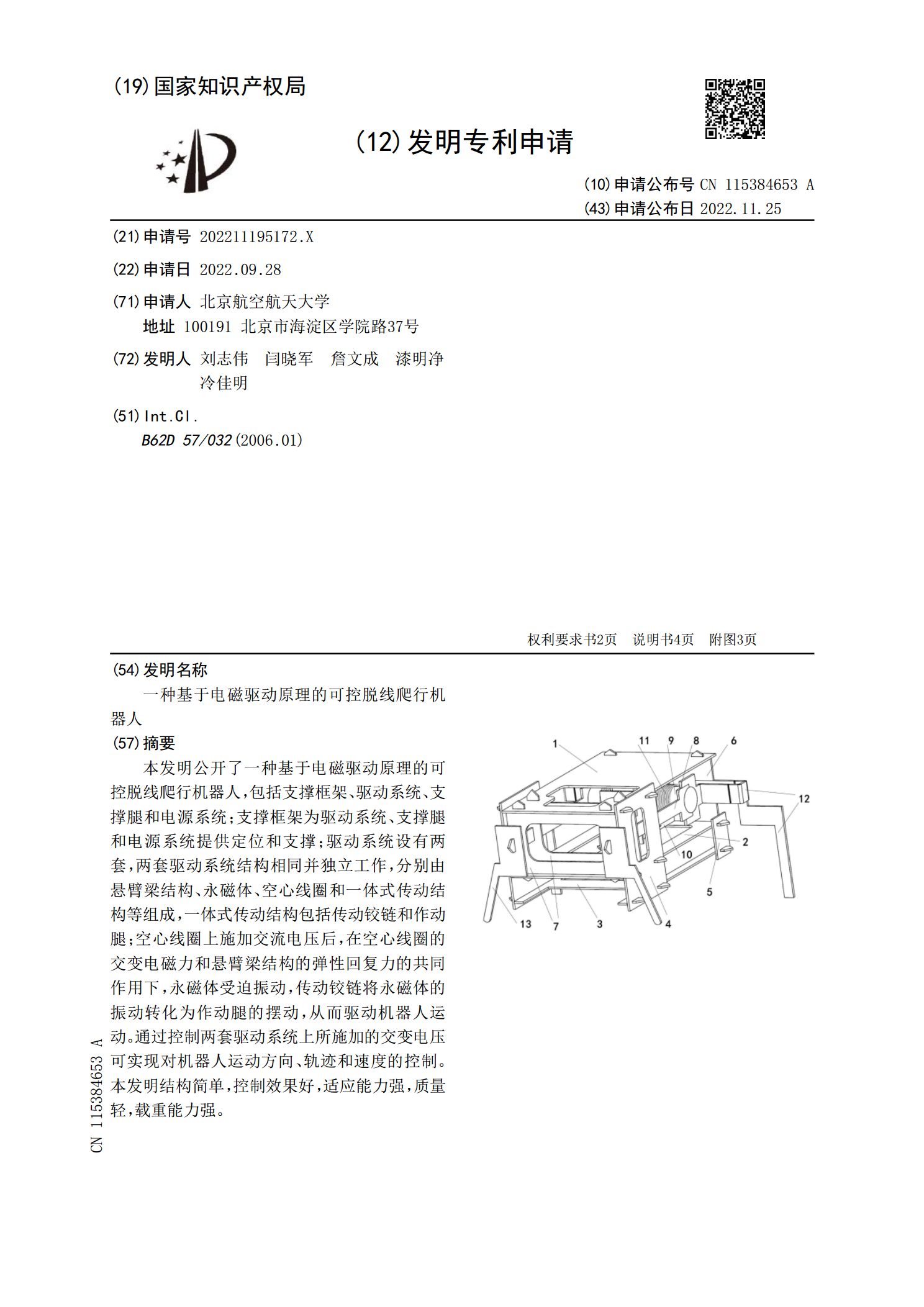
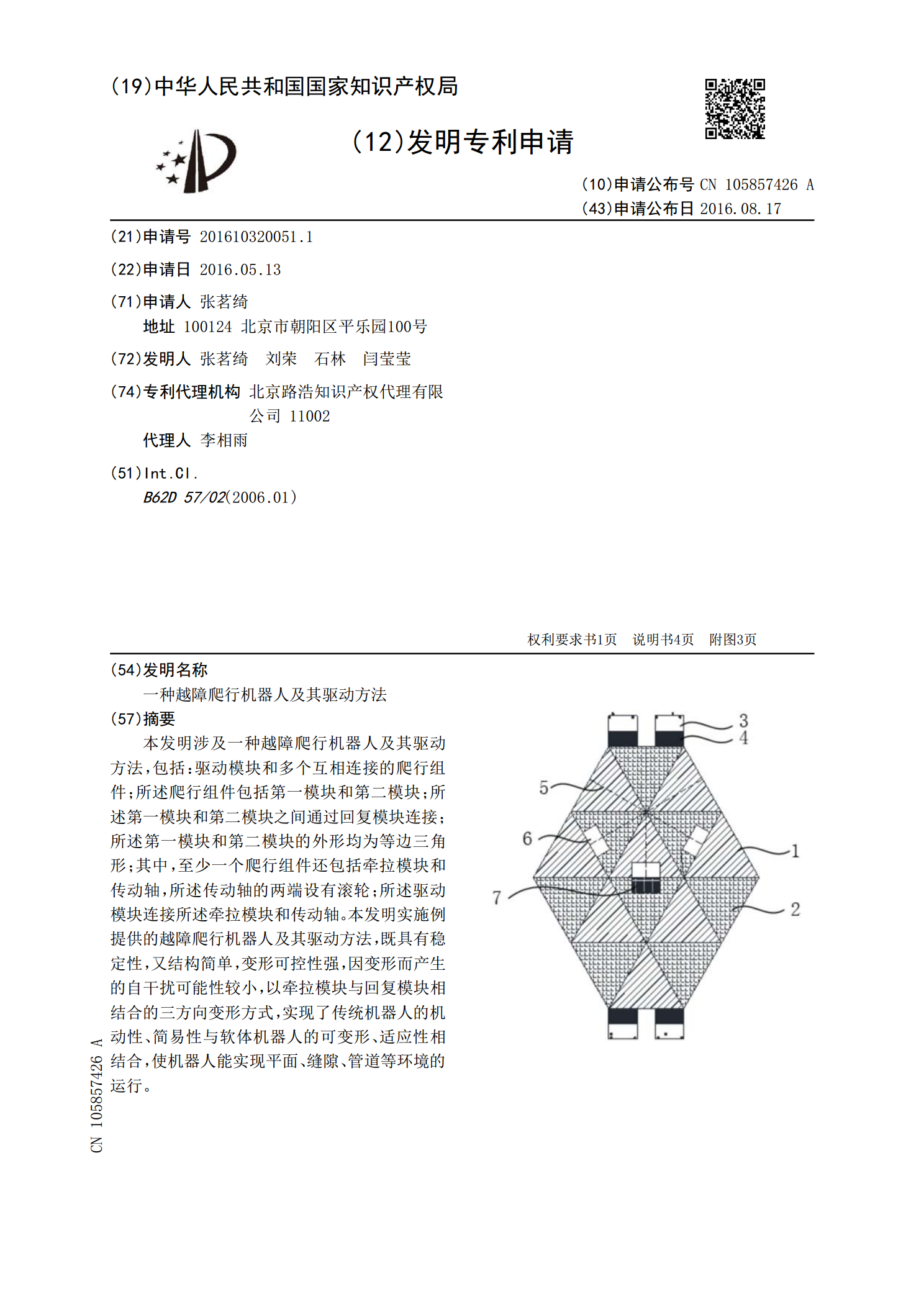
本发明公开了一种基于电磁驱动原理的可控脱线爬行机器人,包括支撑框架、驱动系统、支撑腿和电源系统;支撑框架为驱动系统、支撑腿和电源系统提供定位和支撑;驱动系统设有两套,两套驱动系统结构相同并独立工作,分别由悬臂梁结构、永磁体、空心线圈和一体式传动结构等组成,一体式传动结构包括传动铰链和作动腿;空心线圈上施加交流电压后,在空心线圈的交变电磁力和悬臂梁结构的弹性回复力的共同作用下,永磁体受迫振动,传动铰链将永磁体的振动转化为作动腿的摆动,从而驱动机器人运动。通过控制两套驱动系统上所施加的交变电压可实现对机器人运

一种基于形状可重构屈曲梁驱动的爬行机器人.pdf
一种基于形状可重构屈曲梁驱动的爬行机器人,涉及一种爬行机器人。爬行腿由圆柱体腿部和L形滑块组成,两个圆柱体腿部布置在负载平台两侧,侧壁沿轴向凹设滑槽,滑槽边缘设置n个带孔凸起,两个L形滑块短端部滑动放置在对应的滑槽内,长端部设置与圆柱体腿部数量相等并错位排布的带孔凸起,薄壁梁包括并列排布的2n个窄条梁,窄条梁一端形成公共端部与负载平台固连,另一端设置接孔形成离散端部与对应的带孔凸起铰接,控制模块控制两个L形滑块的相对位移,进而使薄壁梁侧向屈曲变形实现爬行腿水平和竖直方向的位置变化。采用薄壁梁作为柔性结构,
一种越障爬行机器人及其驱动方法.pdf
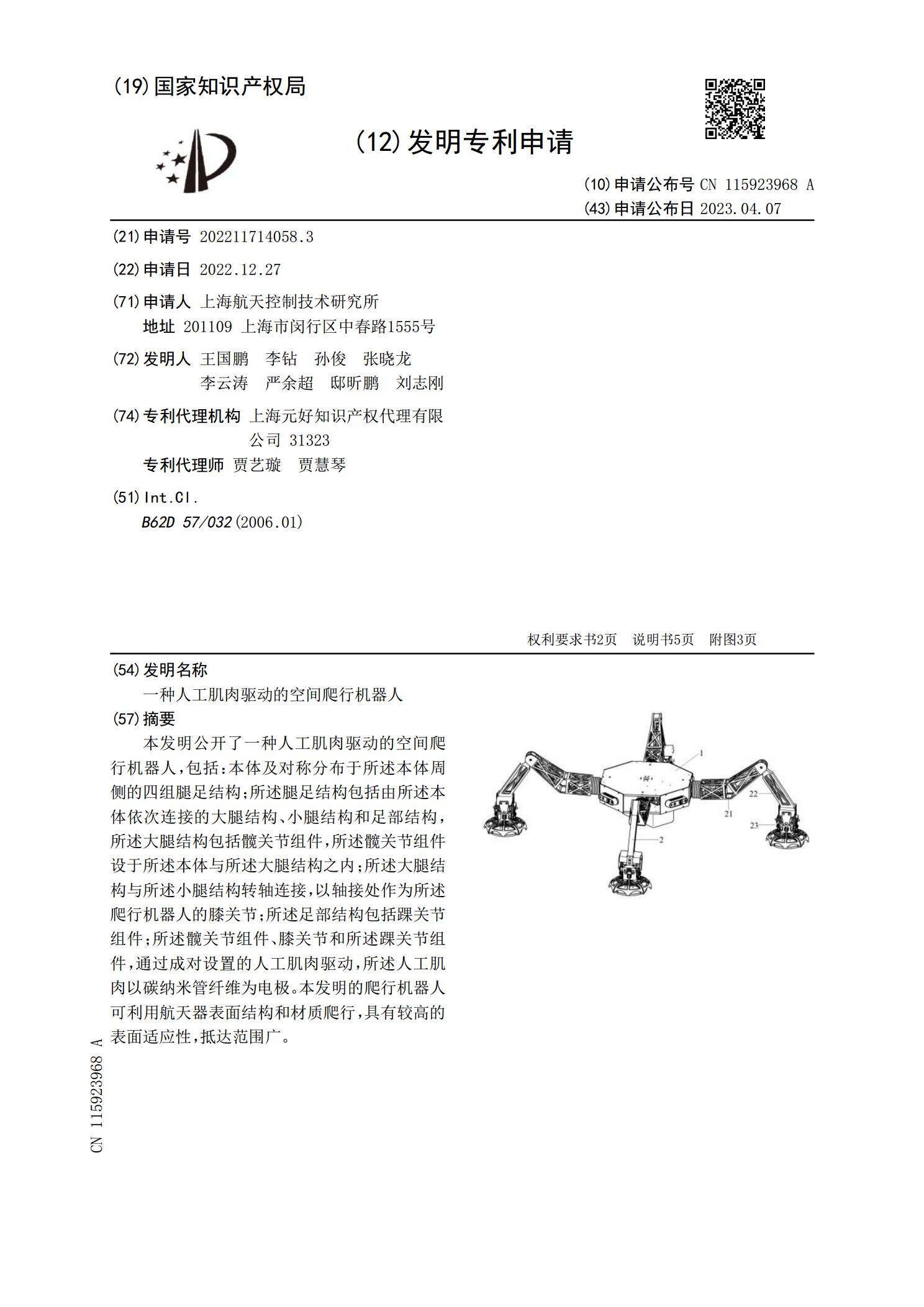
本发明涉及一种越障爬行机器人及其驱动方法,包括:驱动模块和多个互相连接的爬行组件;所述爬行组件包括第一模块和第二模块;所述第一模块和第二模块之间通过回复模块连接;所述第一模块和第二模块的外形均为等边三角形;其中,至少一个爬行组件还包括牵拉模块和传动轴,所述传动轴的两端设有滚轮;所述驱动模块连接所述牵拉模块和传动轴。本发明实施例提供的越障爬行机器人及其驱动方法,既具有稳定性,又结构简单,变形可控性强,因变形而产生的自干扰可能性较小,以牵拉模块与回复模块相结合的三方向变形方式,实现了传统机器人的机动性、简易性

一种形状记忆合金驱动的爬行机器人.pdf
本发明公开了一种基于形状记忆合金驱动的爬行机器人。机器人足部的轮子由硅胶材料制作而成,利用形状记忆合金集成性高、输出功重比大的特点,将形状记忆合金丝作为机器人的驱动器。提升机器人的运动效率、环境适应能力,为机器人设计了具有防滑作用的棘轮结构,在记忆合金丝的驱动下,机器人的足部能实现较高效率的运动。机器人的前后躯干由具有刚性的压簧连接,在躯干部位的记忆合金丝的作用下,机器人的躯干能实现躯干弯曲、转向等行为。在机器人的躯干部位布置了具有电阻反馈的记忆合金丝,能作为机器人的运动姿态传感器为机器人的闭环控制提供运
一种人工肌肉驱动的空间爬行机器人.pdf
本发明公开了一种人工肌肉驱动的空间爬行机器人,包括:本体及对称分布于所述本体周侧的四组腿足结构;所述腿足结构包括由所述本体依次连接的大腿结构、小腿结构和足部结构,所述大腿结构包括髋关节组件,所述髋关节组件设于所述本体与所述大腿结构之内;所述大腿结构与所述小腿结构转轴连接,以轴接处作为所述爬行机器人的膝关节;所述足部结构包括踝关节组件;所述髋关节组件、膝关节和所述踝关节组件,通过成对设置的人工肌肉驱动,所述人工肌肉以碳纳米管纤维为电极。本发明的爬行机器人可利用航天器表面结构和材质爬行,具有较高的表面适应性,