
一种新型越障攀爬机器人.pdf

是浩****32


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种新型越障攀爬机器人.pdf
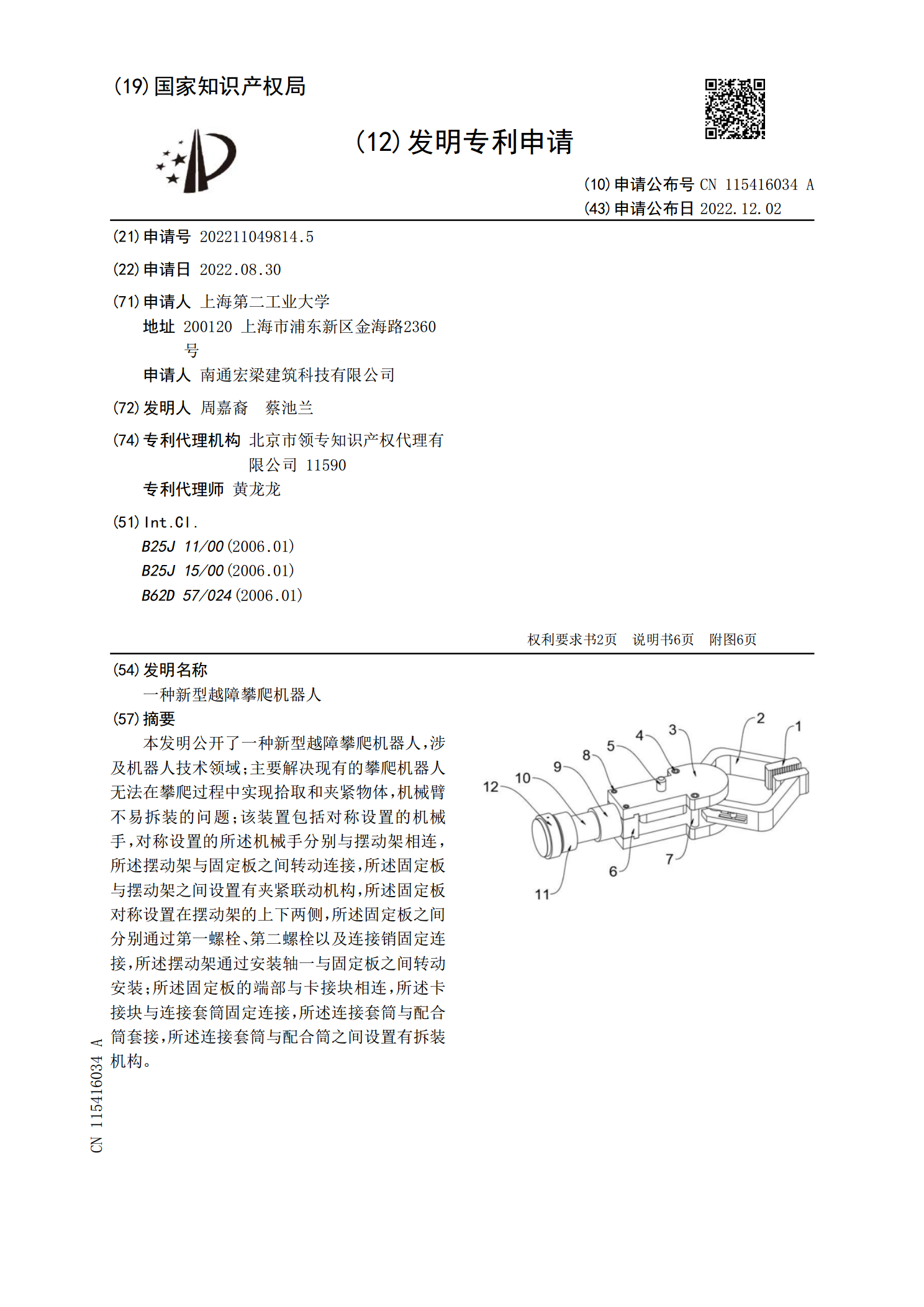
本发明公开了一种新型越障攀爬机器人,涉及机器人技术领域;主要解决现有的攀爬机器人无法在攀爬过程中实现拾取和夹紧物体,机械臂不易拆装的问题;该装置包括对称设置的机械手,对称设置的所述机械手分别与摆动架相连,所述摆动架与固定板之间转动连接,所述固定板与摆动架之间设置有夹紧联动机构,所述固定板对称设置在摆动架的上下两侧,所述固定板之间分别通过第一螺栓、第二螺栓以及连接销固定连接,所述摆动架通过安装轴一与固定板之间转动安装;所述固定板的端部与卡接块相连,所述卡接块与连接套筒固定连接,所述连接套筒与配合筒套接,所述
一种变径自适应越障攀爬机器人.pdf
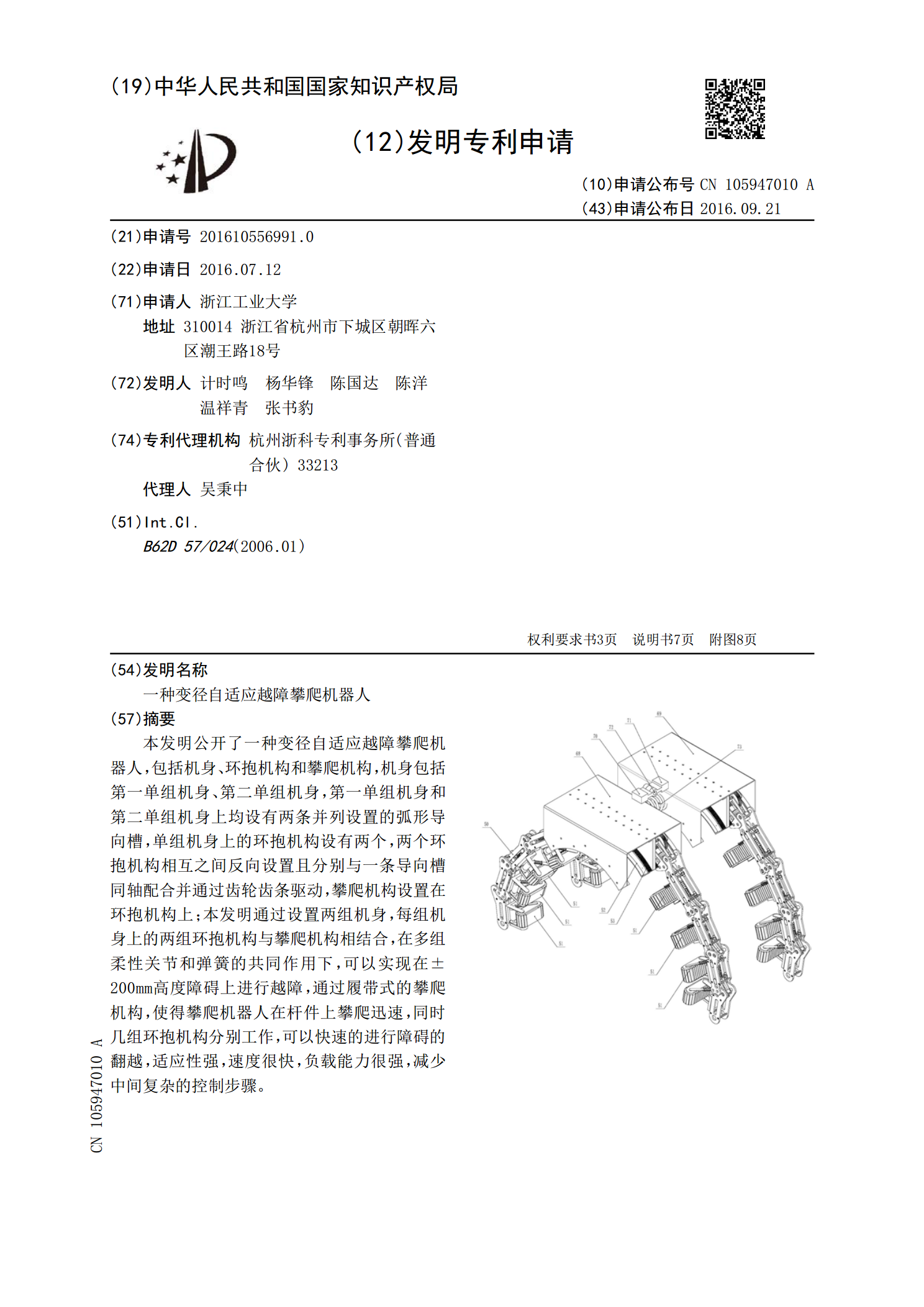
本发明公开了一种变径自适应越障攀爬机器人,包括机身、环抱机构和攀爬机构,机身包括第一单组机身、第二单组机身,第一单组机身和第二单组机身上均设有两条并列设置的弧形导向槽,单组机身上的环抱机构设有两个,两个环抱机构相互之间反向设置且分别与一条导向槽同轴配合并通过齿轮齿条驱动,攀爬机构设置在环抱机构上;本发明通过设置两组机身,每组机身上的两组环抱机构与攀爬机构相结合,在多组柔性关节和弹簧的共同作用下,可以实现在±200mm高度障碍上进行越障,通过履带式的攀爬机构,使得攀爬机器人在杆件上攀爬迅速,同时几组环抱机构
一种攀爬越障机器人的运动机构.pdf
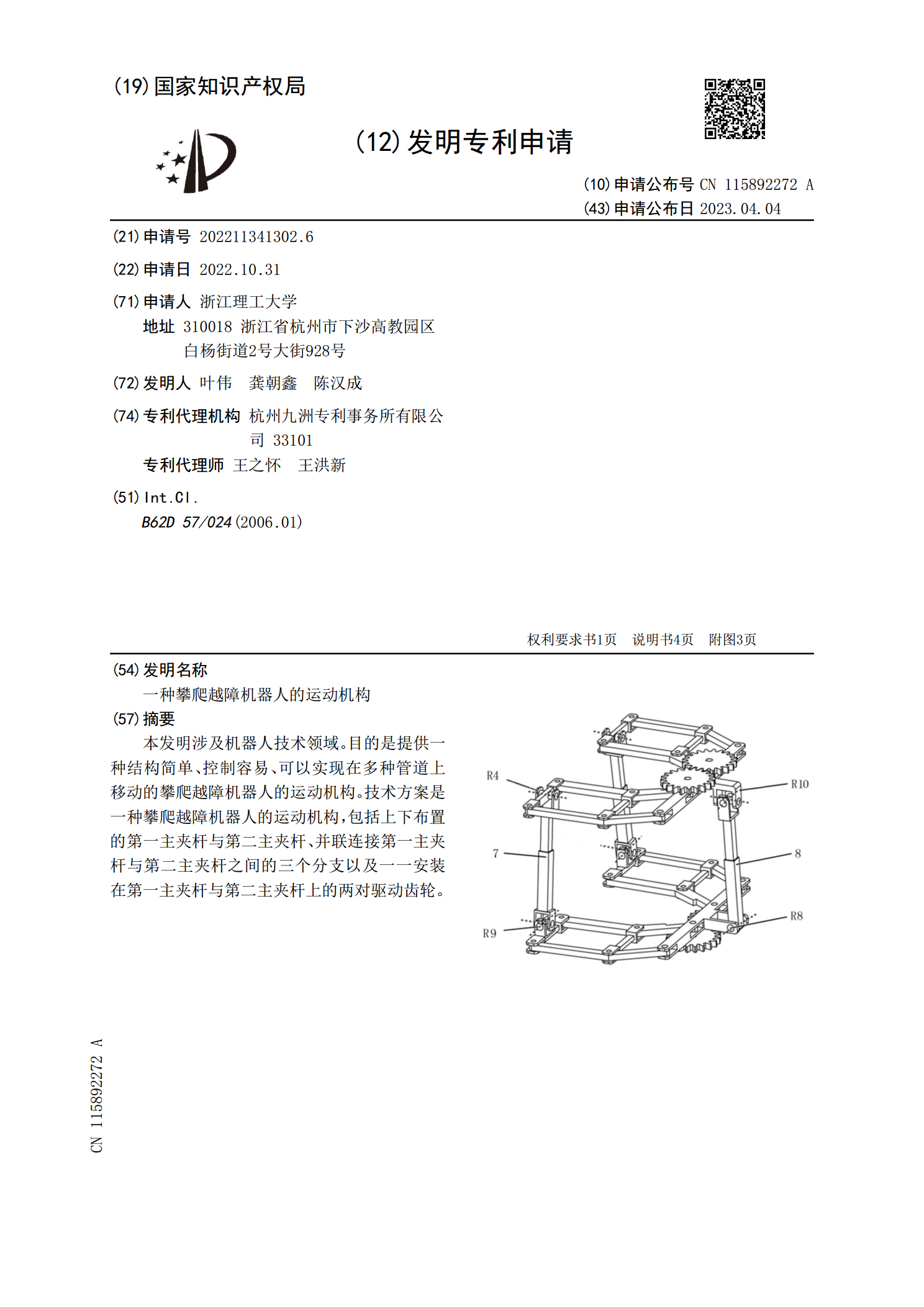
本发明涉及机器人技术领域。目的是提供一种结构简单、控制容易、可以实现在多种管道上移动的攀爬越障机器人的运动机构。技术方案是一种攀爬越障机器人的运动机构,包括上下布置的第一主夹杆与第二主夹杆、并联连接第一主夹杆与第二主夹杆之间的三个分支以及一一安装在第一主夹杆与第二主夹杆上的两对驱动齿轮。

一种磁力越障攀爬车.pdf
本发明公开了一种磁力越障攀爬车,其特征在于:包括承载单节和辅助单节,所述承载单节和辅助单节底部均设有永磁体,所述承载单节和辅助单节之间设有驱动承载轮。本发明与现有技术相比的优点是:机器替代人工,仅需机器合格证;机器可以全天候随时待命;无人身安全隐患;提高作业效率,作业人员仅需在地面远距离操控,劳动强度低;除不可抗因素,机器可以全天候作业;作业质量可控;能携带重物和大型设备;作业成本低。

一种应用于攀爬机器人的磁吸附式越障履带装置.pdf
本发明公开了一种应用于攀爬机器人的磁吸附式越障履带装置,包括履带机架、履带驱动轮总成、履带从动轮总成、驱动电机、强磁履带链条和若干强磁支座;履带驱动轮总成通过强磁履带链条与履带从动轮总成相连,驱动电机与履带驱动轮总成相连,履带驱动轮总成和履带从动轮总成分别转动安装在履带机架的两端,强磁支座安装在履带机架的底部并且通过弹簧装置与履带机架相连;强磁履带链条内设置有履带强磁块,强磁支座内设置有固定强磁块,履带强磁块与固定强磁块同侧的磁极磁性相同,强磁支座底部开设有凹槽,强磁履带链条穿过强磁支座底部的凹槽。本发明