
机载、航电专题08 机载惯导系统动态误差分析及旋转抑制.pdf

as****16


1/7
2/7

3/7

4/7

5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
机载、航电专题08 机载惯导系统动态误差分析及旋转抑制.pdf
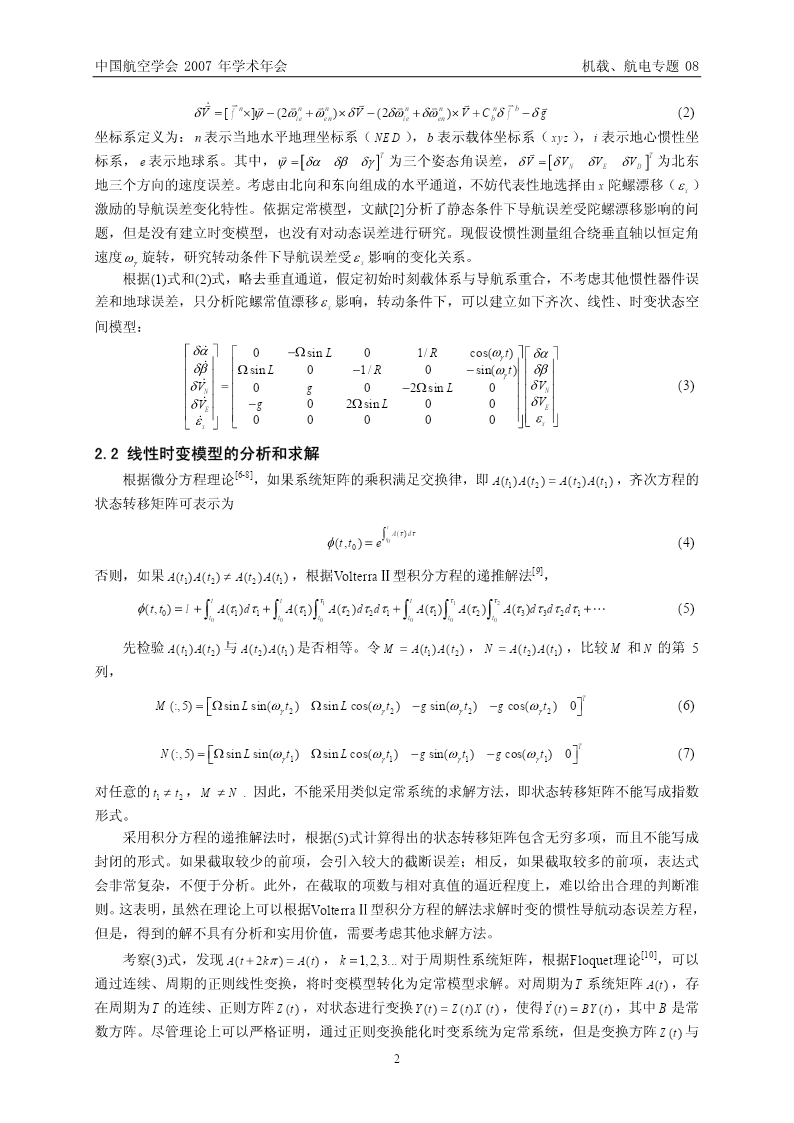
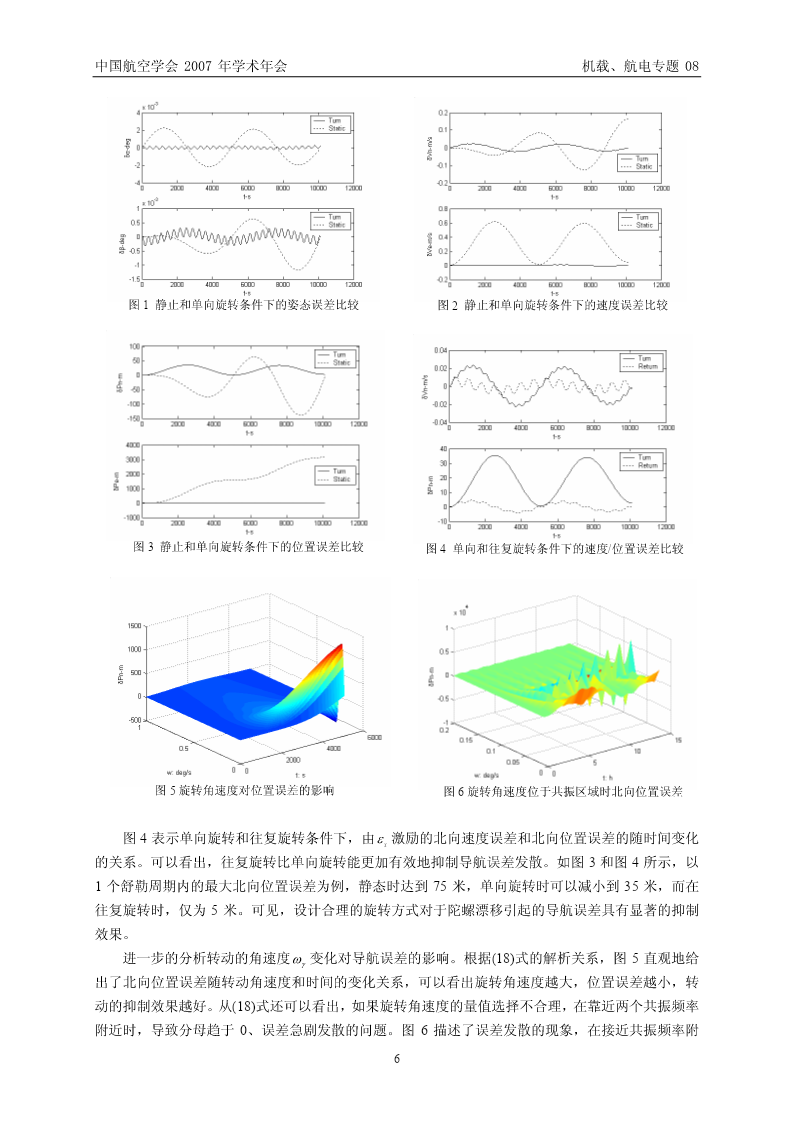
中国航空学会2007年学术年会机载、航电专题08机载惯导系统动态误差分析及旋转抑制研究练军想吴文启吴美平胡小平国防科技大学机电工程与自动化学院自动控制系313室湖南长沙410073摘要基于现有1海里/小时的标准航空惯导系统,采用误差旋转抑制技术,可以显著提高机载惯性导航系统的性能。针对配置旋转机构的惯导系统,通过建立线性时变的状态空间模型,对转动条件下的导航误差进行了分析,推导了单向旋转和往复旋转条件下,由陀螺漂移激励的导航误差的解析表达式。利用线性系统的可加性原理,对惯性导航旋转误差抑制问题进行了研究,
挠性捷联惯导系统机载安装方式误差激励研究.pdf
南京航空航天大学硕士学位论文挠性捷联惯导系统机载安装方式误差激励研究姓名:王松申请学位级别:硕士专业:精密仪器及机械指导教师:刘建业20070101南京航空航天大学硕士学位论文摘要在军、民领域中的各类飞行器上惯导系统

旋转惯导系统中的圆锥误差分析及其补偿.docx
旋转惯导系统中的圆锥误差分析及其补偿论文题目:旋转惯导系统中的圆锥误差分析及其补偿摘要:旋转惯导系统是一种用于测量和跟踪目标位置和姿态的重要导航技术。然而,由于各种误差的存在,如圆锥误差,系统的导航性能可能会受到影响。因此,本论文针对旋转惯导系统中的圆锥误差进行了详细的分析和研究,并提出了一种有效的补偿方法,以提高系统导航精度。关键词:旋转惯导系统;圆锥误差;误差分析;补偿方法第一章引言1.1研究背景和意义旋转惯导系统是一种重要的导航技术,广泛应用于航空航天、船舶和导弹等领域。它通过测量目标的旋转运动和加

机载激光雷达系统误差分析.docx
机载激光雷达系统误差分析摘要机载激光雷达系统已经被广泛地应用于遥感、制图、测量等领域。然而,由于各种因素的影响,机载激光雷达系统会出现误差,影响其测量精度。本文主要对机载激光雷达系统的误差进行分析,包括系统误差和测量误差的来源以及解决方法。通过详细的论述和分析,可以帮助读者更好地理解机载激光雷达系统的误差,以及如何减小误差并提高测量精度。关键词:机载激光雷达;误差来源;误差解决方法;测量精度一、引言机载激光雷达系统是利用激光技术进行遥感测量的一种重要手段。通过机载激光雷达系统可以获取地面的三维信息,包括地

旋转激光陀螺惯导系统误差传播特性分析.docx
旋转激光陀螺惯导系统误差传播特性分析旋转激光陀螺惯导系统误差传播特性分析摘要:旋转激光陀螺(RLG)是一种重要的惯导传感器,可在惯性系统中提供高精度的角速度信息。然而,由于各种误差源的存在,RLG系统的输出会受到误差的影响。本论文基于误差传播理论,对RLG系统的误差传播特性进行了分析。通过数学建模和模拟计算,我们研究了各种误差源对RLG系统输出误差的影响,并探讨了通过合理的误差补偿方法来减小系统误差的可能性。通过研究,我们可以更好地了解RLG系统的性能和误差来源,并为惯导系统的设计和应用提供参考。关键词: