
基于ANSYS技术的主从控制机械臂支承架模态分析及优化.pdf

qw****27

1/4
2/4
3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于ANSYS技术的主从控制机械臂支承架模态分析及优化.pdf
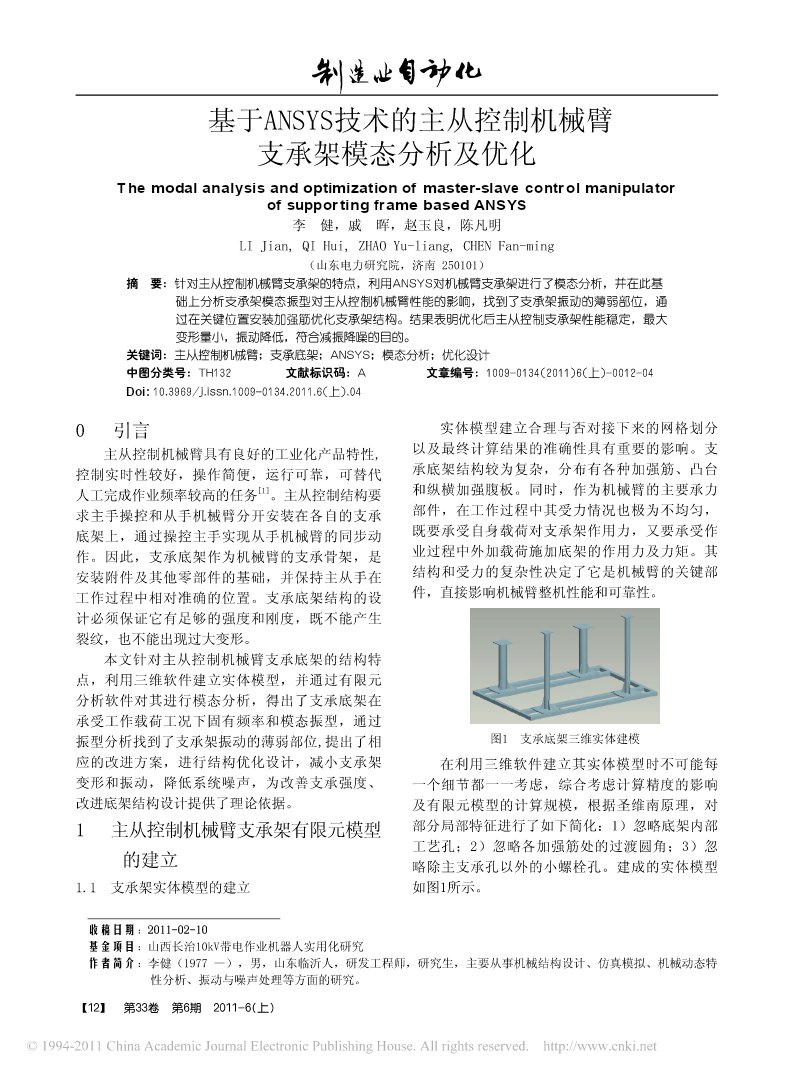
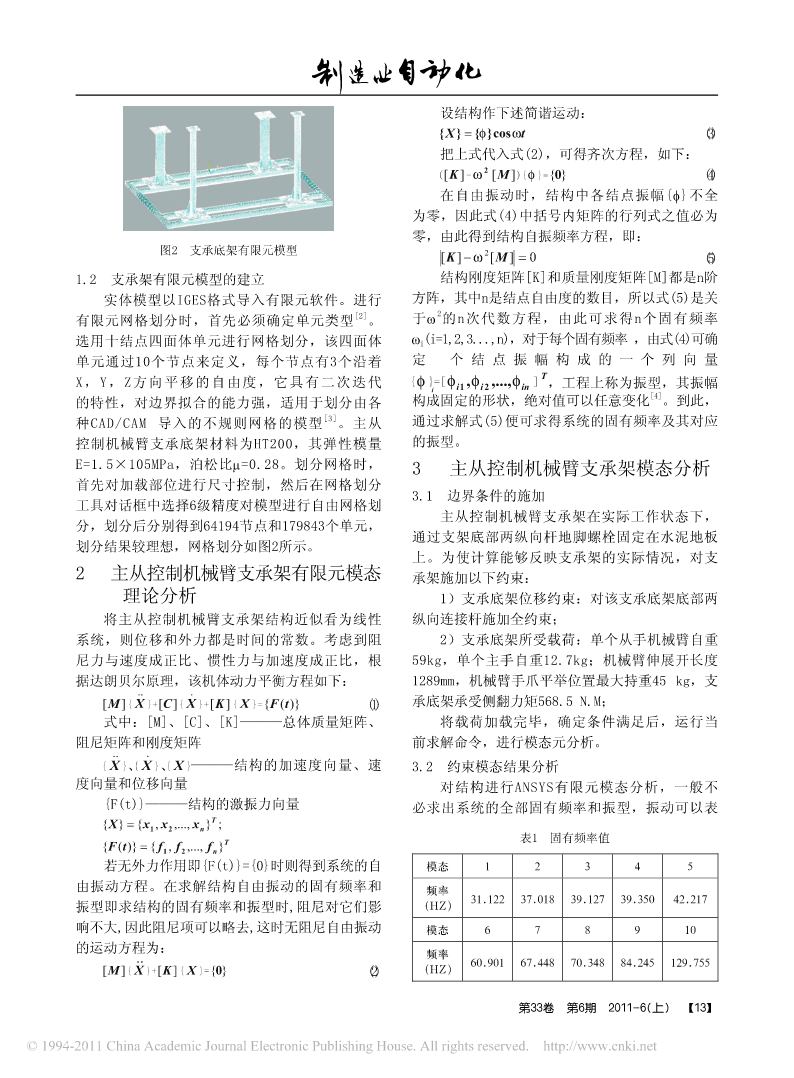
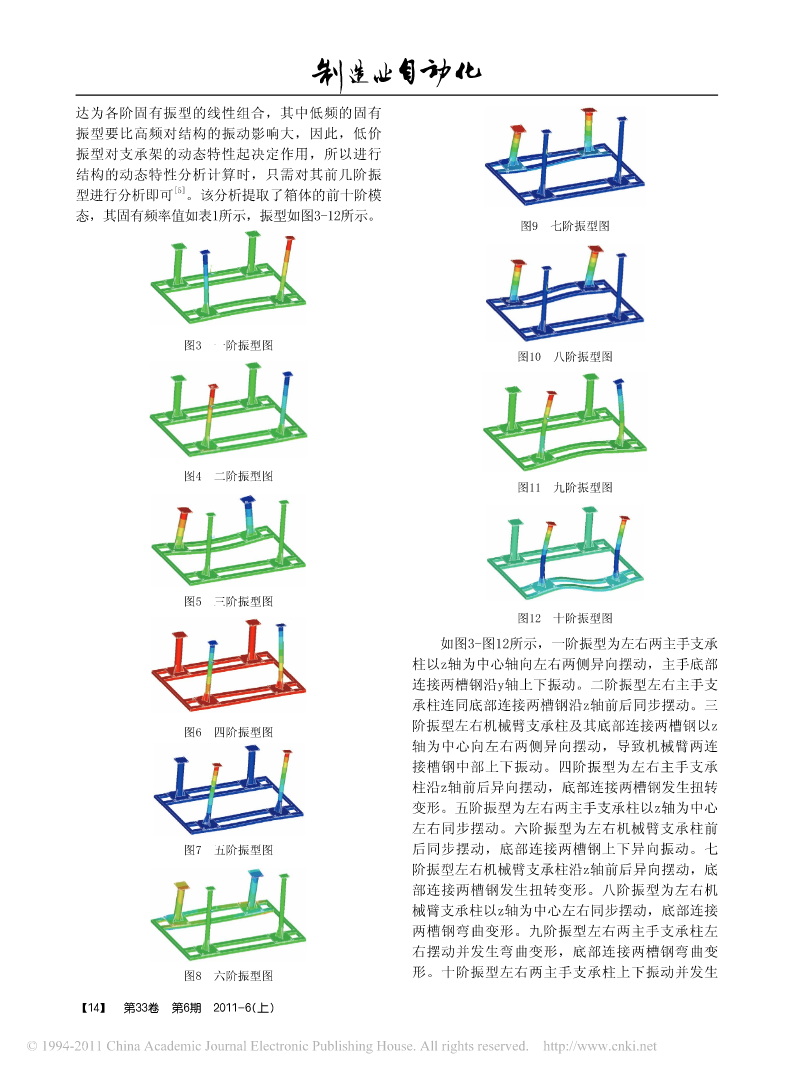
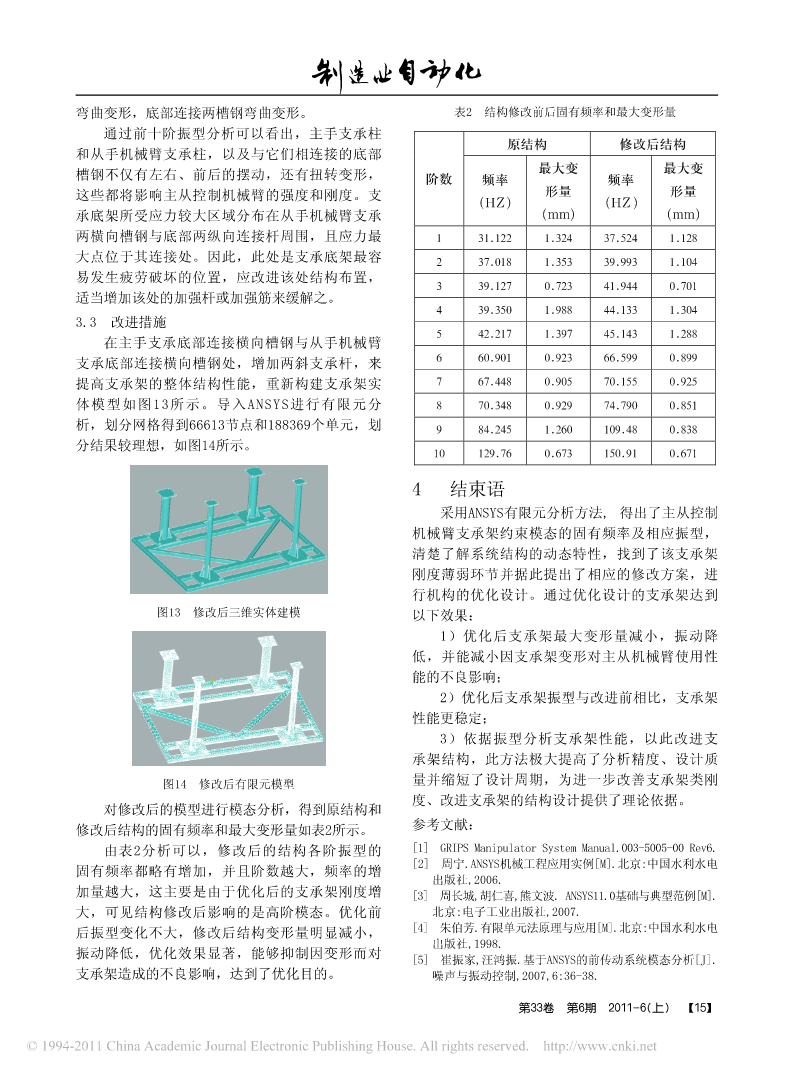
基于ANSYS技术的主从控制机械臂支承架模态分析及优化Themodalanalysisandoptimizationofmaster-slavecontrolmanipulatorofsupportingframebasedANSYS李健,戚晖,赵玉良,陈凡明LIJian,QIHui,ZHAOYu-liang,CHENFan-ming(山东电力研究院,济南250101)摘要:针对主从控制机械臂支承架的特点,利用ANSYS对机械臂支承架进行了模态分析,并在此基础上分析支承架模态振型对主从控制机械臂性能的影响

基于ANSYS技术的主从控制机械臂支承架模态分析及优化.docx
基于ANSYS技术的主从控制机械臂支承架模态分析及优化摘要本文针对一种主从控制机械臂支承架进行了模态分析和优化设计。首先,基于ANSYS软件建立了支承架的有限元模型,并进行了模态分析。通过对不同频率下的支承架模态图和振型分析,确定了支承架结构中存在的主要模态形式和频率,对支承架的动态响应和结构稳定性进行了评估。然后,将支承架进行了优化设计,采用了薄板加筋、加厚关键零件和优化材料选择等方式来改善其结构的动态响应和稳定性。最后,对优化后的支承架进行了模态分析和振动响应计算,并与原始设计进行了对比分析。结果表明

臂架静态模态分析及优化设计.docx
臂架静态模态分析及优化设计标题:臂架静态模态分析及优化设计摘要:臂架是一种常用的结构,在建筑、航空航天、机械等领域得到广泛应用。本文以臂架的静态模态分析及优化设计为研究课题,通过对臂架结构进行模态分析,分析其固有频率和模态形态,进而进行优化设计,提高结构的性能。通过本文的研究,可以为臂架的设计和优化提供理论依据和参考。1.引言臂架是一种重要的结构形式,具有高承载能力和稳定性,广泛应用于工程领域。臂架的静态模态分析及优化设计是提高其结构性能的重要手段。2.静态模态分析静态模态分析是指在结构受到外力作用下,结

基于ANSYS Workbench的塔机臂架结构优化分析.docx
基于ANSYSWorkbench的塔机臂架结构优化分析摘要:本文基于ANSYSWorkbench平台,对塔式起重机中的臂架结构进行优化分析。首先建立了3D模型,然后对模型进行了静态结构分析和优化设计,得出了最优结构。通过优化,减轻了结构重量,提高了结构强度,同时降低了材料成本,为塔式起重机的设计和生产提供了参考和思路。关键词:塔式起重机;臂架;静态结构分析;优化设计;ANSYSWorkbench1.引言塔式起重机是现代工业和建筑必不可少的一种高大威猛的机械装备,它由超大的塔体、固定臂架和移动臂架组成。臂架

基于ANSYS的导管架平台模态分析.pdf
第8卷第2期南通航运职业技术学院学报Vol.8No.22009年6月JOURNALOFNANTONGVOCATIONAL&TECHNICALSHIPPINGCOLLEGEJun.2009基于ANSYS的导管架平台模态分析蔡厚平,谢云飞(南通航运职业技术学院船舶工程系,江苏南通226010)摘要:作为海洋油气开发的基础设施,海洋平台的安全性越来越受到人们重视。文章以某导管架平台为例,采用ANSYS模态分析,获得平台的模态振动规律,最终得出平台各方向的模态规律及薄弱部位。关键词:导管架平台;ANSYS;模态分