
小波分析在GPS动态监测数据消噪中的应用caj.pdf

qw****27

1/4
2/4
3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

小波分析在GPS动态监测数据消噪中的应用caj.pdf
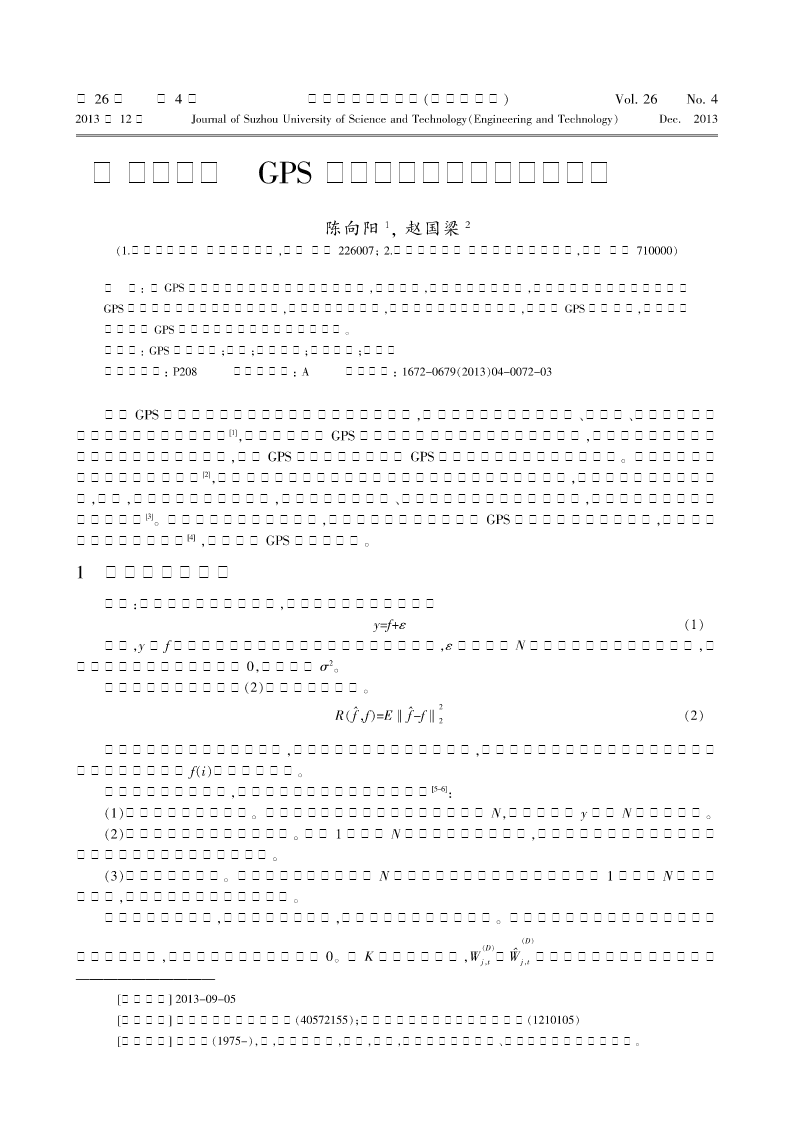
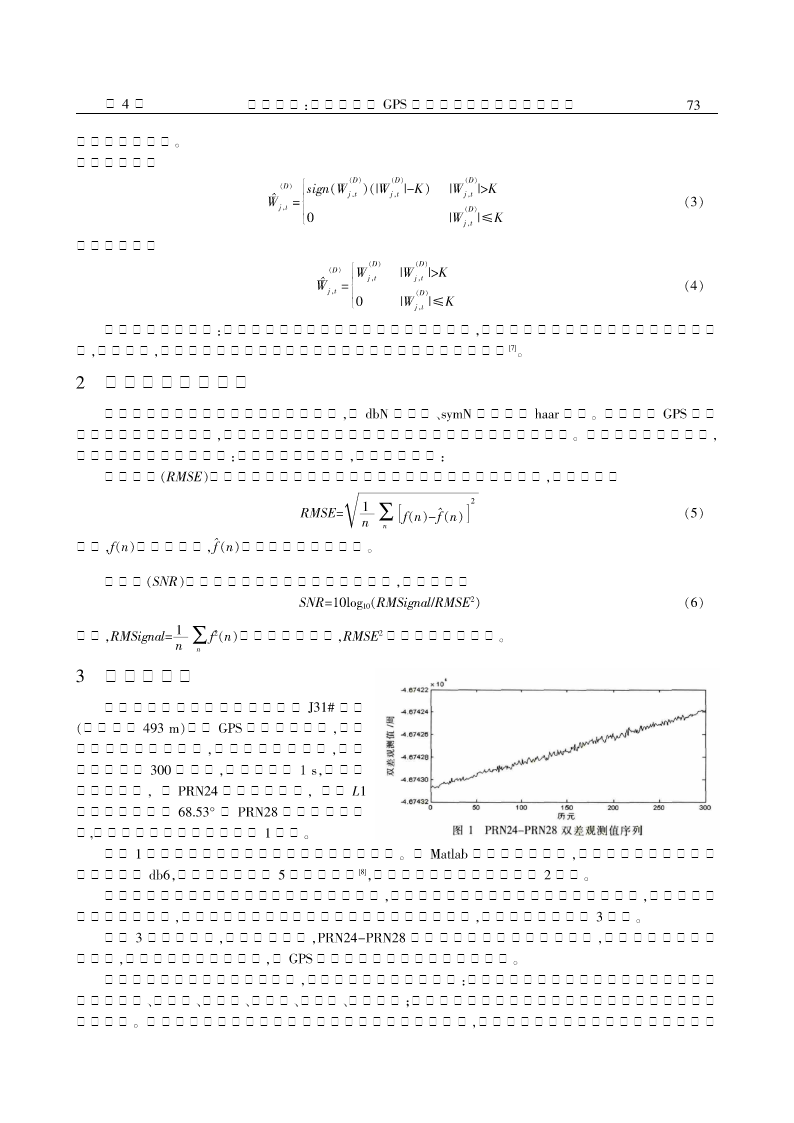
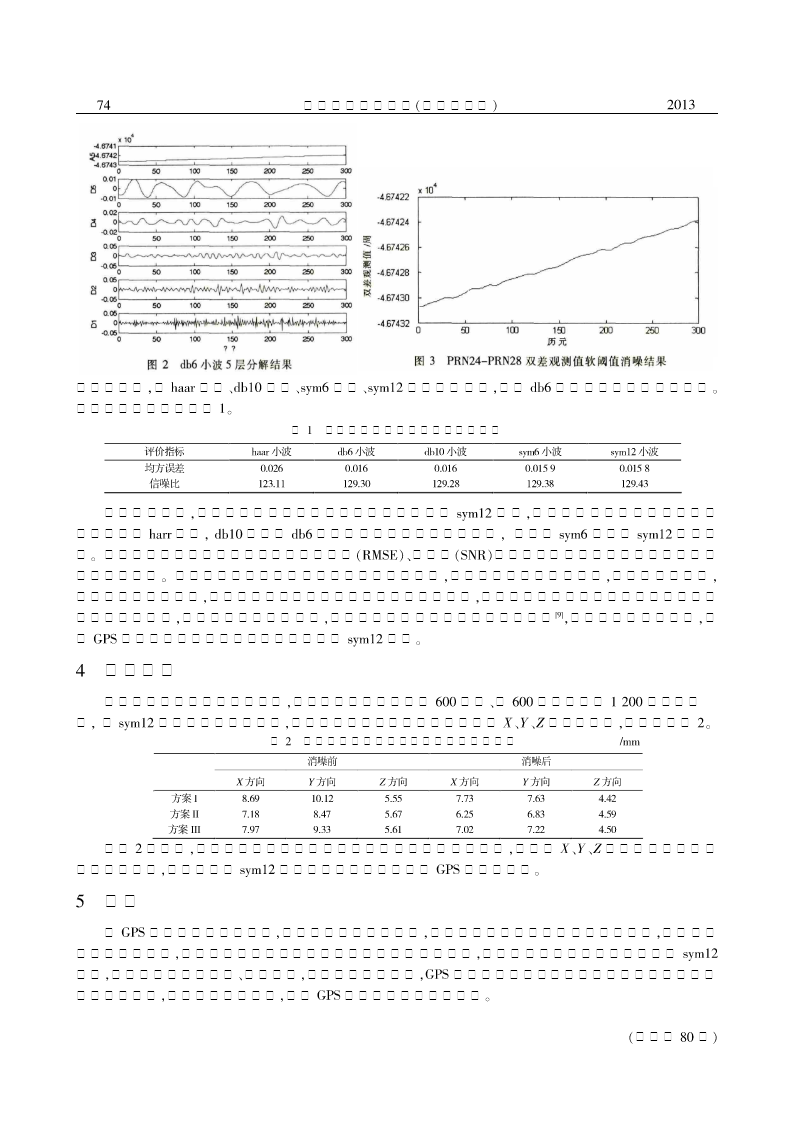
第26卷第4期苏州科技学院学报(工程技术版)Vol.26No.42013年12月JournalofSuzhouUniversityofScienceandTechnology(EngineeringandTechnology)Dec.2013小波分析在GPS动态监测数据消噪中的应用陈向阳1,赵国梁2(1.南通职业大学建筑工程学院,江苏南通226007;2.西安科技大学测绘科学与技术学院,陕西西安710000)摘要:对GPS双差观测数据的消噪问题进行分析,结果表明,利用小波去噪原理,可有效地从受到强噪声干扰

小波去噪在GPS动态监测数据处理中的应用研究.docx
小波去噪在GPS动态监测数据处理中的应用研究随着现代全球导航卫星系统的不断发展,全球定位系统(GPS)已成为现代导航领域的重要工具。在GPS动态监测数据处理中,由于受噪声、干扰等因素的影响,处理数据的精度和可靠性存在一定的问题。因此,小波去噪技术在GPS动态监测数据处理中的应用得到了广泛的关注和研究。一、小波变换概述小波变换是一种基于时间-频率分析的信号分析方法,在时频领域上具有独特的优势。通过小波变换,可以将信号分解成不同尺度和频率的小波系数,以更好地进行信号表示和分析。小波变换对于多尺度分析和局部分析

苏通大桥GPS监测数据的小波滤噪分析.docx
苏通大桥GPS监测数据的小波滤噪分析摘要:苏通大桥是连接江苏省南通市和上海市的一座大型跨海桥梁,GPS监测数据对于该桥结构的安全监测非常重要。本文使用小波滤噪来对苏通大桥GPS监测数据进行分析,通过多种小波滤波方法处理数据得到了较好的结果,为该桥结构安全监测提供了有力的支持。一、引言苏通大桥是世界上最长的跨行淡水江轨道和公路双层铁路桥和公路桥。苏通大桥自2008年通车以来一直在提供安全可靠的服务,同时桥梁的运作也应该受到定期监测来保证桥梁的安全性。GPS监测是目前常用的桥梁结构监测方法之一,通过GPS监测

第二代小波在GPS双差观测值消噪中的应用.docx
第二代小波在GPS双差观测值消噪中的应用第二代小波在GPS双差观测值消噪中的应用摘要:随着全球定位系统(GPS)技术在导航、测绘、农业等领域的广泛应用,对于GPS信号的精准测量、定位、导航等问题的研究也变得日益重要。然而,由于GPS信号受到多种干扰因素的影响,导致接收机接收到的GPS观测值带有噪声。本文针对GPS双差观测值的消噪问题,提出了第二代小波方法,并对其在GPS双差观测值消噪中的应用进行了研究。实验结果表明,第二代小波方法能够有效地消除GPS观测值中的噪声,提高了GPS定位精度和稳定性。关键词:全

公路边坡变形监测数据的小波阈值消噪方法.docx
公路边坡变形监测数据的小波阈值消噪方法Title:WaveletThresholdDenoisingMethodforMonitoringDataofHighwaySlopeDeformationAbstract:Highwayslopedeformationsposeasignificantchallengetoensuringroadsafetyandstability.Reliablemonitoringdataisessentialforearlydetectionandpreventivemea