
一种煤矿巷道变形监测装置及其使用方法.pdf

白凡****12


1/9

2/9

3/9
4/9
5/9
6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种煤矿巷道变形监测装置及其使用方法.pdf
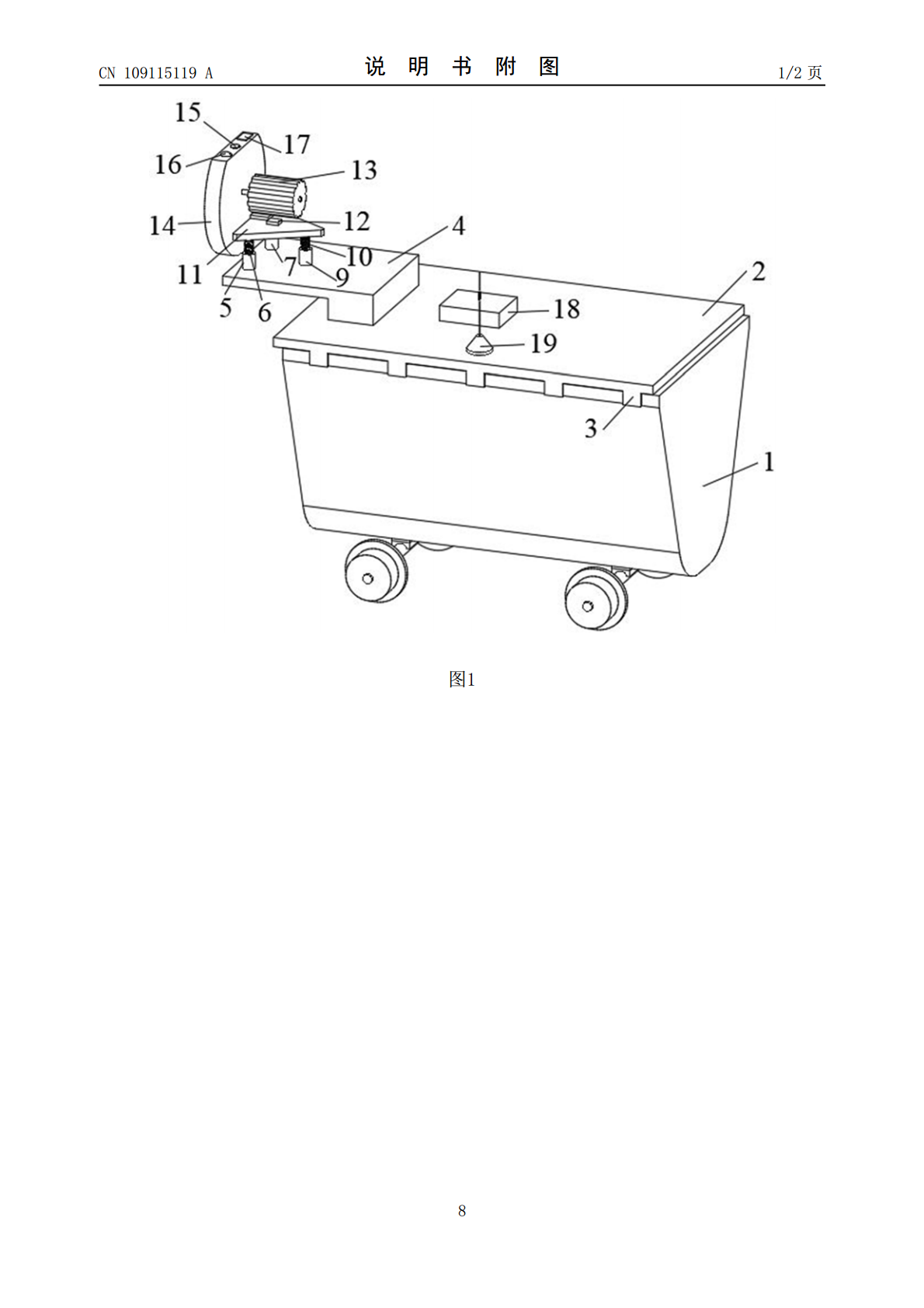
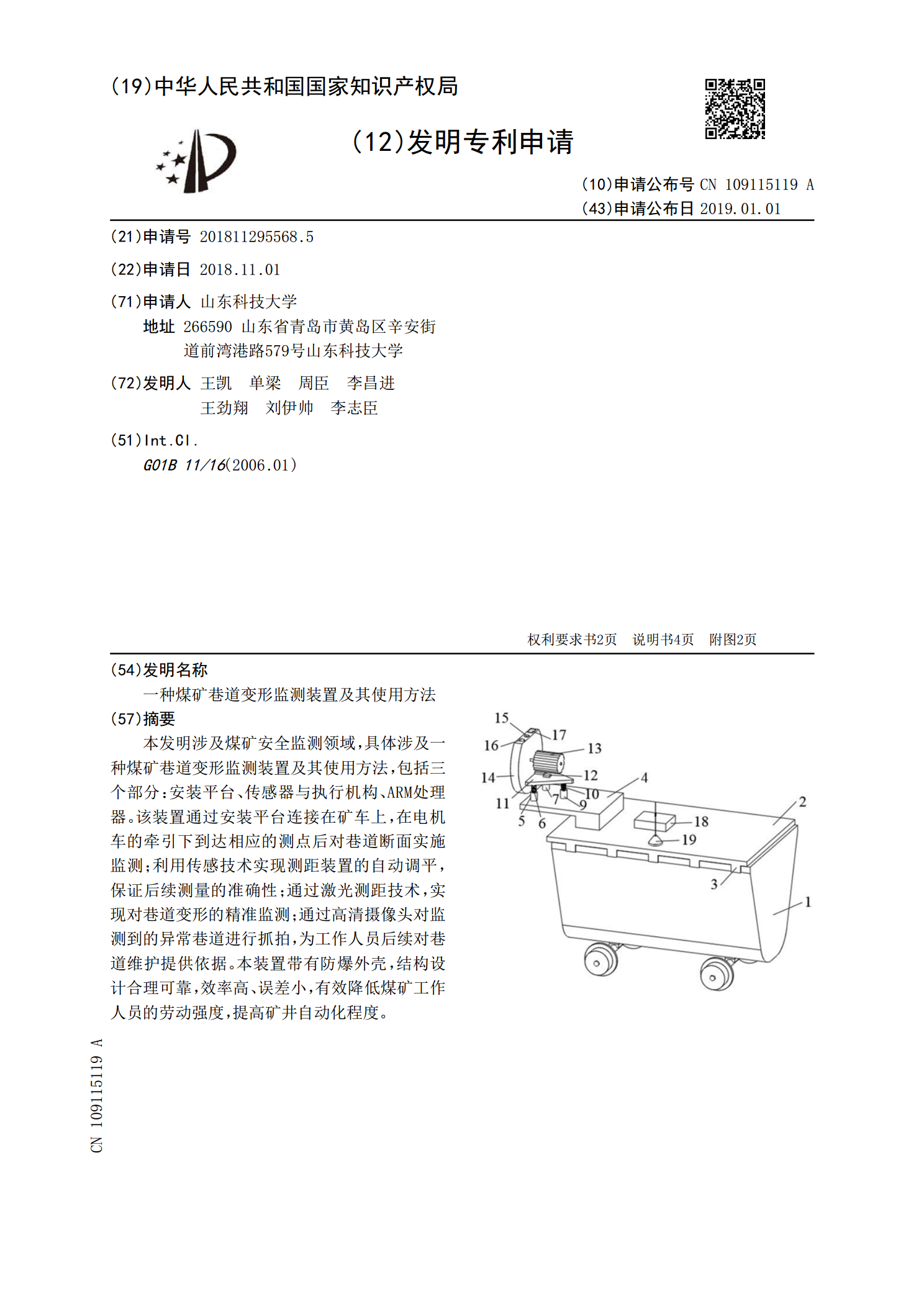
本发明涉及煤矿安全监测领域,具体涉及一种煤矿巷道变形监测装置及其使用方法,包括三个部分:安装平台、传感器与执行机构、ARM处理器。该装置通过安装平台连接在矿车上,在电机车的牵引下到达相应的测点后对巷道断面实施监测;利用传感技术实现测距装置的自动调平,保证后续测量的准确性;通过激光测距技术,实现对巷道变形的精准监测;通过高清摄像头对监测到的异常巷道进行抓拍,为工作人员后续对巷道维护提供依据。本装置带有防爆外壳,结构设计合理可靠,效率高、误差小,有效降低煤矿工作人员的劳动强度,提高矿井自动化程度。
一种煤矿巷道岩壁变形监测装置.pdf
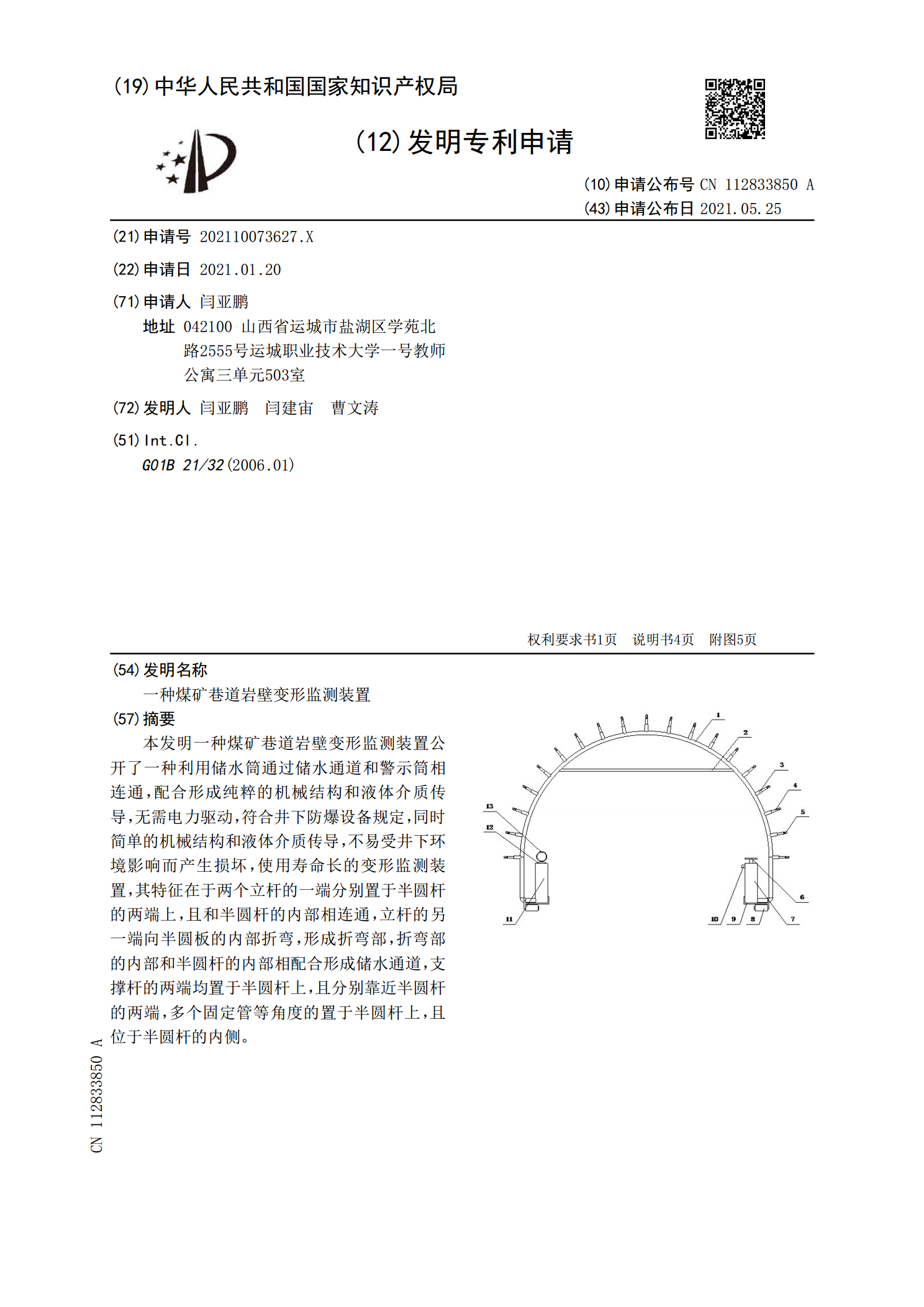
本发明一种煤矿巷道岩壁变形监测装置公开了一种利用储水筒通过储水通道和警示筒相连通,配合形成纯粹的机械结构和液体介质传导,无需电力驱动,符合井下防爆设备规定,同时简单的机械结构和液体介质传导,不易受井下环境影响而产生损坏,使用寿命长的变形监测装置,其特征在于两个立杆的一端分别置于半圆杆的两端上,且和半圆杆的内部相连通,立杆的另一端向半圆板的内部折弯,形成折弯部,折弯部的内部和半圆杆的内部相配合形成储水通道,支撑杆的两端均置于半圆杆上,且分别靠近半圆杆的两端,多个固定管等角度的置于半圆杆上,且位于半圆杆的内侧
一种巷道变形监测装置.pdf
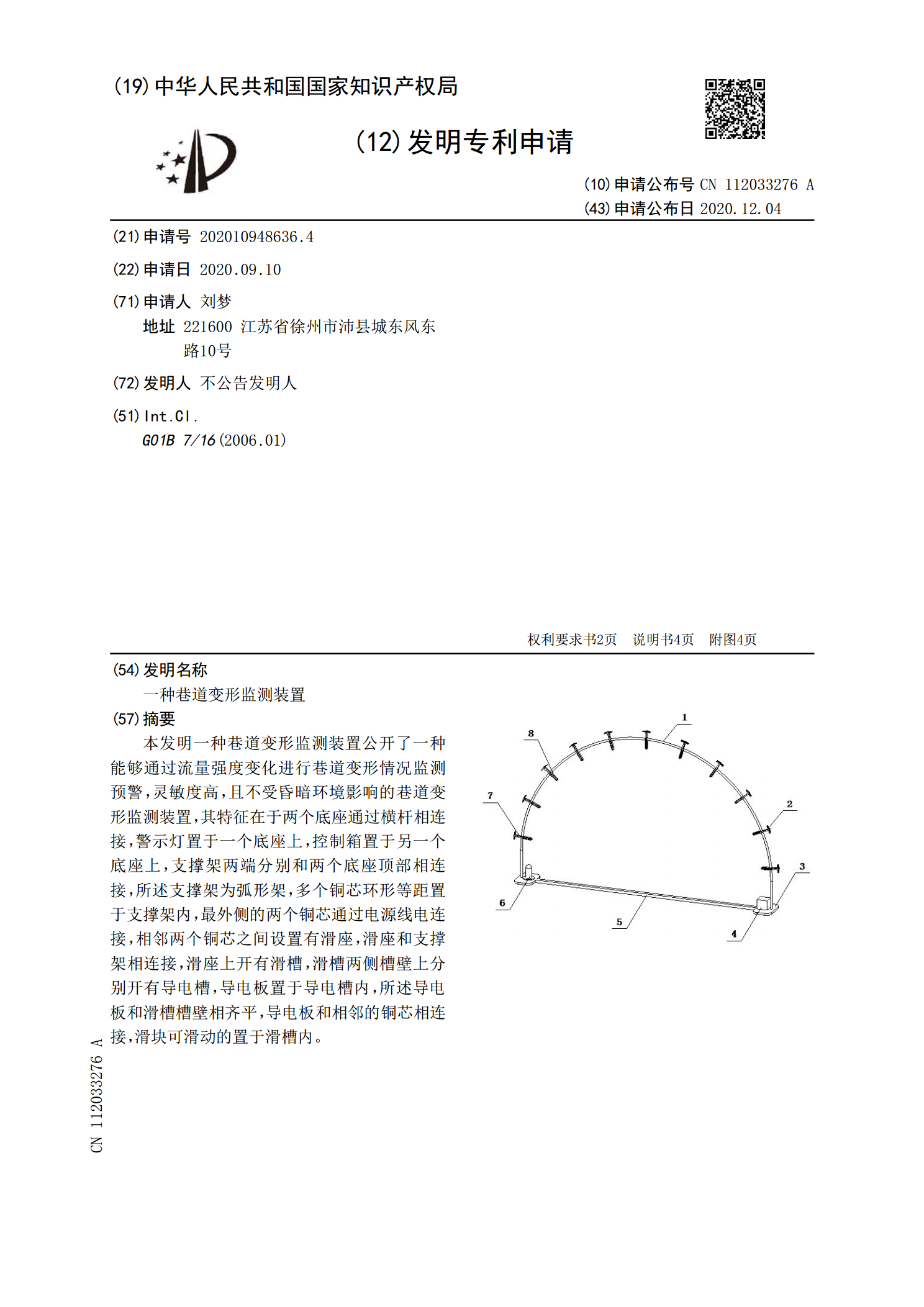
本发明一种巷道变形监测装置公开了一种能够通过流量强度变化进行巷道变形情况监测预警,灵敏度高,且不受昏暗环境影响的巷道变形监测装置,其特征在于两个底座通过横杆相连接,警示灯置于一个底座上,控制箱置于另一个底座上,支撑架两端分别和两个底座顶部相连接,所述支撑架为弧形架,多个铜芯环形等距置于支撑架内,最外侧的两个铜芯通过电源线电连接,相邻两个铜芯之间设置有滑座,滑座和支撑架相连接,滑座上开有滑槽,滑槽两侧槽壁上分别开有导电槽,导电板置于导电槽内,所述导电板和滑槽槽壁相齐平,导电板和相邻的铜芯相连接,滑块可滑动的
一种井下巷道变形监测装置及方法.pdf
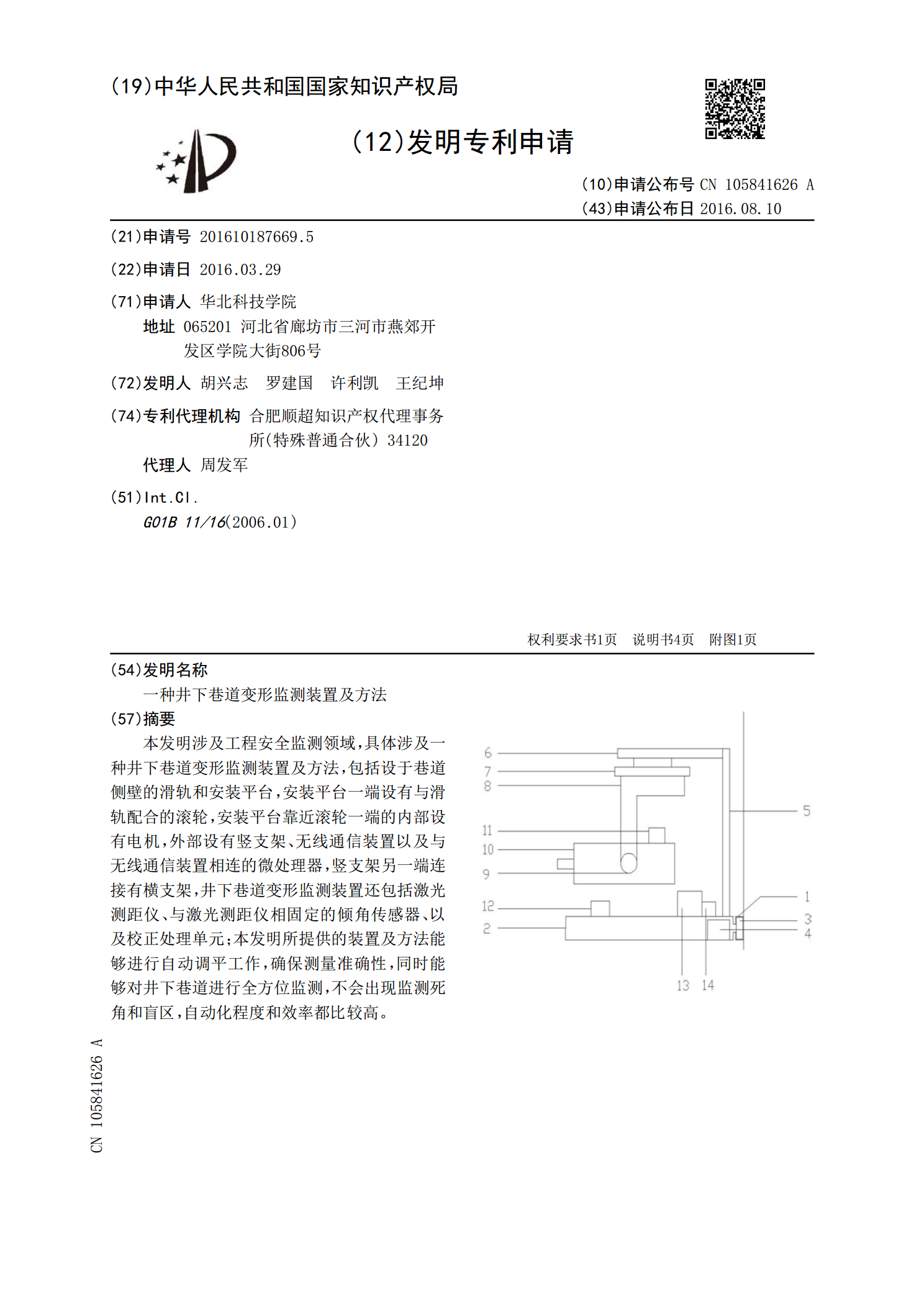
本发明涉及工程安全监测领域,具体涉及一种井下巷道变形监测装置及方法,包括设于巷道侧壁的滑轨和安装平台,安装平台一端设有与滑轨配合的滚轮,安装平台靠近滚轮一端的内部设有电机,外部设有竖支架、无线通信装置以及与无线通信装置相连的微处理器,竖支架另一端连接有横支架,井下巷道变形监测装置还包括激光测距仪、与激光测距仪相固定的倾角传感器、以及校正处理单元;本发明所提供的装置及方法能够进行自动调平工作,确保测量准确性,同时能够对井下巷道进行全方位监测,不会出现监测死角和盲区,自动化程度和效率都比较高。
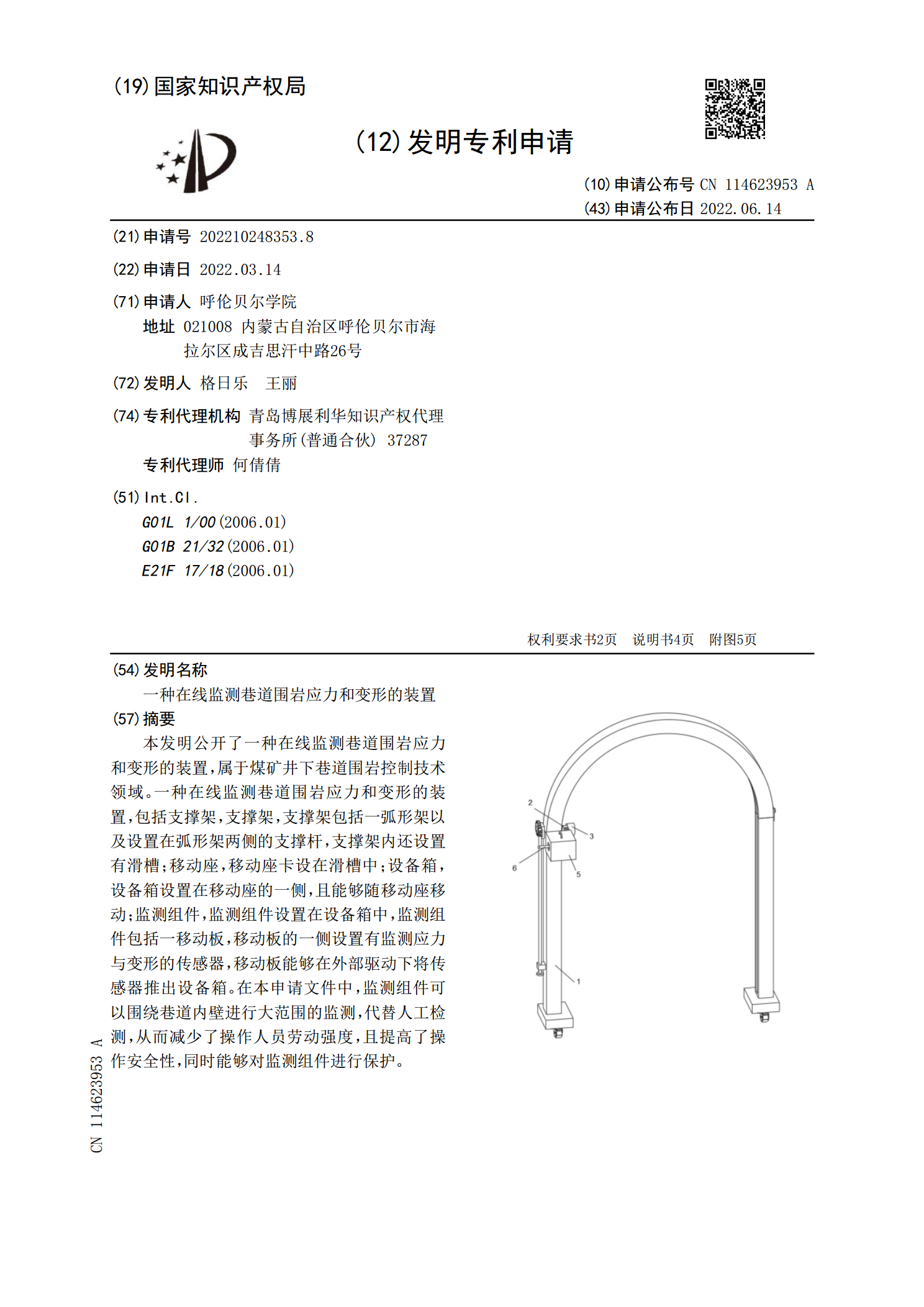
一种在线监测巷道围岩应力和变形的装置.pdf
本发明公开了一种在线监测巷道围岩应力和变形的装置,属于煤矿井下巷道围岩控制技术领域。一种在线监测巷道围岩应力和变形的装置,包括支撑架,支撑架,支撑架包括一弧形架以及设置在弧形架两侧的支撑杆,支撑架内还设置有滑槽;移动座,移动座卡设在滑槽中;设备箱,设备箱设置在移动座的一侧,且能够随移动座移动;监测组件,监测组件设置在设备箱中,监测组件包括一移动板,移动板的一侧设置有监测应力与变形的传感器,移动板能够在外部驱动下将传感器推出设备箱。在本申请文件中,监测组件可以围绕巷道内壁进行大范围的监测,代替人工检测,从而