
电子罗盘的方位测量误差及其补偿校正.pdf

qw****27


1/4

2/4

3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
电子罗盘的方位测量误差及其补偿校正.pdf
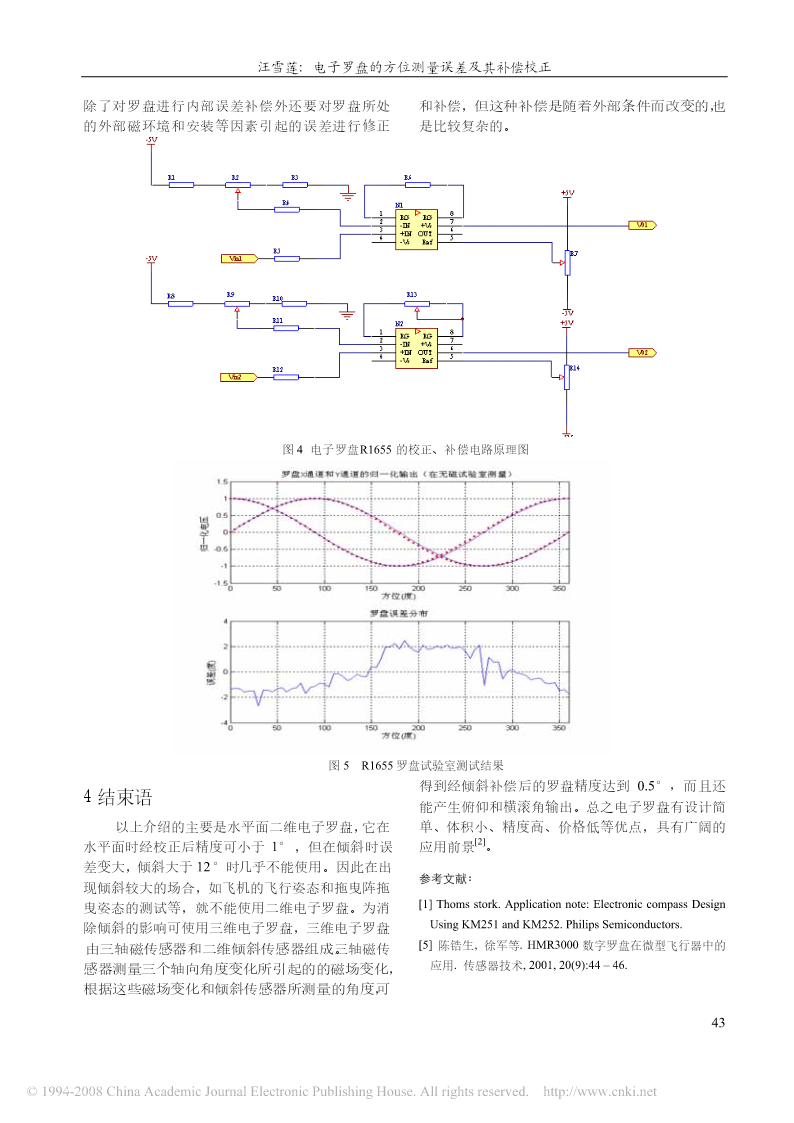
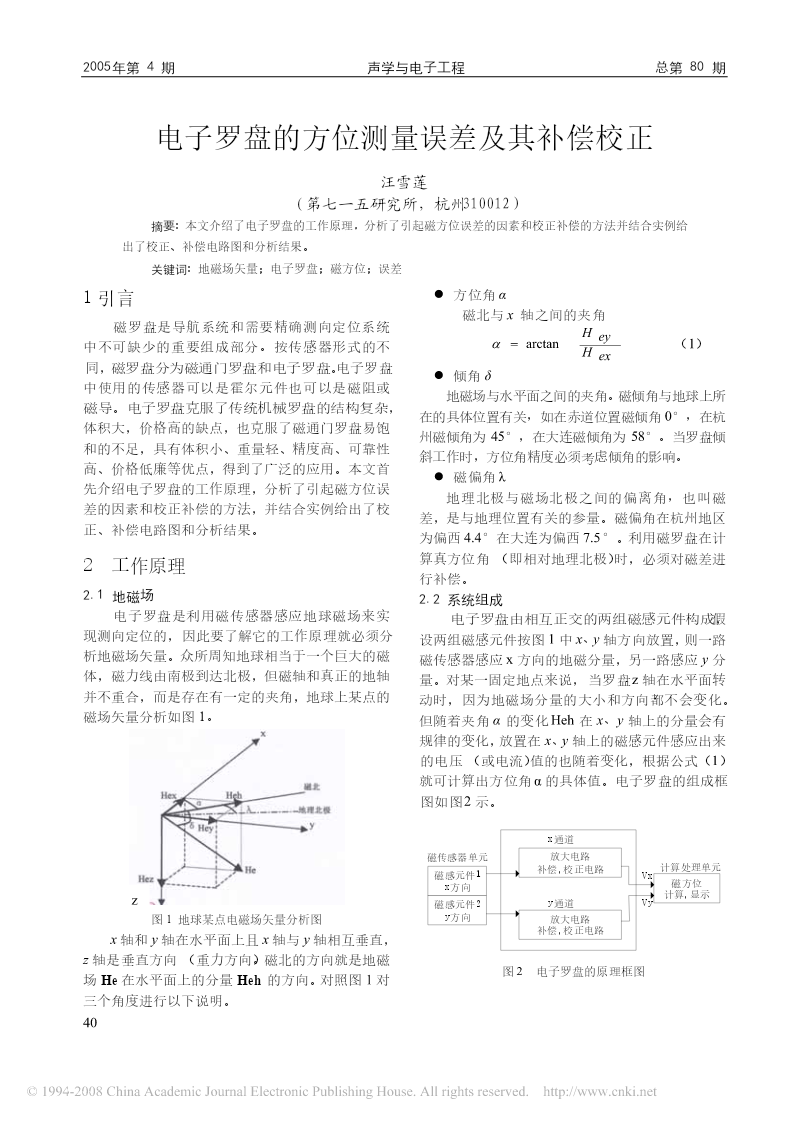
2005年第4期声学与电子工程总第80期电子罗盘的方位测量误差及其补偿校正汪雪莲(第七一五研究所,杭州310012)摘要:本文介绍了电子罗盘的工作原理,分析了引起磁方位误差的因素和校正补偿的方法并结合实例给出了校正、补偿电路图和分析结果。关键词:地磁场矢量;电子罗盘;磁方位;误差1引言�方位角α磁北与x轴之间的夹角磁罗盘是导航系统和需要精确测向定位系统Hey中不可缺少的重要组成部分。按传感器形式的不α=arctan(1)Hex同,磁罗盘分为磁通门罗盘和电子罗盘。电子罗盘�倾角δ中使用的传感器可以是霍尔元件

电子磁罗盘测量误差校正方法研究.pdf
第28卷第10期仪器仪表学报Vo1.28No.102007年10月ChineseJournalofScientificInstrumentOct.2007电子磁罗盘测量误差校正方法研究沈鹏,徐景硕,高扬(海军航空工程学院青岛分院青岛266041)摘要:针对磁航向测量中存在的各种误差,分析了电子磁罗盘(EMC)系统误差的形成原因与机理,在此基础上系统地研究了在任意姿态下电子磁罗盘磁航向误差校正问题,并且具体给出了2种误差系数的求解方法以及相应的误差补偿方法。实验结果表明,在椭圆假设法中除去该方法不能补偿的安
带倾斜修正的电子磁罗盘倾角测量误差补偿算法.pdf
第21卷第6期中国惯性技术学报Vol.21No.62013年12月JournalofChineseInertialTechnologyDec.2013文章编号:1005-6734(2013)06-0721-05带倾斜修正的电子磁罗盘倾角测量误差补偿算法于靖,卜雄洙,叶健(南京理工大学机械工程学院南京210094)摘要:针对目前带倾斜修正的电子磁罗盘由于倾角测量误差大,导致航向角测量精度低的问题,提出了一种基于三轴加速度传感器倾角测量模型进行误差补偿的方法。首先,研究了磁罗盘的倾角测量误差对航向角测量精度的
倾斜补偿电子罗盘设计.pdf
西北工业大学硕士学位论文倾斜补偿电子罗盘设计姓名:邵婷婷申请学位级别:硕士专业:电工理论与新技术指导教师:马建仓20070301摘要在微控制器广泛应用的今天,利用磁阻器件和单片机实现集成化和智能化成为改本文在概述磁罗盘的发展方向及掌握磁阻传感器功能特点的基础上,介绍了采用HoneyweU公司的磁阻传感器HMCl052/1051Z、MEMSIC公司的两轴加速度传感器MⅪ)2020ML、以单片机ADuC842为核心设计的磁阻电子罗盘硬件电路;根据传感器输出信号特点,利用单片机ADuC842的测量处理信息功能编

电子罗盘测姿及误差校正算法研究.docx
电子罗盘测姿及误差校正算法研究电子罗盘是一种用来测量方向和姿态的重要工具,在航海、航空、导航等领域有着广泛的应用。然而,电子罗盘的测量结果常常受到多种误差的影响,如软磁干扰、硬铁磁性物质的存在、姿态角度的变化等,这些误差会导致罗盘测量结果的不准确性。因此,研究如何校正电子罗盘的误差,提高其测量精度,对于电子罗盘的应用具有重要意义。电子罗盘的测量原理是基于地磁感应原理。当电子罗盘受到地磁场的作用时,其中的磁传感器会受到磁感应线的作用,测量出磁场的强度和方向,从而确定罗盘的方向。然而,现实环境中存在着各种干扰