
定时器中断实验.ppt

kp****93

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

定时器中断实验.ppt
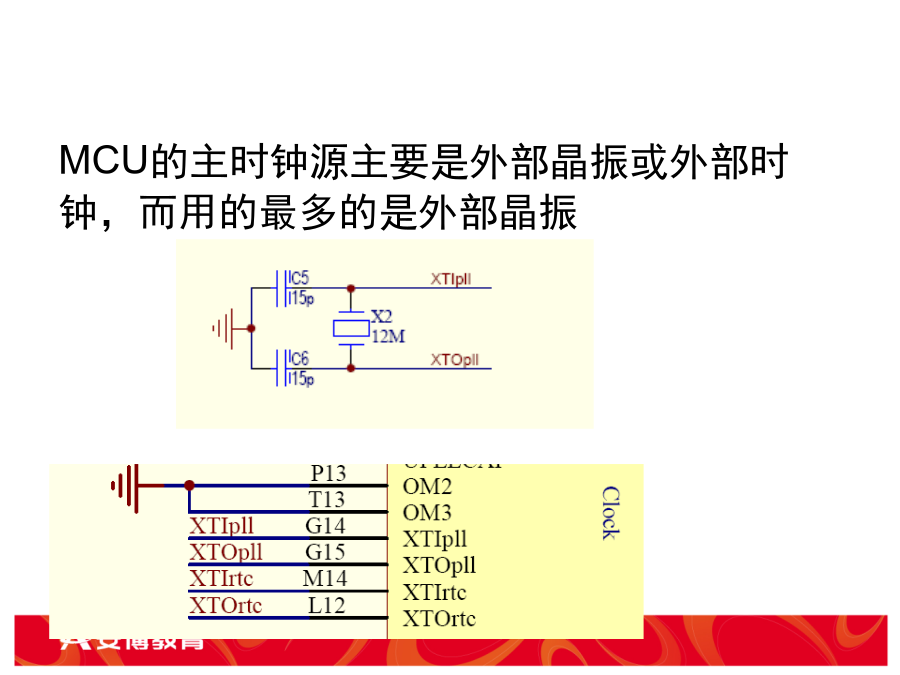
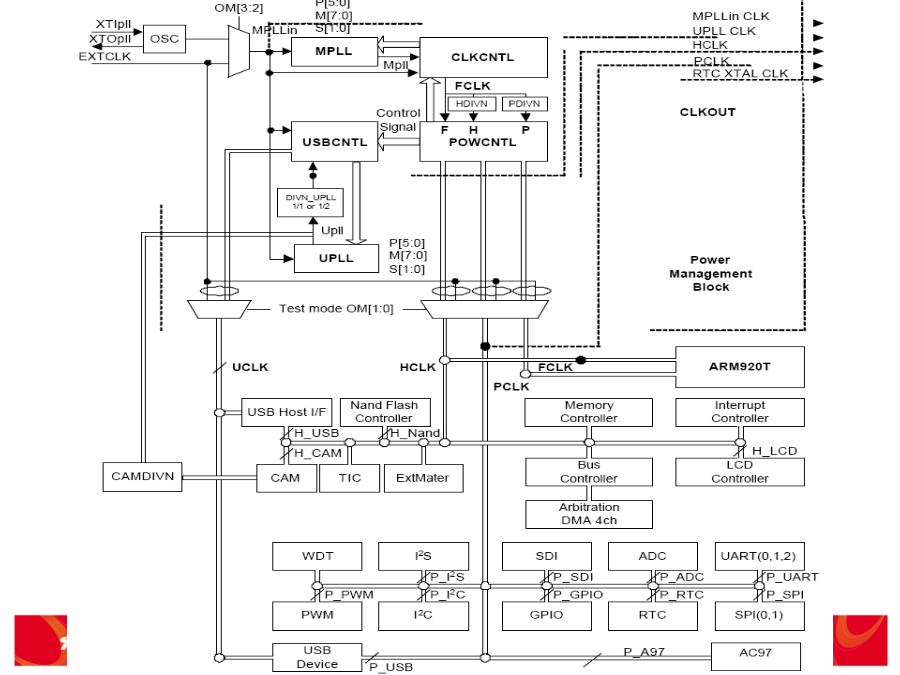
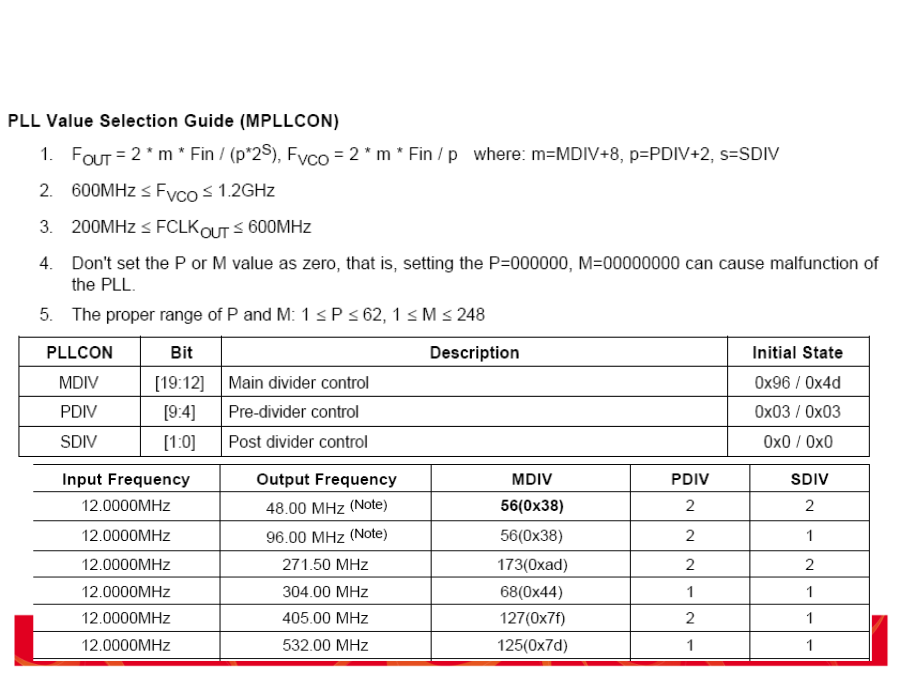
定时器中断实验目的:了解时钟系统熟悉ARM定时器中断会使用定时器中断产生PWM波形每当程序需要延时时,我们是利用循环语句来实现。这种方法的延时简单,但不是很精确,就是说不能得到确切的一段时间的延时。因此当需要精确延时时,就不能采用这种方法了。一般是利用定时器来实现。MCU的主时钟源主要是外部晶振或外部时钟,而用的最多的是外部晶振系统内所使用的时钟都是外部时钟源经过一定的处理得到的。由于外部时钟源的频率一般不能满足系统所需要的高频条件,所以往往需要PLL(锁相环)进行倍频处理。在s3c2440中,有2个不同
实验十二 定时器及中断.pdf
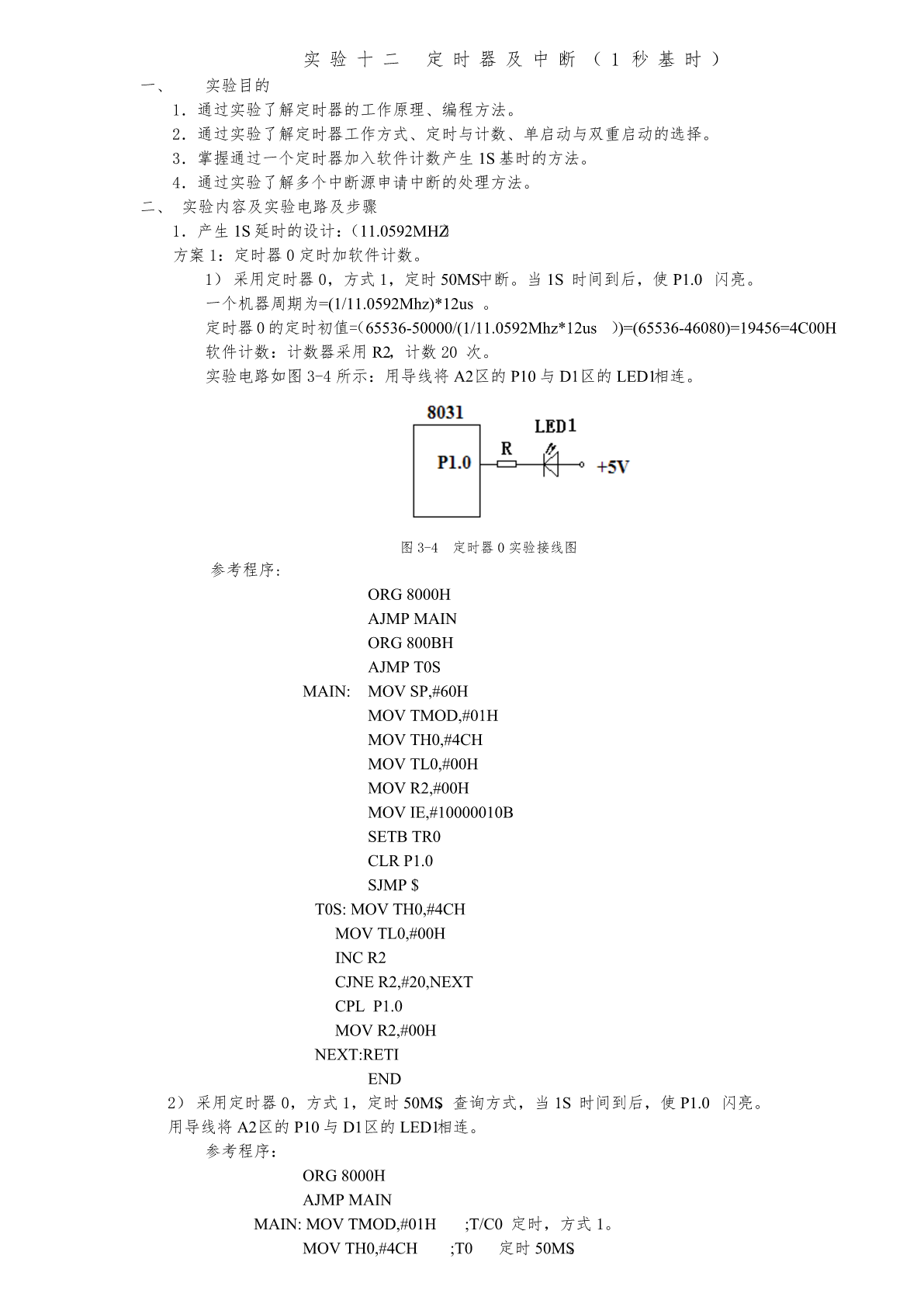
实验十二定时器及中断(1秒基时)一、实验目的1.通过实验了解定时器的工作原理、编程方法。2.通过实验了解定时器工作方式、定时与计数、单启动与双重启动的选择。3.掌握通过一个定时器加入软件计数产生1S基时的方法。4.通过实验了解多个中断源申请中断的处理方法。二、实验内容及实验电路及步骤1.产生1S延时的设计:(11.0592MHZ)方案1:定时器0定时加软件计数。1)采用定时器0,方式1,定时50MS中断。当1S时间到后,使P1.0闪亮。一个机器周期为=(1/11.0592Mhz)*12us。定时器0的定时

STM32定时器中断实验.ppt
ALIENTEK

单片机实验_中断、定时器.pdf

实验三-定时器计数器及中断实验.ppt
二、实验原理二、实验原理二、实验原理二、实验原理二、实验原理二、实验原理二、实验内容和步骤二、实验内容和步骤二、实验内容和步骤二、实验内容和步骤精品课件!精品课件!思考题