
基于压电陶瓷驱动的腹腔手术微型机器人.pdf

as****16


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于压电陶瓷驱动的腹腔手术微型机器人.pdf
第��卷第�期机器人∂��������������年�月ΡΟΒΟΤ�∏�������文章编号�����2������������2����2��基于压电陶瓷驱动的腹腔手术微型机器人关节驱动部件研究Ξ马记�吴月华�许�杜华生�杨杰�中国科学技术大学精密机械与精密仪器系合肥�������摘要�本文简要介绍了一个基于压电陶瓷驱动的腹腔手术用微型机器人系统�重点叙述了微型机器人关节驱动部件的结构设计方案及其实现�对所设计的柔性铰链进行了定量力学分析�并通过实验证明采用柔性铰链来实现驱动位移的放大是确实可行的�关键

基于压电陶瓷的环境振动驱动微型压电发电装置设计.docx
基于压电陶瓷的环境振动驱动微型压电发电装置设计摘要:本文设计了一种基于压电陶瓷的环境振动驱动微型压电发电装置。首先,介绍了压电陶瓷的基本原理和特性,以及压电发电技术的应用场景。接着,详细描述了设计方案,包括压电陶瓷的选型、振动传感器的设计、功率电子转换电路的设计等。然后,进行了实验验证,测试了该装置在不同振动条件下的电性能,结果表明该装置具有较高的发电效率。最后,对该装置的优缺点进行了总结,并对未来的研究方向提出了展望。关键词:压电陶瓷;振动驱动;微型压电发电装置;电性能;优缺点1.引言随着环境保护意识的
基于全压电陶瓷驱动的线性驱动装置.pdf
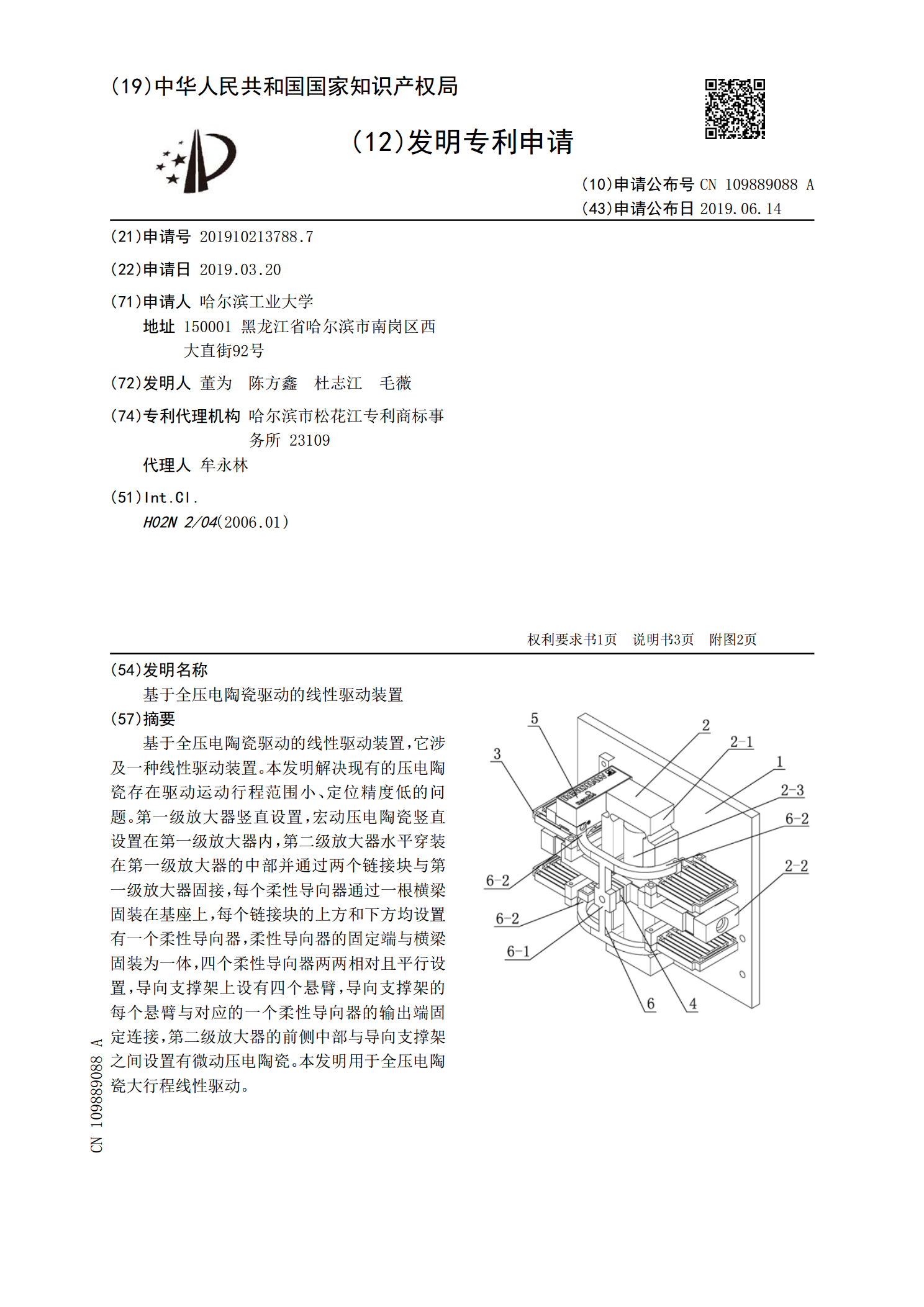
基于全压电陶瓷驱动的线性驱动装置,它涉及一种线性驱动装置。本发明解决现有的压电陶瓷存在驱动运动行程范围小、定位精度低的问题。第一级放大器竖直设置,宏动压电陶瓷竖直设置在第一级放大器内,第二级放大器水平穿装在第一级放大器的中部并通过两个链接块与第一级放大器固接,每个柔性导向器通过一根横梁固装在基座上,每个链接块的上方和下方均设置有一个柔性导向器,柔性导向器的固定端与横梁固装为一体,四个柔性导向器两两相对且平行设置,导向支撑架上设有四个悬臂,导向支撑架的每个悬臂与对应的一个柔性导向器的输出端固定连接,第二级放

基于转轨驱动的压电陶瓷驱动电源的综述报告.docx
基于转轨驱动的压电陶瓷驱动电源的综述报告压电陶瓷是一种具有压电效应的陶瓷材料,可以将机械能转化为电能,同时也可将电能转化为机械能。压电陶瓷具有体积小、重量轻、精度高等优点,因此在精密驱动领域中得到了广泛应用。其中,压电陶瓷的驱动电源是实现压电陶瓷驱动的关键。目前,基于转轨驱动的压电陶瓷驱动电源是一种被广泛应用的技术,本文将对其进行综述。一、压电陶瓷驱动原理压电陶瓷具有压电效应,即应变与电荷之间存在线性关系。当压电陶瓷受到外力作用时,会产生应变,进而导致内部的电荷分布发生改变,从而产生电势差。反过来,当施加

基于电荷反馈控制的压电陶瓷驱动电源研究.docx
基于电荷反馈控制的压电陶瓷驱动电源研究基于电荷反馈控制的压电陶瓷驱动电源研究摘要:电荷反馈控制技术是一种常用于压电陶瓷驱动电源的控制方式。本论文通过对基于电荷反馈控制的压电陶瓷驱动电源的研究,探讨了其原理、特点、优缺点以及应用前景。通过实验验证了该技术的有效性和可行性,并提出了优化设计方案,以进一步提高压电陶瓷驱动电源的性能。1.引言压电陶瓷是一种具有优异的电-机-热耦合特性的材料,被广泛应用于精密仪器、超声波传感、压电致动器等领域。然而,为了驱动压电陶瓷,在应用中通常需要一个高稳定性和高精度的驱动电源。