
浮动车信息采集系统功能及其设计.docx

和蔼****娘子


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
浮动车信息采集系统功能及其设计.docx
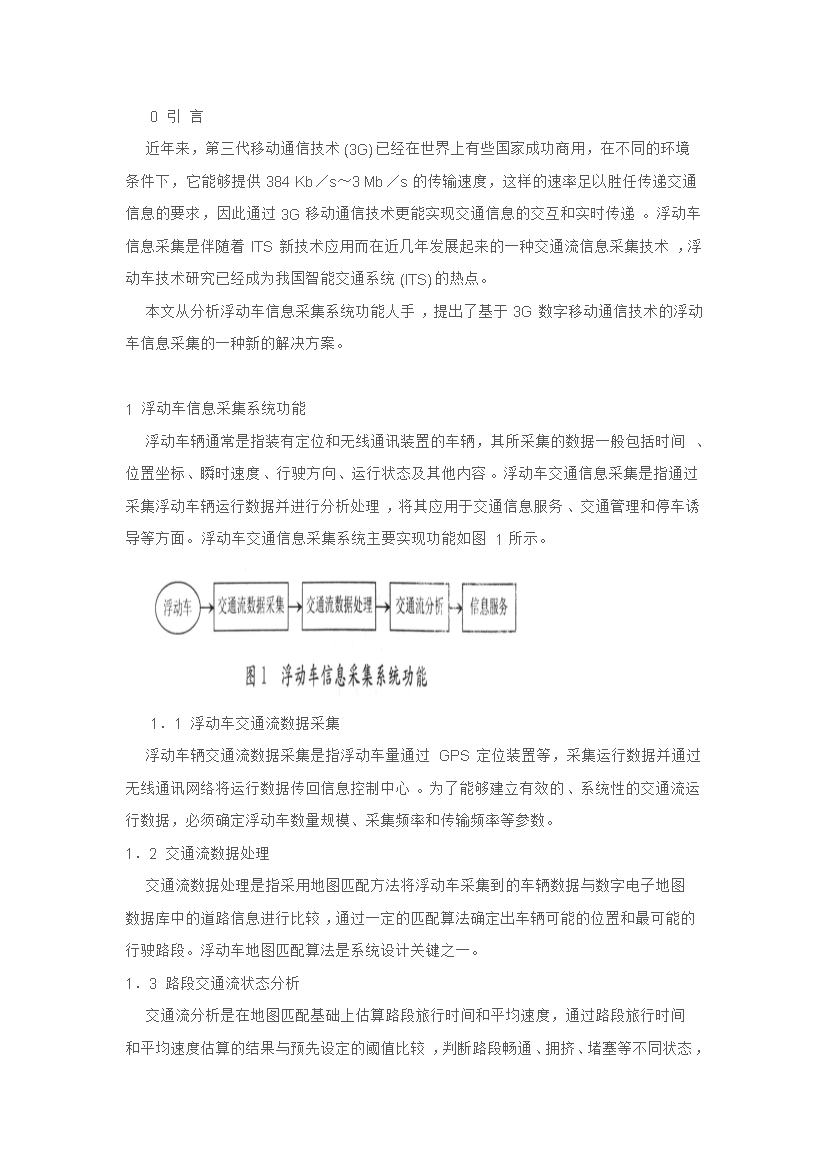
0引言近年来,第三代移动通信技术(3G)已经在世界上有些国家成功商用,在不同的环境条件下,它能够提供384Kb/s~3Mb/s的传输速度,这样的速率足以胜任传递交通信息的要求,因此通过3G移动通信技术更能实现交通信息的交互和实时传递。浮动车信息采集是伴随着ITS新技术应用而在近几年发展起来的一种交通流信息采集技术,浮动车技术研究已经成为我国智能交通系统(ITS)的热点。本文从分析浮动车信息采集系统功能人手,提出了基于3G数字移动通信技术的浮动车信息采集的一种新的解决方案。1浮动车信息采集系统功能浮动车辆通

浮动车信息采集系统功能及其设计.docx
0引言近年来,第三代移动通信技术(3G)已经在世界上有些国家成功商用,在不同的环境条件下,它能够提供384Kb/s~3Mb/s的传输速度,这样的速率足以胜任传递交通信息的要求,因此通过3G移动通信技术更能实现交通信息的交互和实时传递。浮动车信息采集是伴随着ITS新技术应用而在近几年发展起来的一种交通流信息采集技术,浮动车技术研究已经成为我国智能交通系统(ITS)的热点。本文从分析浮动车信息采集系统功能人手,提出了基于3G数字移动通信技术的浮动车信息采集的一种新的解决方案。1浮动车信息采集系统功能浮动车辆通
浮动车信息采集系统功能及其设计.docx
0引言近年来,第三代移动通信技术(3G)已经在世界上有些国家成功商用,在不同的环境条件下,它能够提供384Kb/s~3Mb/s的传输速度,这样的速率足以胜任传递交通信息的要求,因此通过3G移动通信技术更能实现交通信息的交互和实时传递。浮动车信息采集是伴随着ITS新技术应用而在近几年发展起来的一种交通流信息采集技术,浮动车技术研究已经成为我国智能交通系统(ITS)的热点。本文从分析浮动车信息采集系统功能人手,提出了基于3G数字移动通信技术的浮动车信息采集的一种新的解决方案。1浮动车信息采集系统功能浮动车辆通

浮动车信息采集系统功能及其设计.docx
0引言近年来,第三代移动通信技术(3G)已经在世界上有些国家成功商用,在不同的环境条件下,它能够提供384Kb/s~3Mb/s的传输速度,这样的速率足以胜任传递交通信息的要求,因此通过3G移动通信技术更能实现交通信息的交互和实时传递。浮动车信息采集是伴随着ITS新技术应用而在近几年发展起来的一种交通流信息采集技术,浮动车技术研究已经成为我国智能交通系统(ITS)的热点。本文从分析浮动车信息采集系统功能人手,提出了基于3G数字移动通信技术的浮动车信息采集的一种新的解决方案。1浮动车信息采集系统功能浮动车辆通

浮动车信息采集系统功能及其设计.docx
0引言近年来,第三代移动通信技术(3G)已经在世界上有些国家成功商用,在不同的环境条件下,它能够提供384Kb/s~3Mb/s的传输速度,这样的速率足以胜任传递交通信息的要求,因此通过3G移动通信技术更能实现交通信息的交互和实时传递。浮动车信息采集是伴随着ITS新技术应用而在近几年发展起来的一种交通流信息采集技术,浮动车技术研究已经成为我国智能交通系统(ITS)的热点。本文从分析浮动车信息采集系统功能人手,提出了基于3G数字移动通信技术的浮动车信息采集的一种新的解决方案。1浮动车信息采集系统功能浮动车辆通