
机炉协调控制.ppt

kp****93


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共56页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机炉协调控制.pdf
随着大型热力发机电组日益增多,单机容量不断增大,采用中间再热的机组也逐渐增加。为便于进行燃烧调整,提高循环效率。汽轮机、锅炉联合运行时,大容量机、炉都采用了单元制热力系统,单元机组的负荷适应性相对较差,汽轮机中、低压缸功率滞后明显,一次调频能力降低。为改善单元机组的调节性能,提高电网自动化水平,加强机、炉运行的稳定性,目前单元制机组都采用机、炉联合控制的方式进行运行调节。答:为改善单元机组的调节特性,增强其负荷适应性,提高一次调频能力,在单元机组中,普通都采用机、炉联合控制方式进行运行调节,也即将功率、转

机炉协调控制.ppt
大型单元机组的生产过程及其对控制的要求单元制机组热力发电过程§1单元机组负荷控制系统对象特性GpB(s)二、负荷控制基本方案2.汽机跟踪方式(机跟炉)3.解耦控制2)对角矩阵法等效系统为4.机炉协调方式一、间接能量平衡协调控制系统以炉跟机为基础的单向解耦协调控制系统(一)F(x)为带有死区的非线性环节,有利于提高协调控制系统的稳定性。死区的大小决定了蓄能的利用,兼顾负荷适应性与运行稳定性,斜率的选择取决于压力偏差动态校正的速度。以炉跟机为基础的单向解耦协调控制系统(二)F(t)为比例为分环节,有利于改善锅

机炉协调控制方案浅析.docx
机炉协调控制方案浅析一、引言随着工业自动化技术的快速发展,机炉控制技术也得到了很大的提升。机炉的协调控制方案是机炉控制的关键部分之一,也是控制系统性能的重要体现。本文将对机炉协调控制方案进行浅析。二、机炉协调控制的意义机炉作为工业制造领域的重要设备,其协调控制方案的制定直接影响着整个系统的稳定性和生产效率。良好的机炉协调控制方案能够提高机炉的工作效率,降低运行成本,保证生产质量,提高企业效益。三、机炉协调控制方案的应用机炉协调控制方案的应用涉及到多个方面,下面对其中的几个方面进行简要介绍:1.预热系统控制

单元机组机炉协调控制ppt.ppt
大型单元机组的生产过程及其对控制的要求单元制机组热力发电过程§1单元机组负荷控制系统对象特性GpB(s)二、负荷控制基本方案2.汽机跟踪方式(机跟炉)3.解耦控制2)对角矩阵法等效系统为4.机炉协调方式一、间接能量平衡协调控制系统以炉跟机为基础的单向解耦协调控制系统(一)F(x)为带有死区的非线性环节,有利于提高协调控制系统的稳定性。死区的大小决定了蓄能的利用,兼顾负荷适应性与运行稳定性,斜率的选择取决于压力偏差动态校正的速度。以炉跟机为基础的单向解耦协调控制系统(二)F(t)为比例为分环节,有利于改善锅
响应电网调频的机炉协调自主切换控制方法.pdf
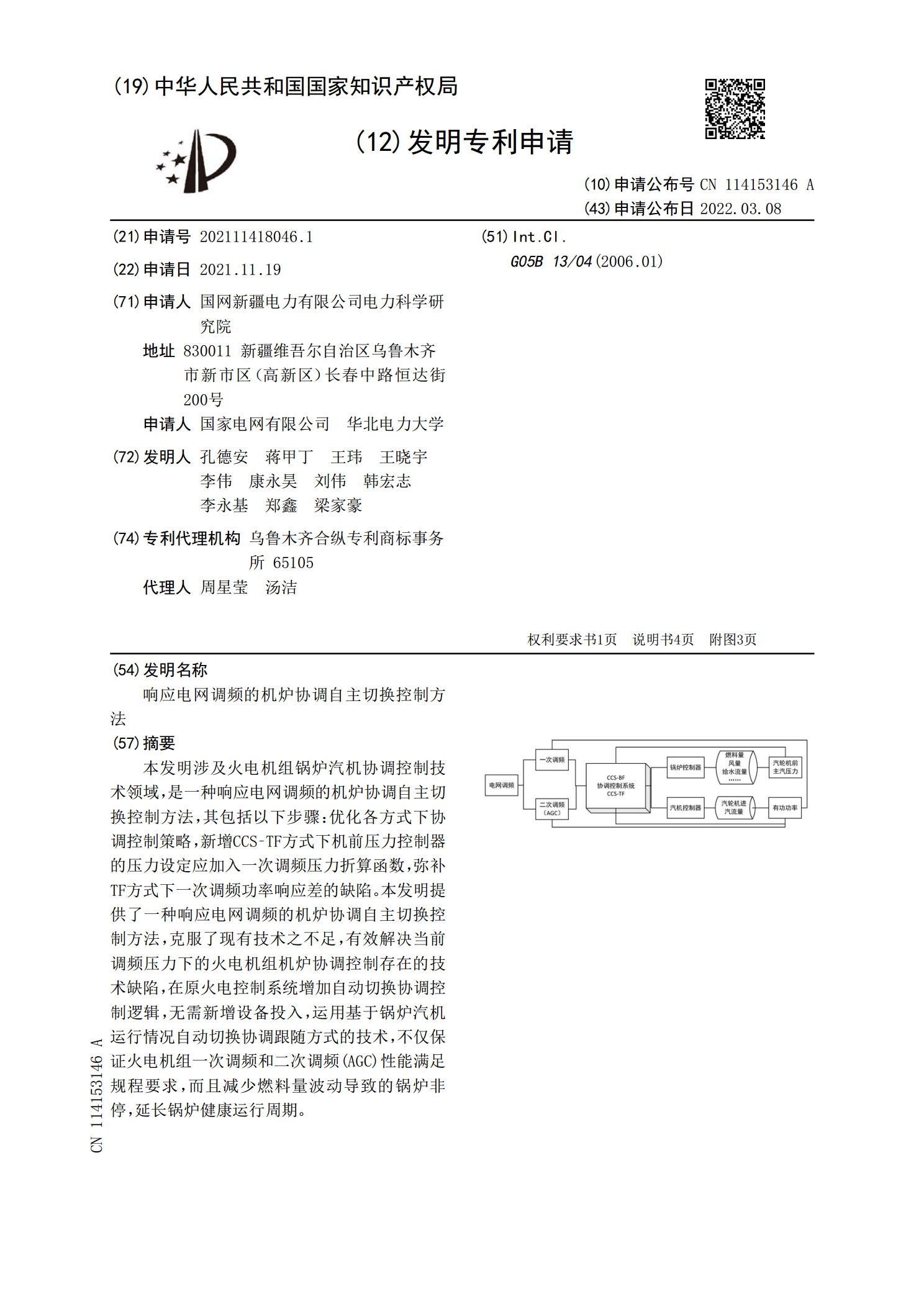
本发明涉及火电机组锅炉汽机协调控制技术领域,是一种响应电网调频的机炉协调自主切换控制方法,其包括以下步骤:优化各方式下协调控制策略,新增CCS‑TF方式下机前压力控制器的压力设定应加入一次调频压力折算函数,弥补TF方式下一次调频功率响应差的缺陷。本发明提供了一种响应电网调频的机炉协调自主切换控制方法,克服了现有技术之不足,有效解决当前调频压力下的火电机组机炉协调控制存在的技术缺陷,在原火电控制系统增加自动切换协调控制逻辑,无需新增设备投入,运用基于锅炉汽机运行情况自动切换协调跟随方式的技术,不仅保证火电机