
空间3-PUS-UP并联机构运动灵巧性与刚度性能研究.pdf

as****16


1/7
2/7

3/7

4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

空间3-PUS-UP并联机构运动灵巧性与刚度性能研究.pdf
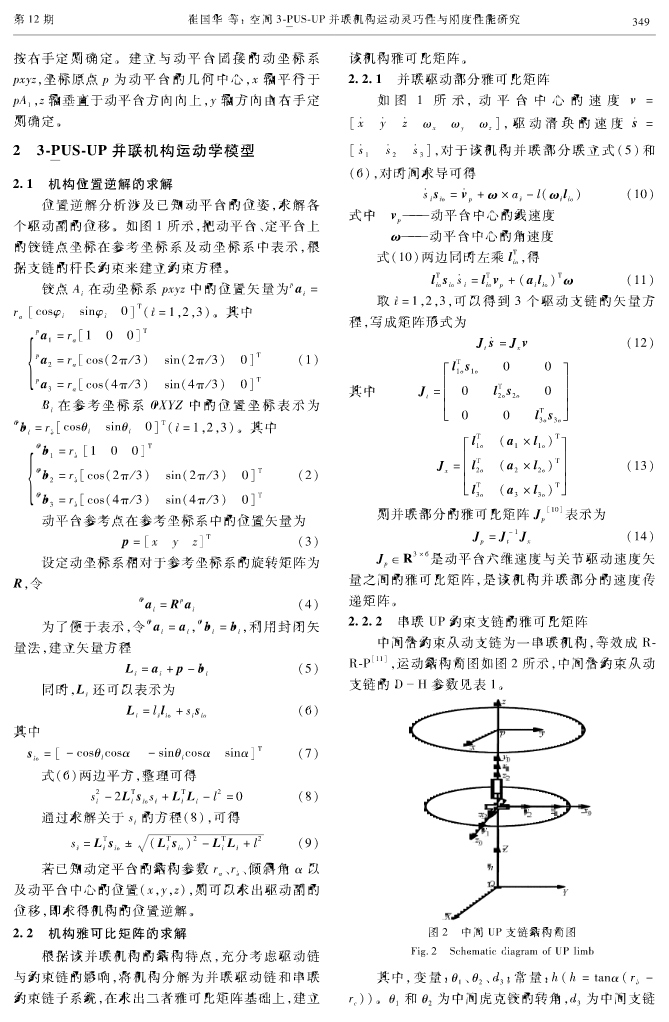
2014年12月农业机械学报第45卷第12期doi:10.6041/j.issn.10001298.2014.12.050空间3PUSUP并联机构运动灵巧性与刚度性能研究崔国华1张海强2徐丰2孙传荣2(1.河北工程大学装备制造学院,邯郸056038;2.河北工程大学机电工程学院,邯郸056038)摘要:以含中间支链的3自由度3PUSUP并联机构为研究对象,充分考虑驱动支链、串联约束支链及末端平台伴随运动的影响,利用封闭矢量法求解位置逆解,建立并联驱动部分的雅可比矩阵;采用DH法建立中间UP串联

并联机构3-SPSS的静、动态刚度性能研究.docx
并联机构3-SPSS的静、动态刚度性能研究一、引言并联机构是一种常见的机械结构,其结构优点主要体现在其高刚度、高精度和高稳定性方面。其中,机构的静、动态刚度性能是衡量机构性能的一个非常重要的指标。本文将以并联机构3-SPSS为研究对象,探究其静、动态刚度性能。二、并联机构3-SPSS并联机构3-SPSS是一种三自由度空间并联机构,由三个串联的SPS(球面副)结构组成。该机构的结构简单、紧凑,刚度高,精度较高,广泛应用于机械加工、控制和运动学研究等领域。三、静刚度性能研究静刚度性能是指在固定位置静止时机构的

新型含子闭环并联机构的灵巧性研究.docx
新型含子闭环并联机构的灵巧性研究标题:新型含子闭环并联机构的灵巧性研究摘要:新型含子闭环并联机构是一种具有灵巧性的机械结构,在机器人领域有着广泛的应用。本文针对新型含子闭环并联机构的灵巧性进行研究,从机构构造、运动学分析、力学特性和应用等方面进行讨论与研究,并通过数值仿真和实验验证,阐明了该机构的优势和局限性。关键词:新型含子闭环并联机构;灵巧性;运动学分析;力学特性;应用1.引言1.1研究背景与意义1.2国内外研究现状与发展动态1.3论文研究及组织结构2.新型含子闭环并联机构构造2.1机构组成与作用原理

一种空间三平移并联机构的运动学性能与仿真研究.docx
一种空间三平移并联机构的运动学性能与仿真研究Title:KinematicPerformanceandSimulationStudyofaSpatialThree-TranslationParallelMechanismAbstract:Thestudyaimstoinvestigatethekinematicperformanceandconductasimulationanalysisofaspatialthree-translationparallelmechanism.Theparallelmec

新型大工作空间并联机构及其性能研究的任务书.docx
新型大工作空间并联机构及其性能研究的任务书任务书一、任务背景目前,随着全球经济的快速发展和科技的不断进步,工业生产和制造需要更加高效、精确、灵活的机器人。机器人的工作空间是机器人控制的最基本和重要的参数之一,对机器人的运动范围和灵活性有着决定性的影响。因此,研究和开发具有更大、更灵活的工作空间的并联机构,成为了目前机器人研究的热点之一。二、任务目的本次任务旨在研究新型大工作空间并联机构及其性能,通过数值仿真和实验验证,为机器人的工作空间扩展提供技术支持。具体任务目标如下:1.研究新型大工作空间并联机构的基