
CN2022109455505融合挡位优化的商用车预见性节能巡航分层控制方法.pdf

13****40

1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
CN2022109455505融合挡位优化的商用车预见性节能巡航分层控制方法.pdf
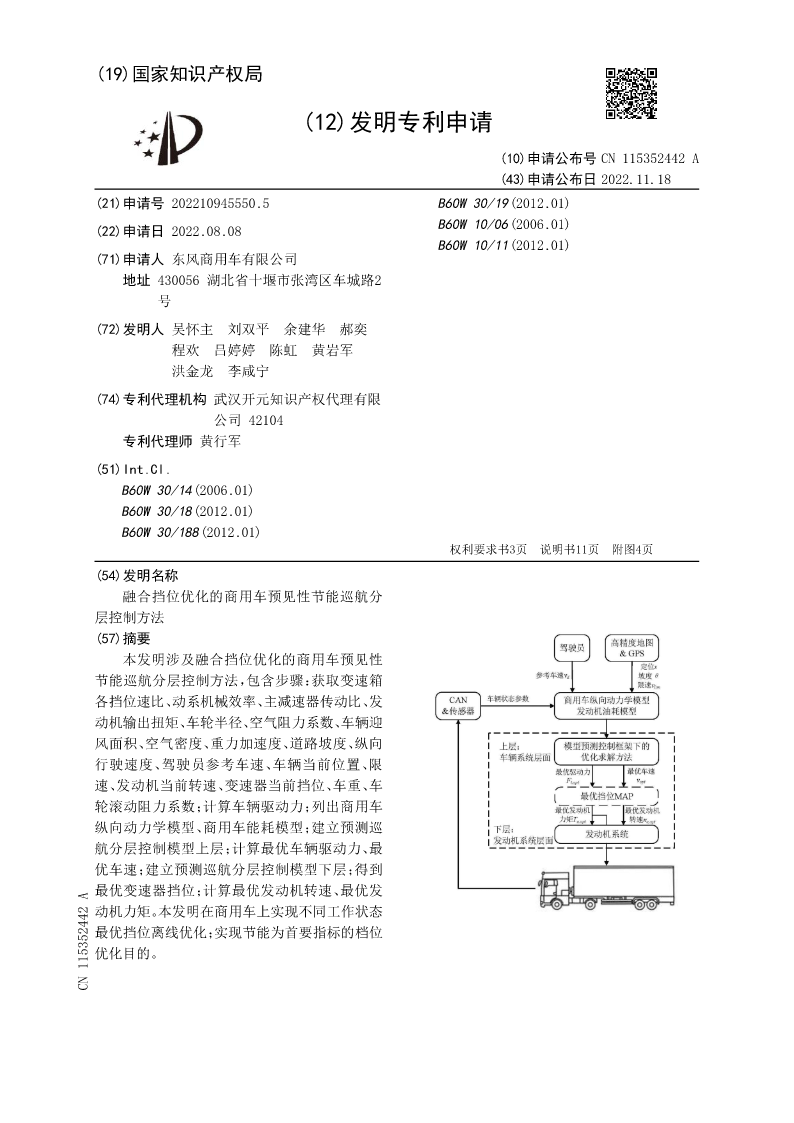
(19)国家知识产权局(12)发明专利申请(10)申请公布号CN115352442A(43)申请公布日2022.11.18(21)申请号202210945550.5B60W30/19(2012.01)(22)申请日2022.08.08B60W10/06(2006.01)B60W10/11(2012.01)(71)申请人东风商用车有限公司地址430056湖北省十堰市张湾区车城路2号(72)发明人吴怀主刘双平余建华郝奕程欢吕婷婷陈虹黄岩军洪金龙李咸宁(74)专利代理机构武汉开元知识产权代理有限公司42104专
一种预见性巡航节油控制方法、装置及存储介质.pdf
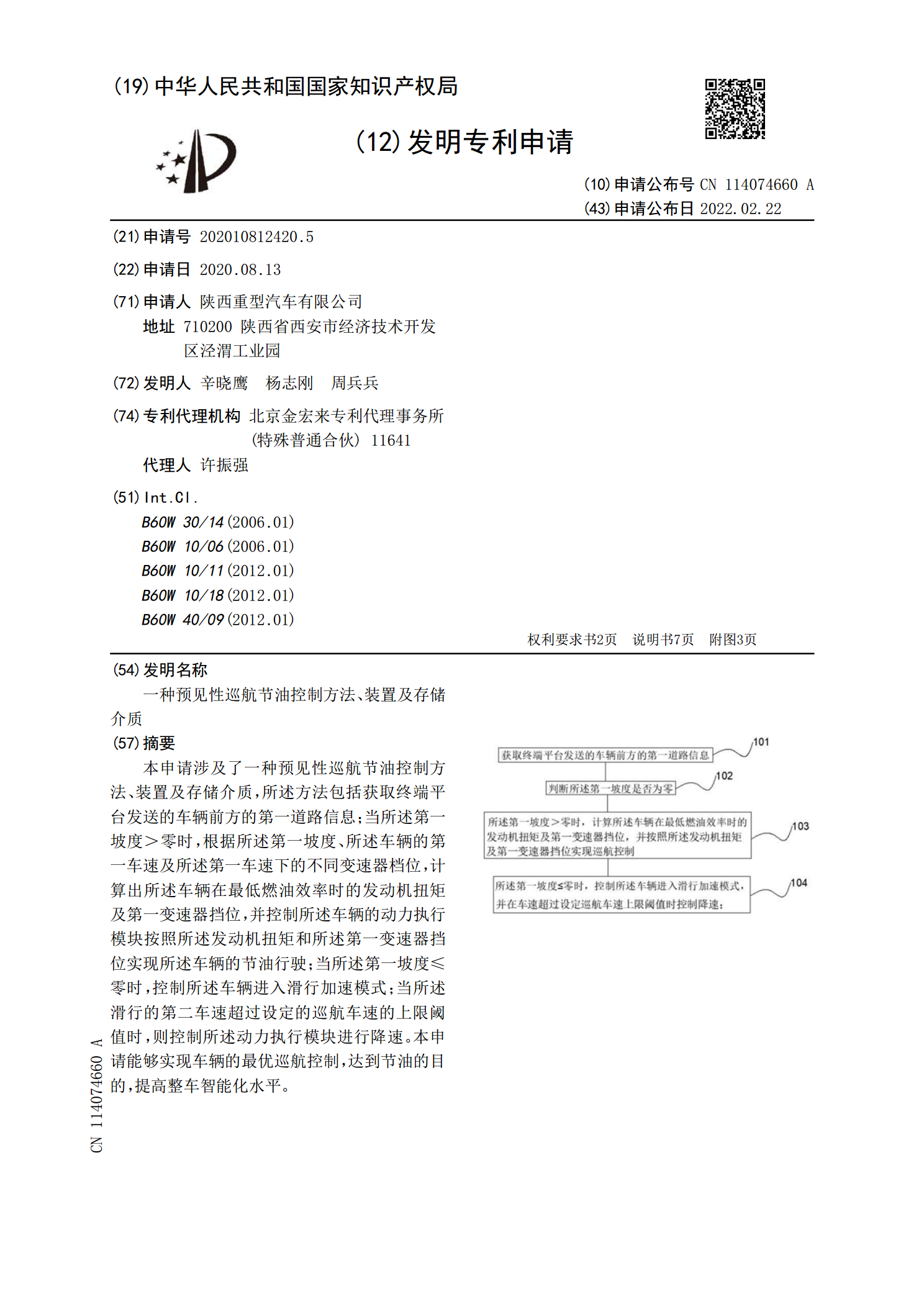
本申请涉及了一种预见性巡航节油控制方法、装置及存储介质,所述方法包括获取终端平台发送的车辆前方的第一道路信息;当所述第一坡度>零时,根据所述第一坡度、所述车辆的第一车速及所述第一车速下的不同变速器档位,计算出所述车辆在最低燃油效率时的发动机扭矩及第一变速器挡位,并控制所述车辆的动力执行模块按照所述发动机扭矩和所述第一变速器挡位实现所述车辆的节油行驶;当所述第一坡度≤零时,控制所述车辆进入滑行加速模式;当所述滑行的第二车速超过设定的巡航车速的上限阈值时,则控制所述动力执行模块进行降速。本申请能够实现车辆的最
运行电子挡位控制系统的方法、电子挡位控制系统、机动车.pdf
本发明涉及一种用于运行机动车的电子挡位控制系统的方法、电子挡位控制系统以及机动车。该方法包括以下步骤:接收输入信号;根据所接收的输入信号计算出电子挡位控制系统的目标模式;基于目标模式检查是否满足可行性条件;如果判定可行性条件得到满足,则将目标模式输出给执行设备;如果可行性条件未得到满足,则转换到安全模式或维持当前状态。
基于分层优化的多源融合定位方法.pptx
汇报人:CONTENTS添加章节标题分层优化方法分层优化的概念分层优化的原理分层优化的应用场景分层优化的优势多源融合定位方法多源融合定位的概念多源融合定位的原理多源融合定位的常见方法多源融合定位的优势基于分层优化的多源融合定位方法方法概述分层优化的实现方式多源融合定位的实现方式方法的应用场景和优势实验验证与结果分析实验设置与数据采集实验结果展示与分析结果与现有方法的比较方法的局限性与未来工作方向汇报人:

基于MPC分层控制的自适应巡航策略.docx
基于MPC分层控制的自适应巡航策略1.内容描述本文档主要介绍了基于MPC分层控制的自适应巡航策略。MPC(ModelPredictiveControl)是一种先进的控制策略,通过建立系统的数学模型,对未来一段时间内的状态和控制输入进行预测,从而实现对系统性能的最优化控制。自适应巡航策略则是一种根据车辆与前车之间的距离、速度、加速度等参数自动调整巡航速度和跟车距离的技术,以提高驾驶舒适性和安全性。在本文档中,我们首先分析了MPC分层控制的基本原理和优势,然后详细介绍了基于MPC分层控制的自适应巡航策略的设计