
太阳能自动跟踪机械装置.doc

kp****93


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

太阳能自动跟踪机械装置.doc
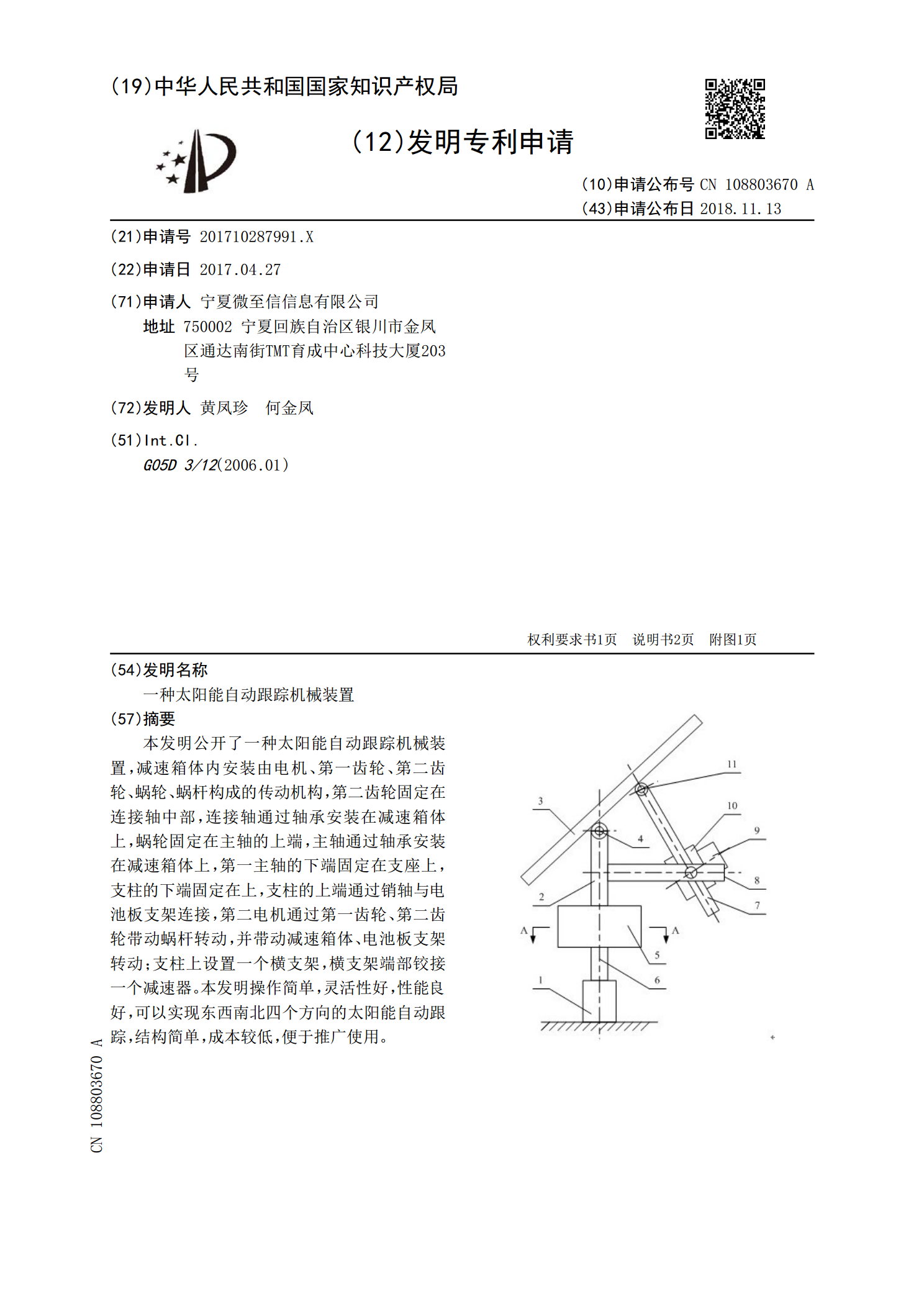
太阳能自动跟踪装置原理图1-支座;2-支柱;3-电池板支架;4-销轴;5-减速箱体;6、15-主轴;7-丝杆;8-横支架;9、18-电机;10-减速器;11-铰链;12、13-齿轮;14-连接轴;16-蜗轮;17-蜗杆1.东西方向跟踪在减速箱体5内安装由电机18、齿轮12、13、蜗轮16、蜗杆17构成的传动机构。齿轮13固定在连接轴14中部,连接轴通过轴承安装在减速箱体上,蜗轮16固定在主轴6的上端,主轴通过轴承安装在减速箱体上,主轴的下端固定在支座1上,支柱2的下端固定在减速箱体上,支柱2的上端通过销轴

太阳能自动跟踪装置.pdf
一种太阳能自动跟踪装置,包括底座、太阳能电池接收器、方位角转动组件、高度角转动组件和太阳能跟踪传感器。方位角转动组件包括方位角转动支架,该支架经方位角转动立轴和蜗轮蜗杆传动副与方位角传动电机动连接。高度角转动组件包括固定在太阳能电池板支架背阳面上高度角转动横轴和销齿导轨,安装在方位角转动支架翼板上的销齿齿轮与销齿导轨内的销齿齿链滚动连接,销齿齿轮的轮轴与高度角转动电机的输出轴动连接。太阳能电池板的向阳面上装有太阳能跟踪传感器,太阳能跟踪传感器能在检测的同时,自行控制方位角传动电机和高度角转动电
一种太阳能自动跟踪机械装置.pdf
本发明公开了一种太阳能自动跟踪机械装置,减速箱体内安装由电机、第一齿轮、第二齿轮、蜗轮、蜗杆构成的传动机构,第二齿轮固定在连接轴中部,连接轴通过轴承安装在减速箱体上,蜗轮固定在主轴的上端,主轴通过轴承安装在减速箱体上,第一主轴的下端固定在支座上,支柱的下端固定在上,支柱的上端通过销轴与电池板支架连接,第二电机通过第一齿轮、第二齿轮带动蜗杆转动,并带动减速箱体、电池板支架转动;支柱上设置一个横支架,横支架端部铰接一个减速器。本发明操作简单,灵活性好,性能良好,可以实现东西南北四个方向的太阳能自动跟踪,结构简

太阳能自动跟踪装置的设计.doc
分类号编号烟台大学文经学院毕业设计太阳能自动跟踪装置设计Thedesignofsolarautomatictrackingdevice申请学位:工学学位院系:机电工程系专业:机械设计制造及其自动化姓名:李显学号:6206指导老师:李春植(专家)张芹英(助教)5月26日太阳能自动跟踪装置设计姓名:李显导师:李春植(专家)张芹英(助教)5月26日烟台大学文经学院毕业论文(设计)任务书院(系):机电工程系姓名李显学号6206毕业届别专业机械设计制造及其自动化毕业论文(设计)题目太阳能自动跟踪装置设计指导教师李春

自动跟踪太阳能发电装置.pdf
本发明是关于一种自动跟踪太阳能发电装置,其中包含有太阳能电池,太阳能电池支架,太阳能电池设于该太阳能电池支架上,在太阳能电池上方的东西方向设有感光器,通过挡板的遮挡感光器输出信号,输出信号用于控制水平转动的步进电机。步进电机通过齿轮和半圆齿条驱动太阳能电池支架用以旋转调整太阳能电池与太阳的东西角度。太阳能电池支架与太阳的仰角角度由储能媒介相变所导致的压力增减令该伸缩装置产生伸缩而改变该太阳能板的仰角角度,从而实现了太阳能发电的全方位跟踪,比固定式太阳能发电装置提高30%-50%的太阳光利用率。