
《汽车操纵稳定性》.ppt

15****92

1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共169页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

《汽车操纵稳定性》.ppt
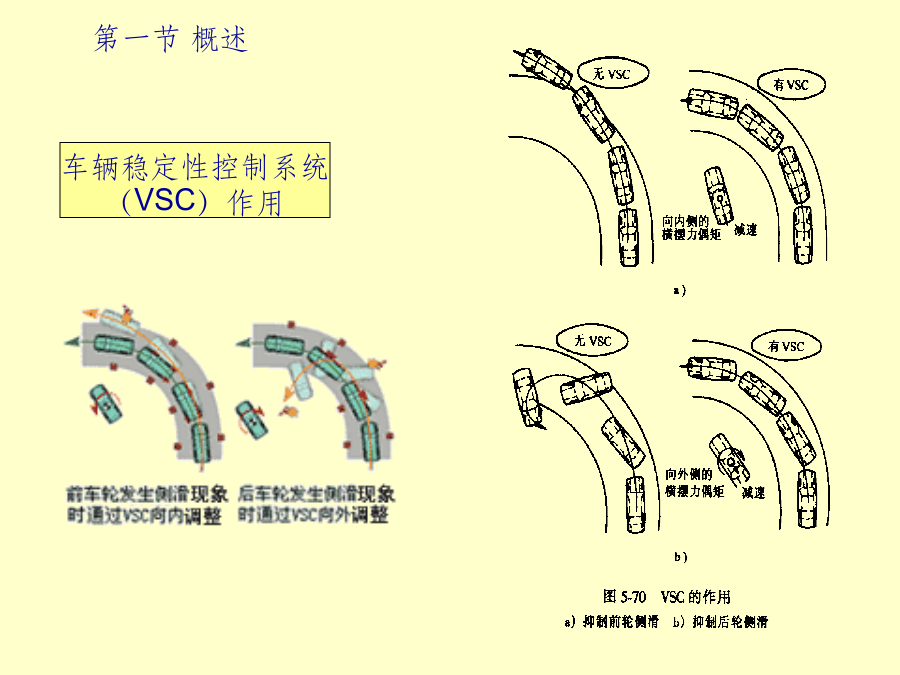
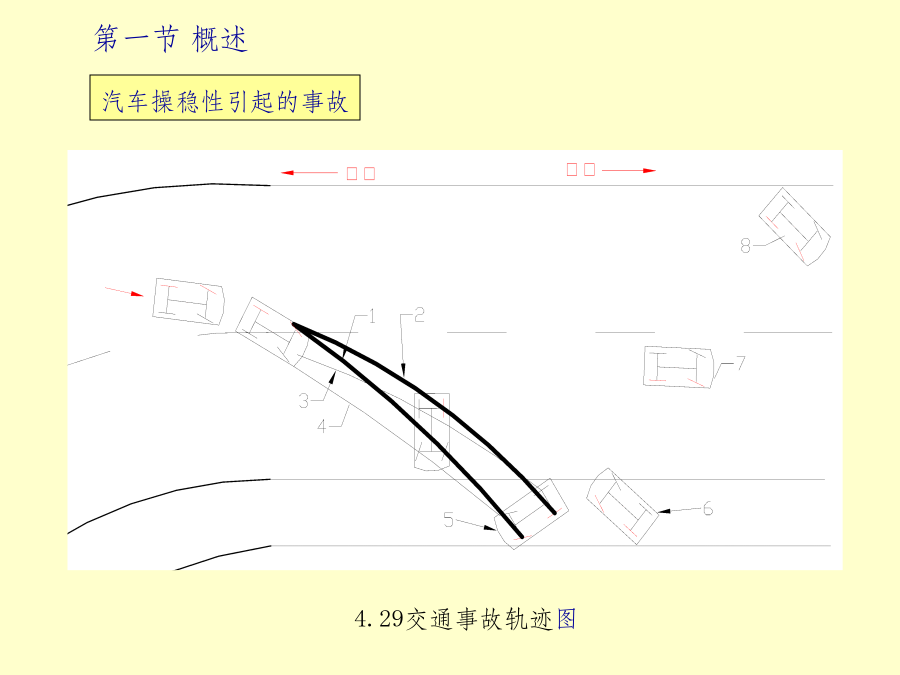
汽车的操纵稳定性第六章汽车操纵稳定性a.汽车正确遵循驾驶员通过操纵机构所给定的方向的能力;1、“飘”—汽车自己改变方向。升力或转向系、轮胎、悬架等问题。2、“反应迟钝”—转向反映慢。传动比太大。3、“晃”—左右摇摆,行驶方向难于稳定。4、“丧失路感”—操纵稳定性不好的汽车在高速或急剧转向时会丧失路感,导致驾驶员判断的困难。5、“失控”—某些工况下汽车不能控制方向。制动时无法转向,甩尾,侧滑,侧翻。第一节概述制动跑偏第一节概述第一节概述四轮转向系统4WS作用第一节概述第一节概述第一节概述第一节概述第一节概述

汽车操纵稳定性.docx
汽车操纵稳定性汽车操纵稳定性1.汽车行驶的纵向稳定性汽车在纵向坡道上行驶,例如等速上坡,随着道路坡度增大,前轮的地面法向反作用力不断减小。当道路坡度大到一定程度时,前轮的地面法向反作用力为零。在这样的坡度下,汽车将失去操纵性,并可能产生纵向翻倒。汽车上坡时,坡度阻力随坡度的增大而增加,在坡度大到一定程度时,为克服坡度阻力所需的驱动力超过附着力时,驱动轮将滑转。这两种情况均使汽车的行驶稳定性遭到破坏。2.汽车横向稳定性汽车横向稳定性的丧失,表现为汽车的侧翻或横向滑移。由于侧向力作用而发生的横向稳定性破坏的可

汽车理论汽车操纵稳定性.pptx
15汽车操纵稳定性1、飘:无指令时,汽车行驶飘浮;2、贼:不听指令,左右乱闯,贼头贼脑;3、晃:转向时,行驶不稳;4、反映迟钝:接到指令时,半天才反应;5、丧失路感:人员操纵车,无法感觉路面状况;6、失去控制:指令失控。定义:在驾驶员不感觉过分紧张、疲劳的条件下,汽车能按照驾驶员通过转向系及转向车轮给定的方向行驶,且当受到外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力。内容输入:角输入、力输入响应:时域响应、频域响应。汽车在转向盘输入或外界干扰输入下的侧向运动响应随时间而变化的特性称为时域响应特性。转

汽车理论汽车的操纵稳定性.ppt
汽车的操纵稳定性是指在驾驶者不感到过分紧张、疲劳的情况下,汽车能遵循驾驶者通过转向系统及转向车轮给定的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力。汽车的操纵稳定性是汽车主动安全性的重要评价指标。第一节概述汽车在转向盘输入或外界干扰输入下的侧向运动响应随时间而变化的特性称为时域响应特性。转向盘输入有角位移输入和力矩输入。外界干扰输入主要是指侧向风和路面不平产生的侧向力。1.转向盘角阶跃输入下的响应转向盘转角正弦输入下,频率由0→∞变化时,汽车横摆角速度与转向盘转角的振幅比及相

《汽车操操纵稳定性》.ppt
汽车的操纵稳定性5.1汽车操纵稳定性研究的主要内容5.2汽车极限行驶稳定性5.3轮胎的侧偏特性5.4汽车的转向特性5.5汽车转向轮的振动5.6转向轮的稳定效应5.1汽车操纵稳定性研究的主要内容1、极限行驶稳定性横向倾翻的最大坡度;横向倾翻的最大车速;纵向行驶稳定性。5.2汽车极限行驶稳定性静态受力分析如右图示:下面进一步分析汽车侧滑在翻倾之前的条件:b.发生侧滑条件:c、侧滑在翻倾之前的条件2.横向倾翻的最大车速在离心力Fc的作用下,汽车可能以A’为支点向外侧翻,当Fzr=0时,汽车将失去横向稳定性而开始