
脉冲激光引信信号处理技术研究.pdf

as****16


1/4

2/4
3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
脉冲激光引信信号处理技术研究.pdf
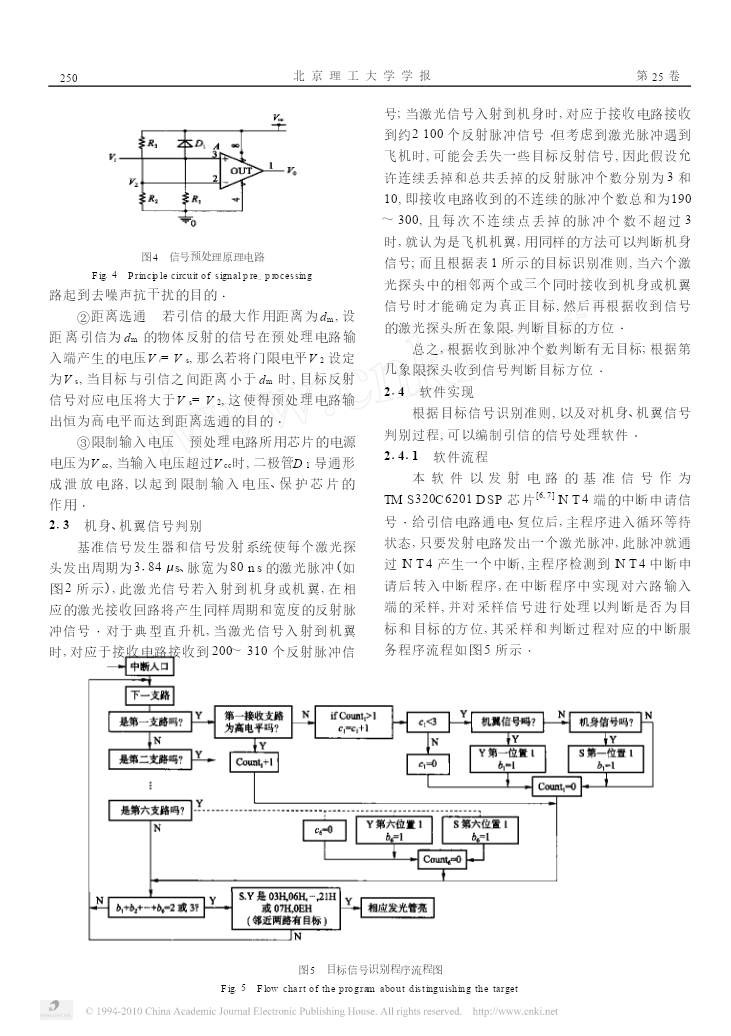
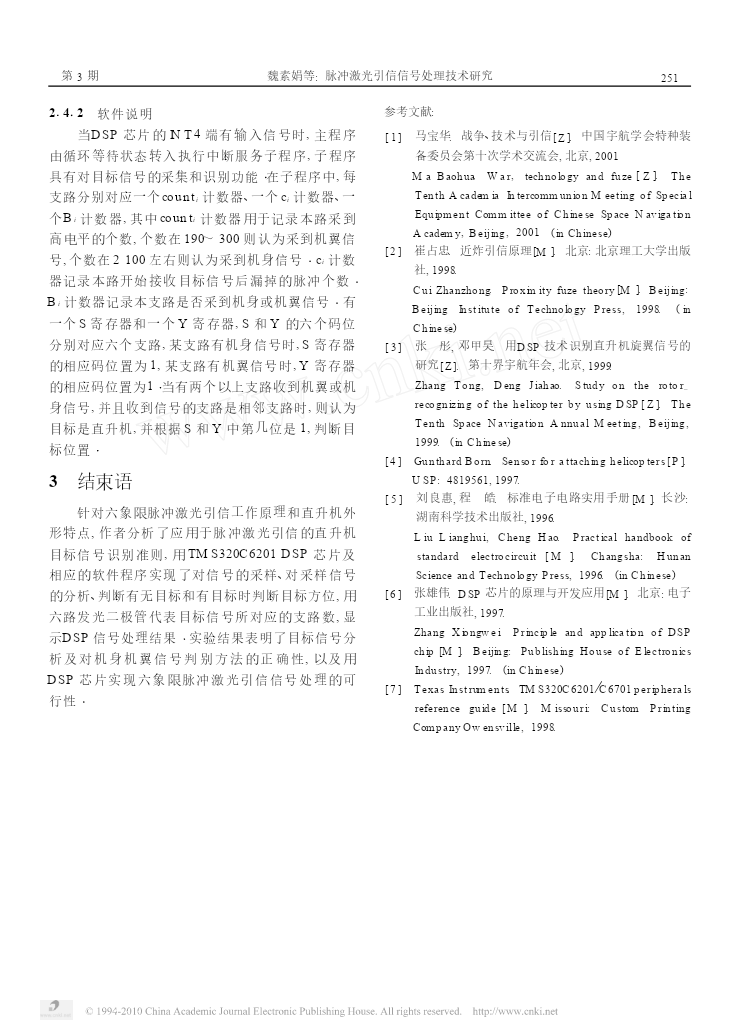
第25卷第3期北京理工大学学报Vol.25No.32005年3月TransactionsofBeijingInstituteofTechnologyMar.2005文章编号:100120645(2005)0320248204脉冲激光引信信号处理技术研究魏素娟,邓甲昊,姚秀娟(北京理工大学机电工程学院,北京100081)摘要:分析了六象限脉冲激光引信的工作原理,以直升机为目标,建立了识别直升机旋翼和机身目标信号的识别准则Z分析了对信号进行预处理的必要性及信号预处理电路的功能,用DSP硬件和软件实现了在复杂环

脉冲激光引信微弱回波信号数字检测技术研究.pdf
第28卷第4期兵工学报Vol.28No.42007年4月ACTAARMAMENTARIIApr.2007脉冲激光引信微弱回波信号数字检测技术研究桑会平,邓甲昊,胡秀娟(北京理工大学机电工程学院,北京100081)摘要:回波检测是脉冲激光引信工作的关键环节之一。其基本的数字检测方法是对微弱脉冲信号多点采样并求和后利用信号的相关性和噪声的非相关性来提高输出信噪比。在分析了多脉冲积累特点的基础上,研究了单脉冲积累方法,提出了复合积累方法。探讨了诸积累方法的优缺点,并进行了仿真,仿真结果与理论分析相吻合。最后给出

激光脉冲串测距中的信号处理的开题报告.docx
优秀毕业论文开题报告激光脉冲串测距中的信号处理的开题报告一、研究背景激光脉冲串测距技术是一种基于激光脉冲串发射和接收的技术,利用激光脉冲在空间传播的时间来测量目标物体的距离。这种技术具有高精度、高速度、长测距距离、对目标物体不受材料和颜色的影响等优点,广泛应用于地球观测、测绘、遥感、工程测量、机器人导航、军事等领域。激光脉冲串测距技术的信号处理是实现该技术的关键,主要包括信号采集、信号预处理、信号分析和信号解码等环节。其中信号预处理是信号处理的重要环节,主要是对采集到的原始信号进行滤波、去噪、增强等处理,

随钻泥浆脉冲信号检测与处理技术研究.docx
随钻泥浆脉冲信号检测与处理技术研究随钻泥浆脉冲信号检测与处理技术研究摘要:随钻技术是石油勘探开发中的一项重要手段,而随钻泥浆脉冲信号检测与处理技术是随钻技术中的一个重要环节。本文针对该技术进行了深入的研究,对信号的产生机理、检测方法和处理技术进行了详细的阐述,并分析了其在随钻过程中的应用及发展前景。关键词:随钻,泥浆,脉冲信号,检测,处理一、引言随钻技术是一种在钻井过程中进行地层测试和评价的技术手段,它综合了地震勘探、地质勘探、地球物理勘测等多个专业领域的知识和技术,具有不同于传统勘探方法的显著优势。随钻
激光脉冲串测距中的信号处理的开题报告.docx
优秀毕业论文开题报告激光脉冲串测距中的信号处理的开题报告一、研究背景激光脉冲串测距技术是一种基于激光脉冲串发射和接收的技术,利用激光脉冲在空间传播的时间来测量目标物体的距离。这种技术具有高精度、高速度、长测距距离、对目标物体不受材料和颜色的影响等优点,广泛应用于地球观测、测绘、遥感、工程测量、机器人导航、军事等领域。激光脉冲串测距技术的信号处理是实现该技术的关键,主要包括信号采集、信号预处理、信号分析和信号解码等环节。其中信号预处理是信号处理的重要环节,主要是对采集到的原始信号进行滤波、去噪、增强等处理,