
基于光学原理的三维形貌测量技术研究.pdf

as****16


1/5
2/5
3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于光学原理的三维形貌测量技术研究.pdf
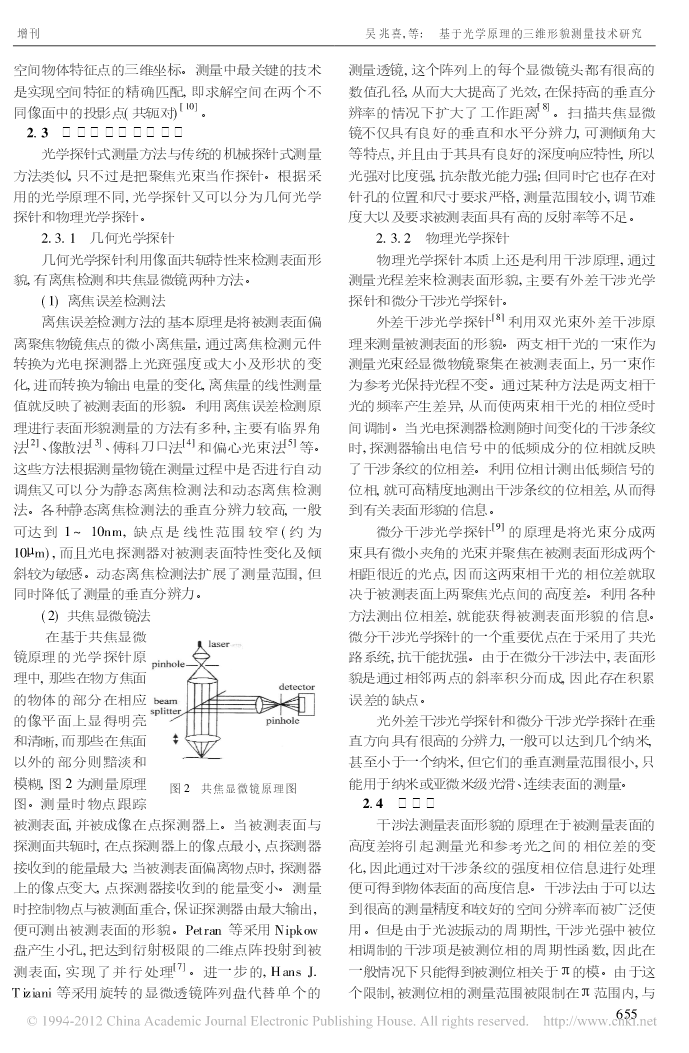
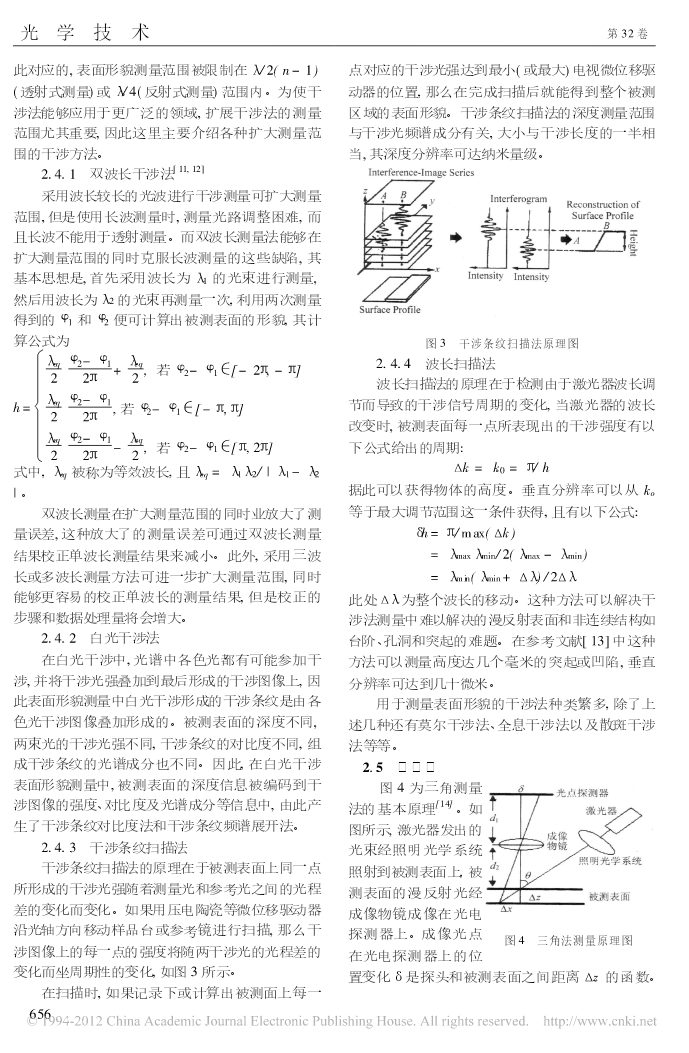
第32卷增刊光学技术Vol.32Suppl.������������������������������2006年8月OPTICALTECHNIQUEAugust�2006��文章编号:1002-1582(2006)S-0654-05基于光学原理的三维形貌测量技术研究�吴兆喜,黄元庆(厦门大学机电工程系,福建厦门�361005)摘�要:为了加快产品开发和保证产品制造质量需要对物体的三维形貌进行精确的测量。光学形貌测量技术由于其高分辨率、无破坏、数据获取速度快等优点而被认为是最有前途的三维形貌测量方法。介绍

基于光栅投影的三维形貌测量技术研究.docx
基于光栅投影的三维形貌测量技术研究基于光栅投影的三维形貌测量技术研究摘要:近年来,随着三维形貌测量的需求日益增加,基于光栅投影的三维形貌测量技术应运而生。该技术不仅具有非接触、高精度等优点,还能实现在复杂环境下的形貌测量。本文对基于光栅投影的三维形貌测量技术进行了深入研究,具体包括光栅投影原理、形貌测量方法、系统构成和应用实例等方面。研究结果表明,基于光栅投影的三维形貌测量技术在工业制造、医疗影像等领域有广泛的应用前景。关键词:光栅投影;三维形貌测量;非接触;高精度一、介绍三维形貌测量技术是现代制造业和科

基于激光测距原理的大尺寸三维形貌测量光学系统设计.docx
基于激光测距原理的大尺寸三维形貌测量光学系统设计激光测距原理是一种利用激光脉冲进行高精度测距的技术,其基本原理是将激光脉冲发送到被测目标上,然后通过测量光脉冲的回程时间计算目标到测量器之间的距离。在工程测量领域中,激光测距被广泛应用于三维形貌测量。基于激光测距原理的大尺寸三维形貌测量光学系统设计也是近年来研究热点之一。本文主要介绍该系统的设计原理与实现方法,以及其在实际应用中的优势和不足。一、系统设计原理1.光路设计该系统采用通过光纤传输的激光光源发射激光脉冲,经过特制的聚焦透镜集中到被测物体表面上,反射

基于光栅投影的三维形貌测量技术研究的开题报告.docx
基于光栅投影的三维形貌测量技术研究的开题报告一、研究背景三维形貌测量技术在工程、制造和科学等各个领域都有着广泛的应用。传统的三维形貌测量方法主要包括激光扫描、结构光和干涉测量等,这些方法各有优缺点,但是它们都无法满足在某些特定场合下的需求。因此,基于光栅投影的三维形貌测量技术成为了研究的热点之一。该技术通过在被测物体上投射光栅图案,利用图案的形变来计算物体表面的形貌信息,具有测量范围大、精度高、速度快等优点。二、研究目的本研究旨在探究基于光栅投影的三维形貌测量技术的测量原理、系统搭建、数据采集和处理方法等

基于光栅投影的三维形貌测量技术研究的中期报告.docx
基于光栅投影的三维形貌测量技术研究的中期报告一、研究背景三维形貌测量技术是近年来越来越受到关注的一个研究领域,它在工业制造、光电子、材料科学等领域有着广泛的应用。目前,常见的三维形貌测量技术包括激光三角法、相移法和光栅投影法等。其中,光栅投影法具有测量速度快、分辨率高、测量范围广等优点,已经成为了三维形貌测量技术中的一种重要手段。二、研究内容本研究主要针对基于光栅投影的三维形貌测量技术,在前期研究的基础上,进行了以下方面的研究:1.光栅投影系统的搭建:搭建了基于光栅投影的三维形貌测量系统,并对系统中的各个