
第3章 遥感传感器及其成像原理3.1.doc

kp****93


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

第3章 遥感传感器及其成像原理3.1.doc
第3章遥感传感器及其成像原理§3.1扫描成像类传感器遥感传感器是获取遥感数据的关键设备,由于设计和获取数据的特点不同,传感器的种类也就繁多,就其基本结构原理来看,目前遥感中使用的传感器大体上可分为如下一些类型:(1)摄影类型的传感器;(2)扫描成像类型的传感器;(3)雷达成像类型的传感器;(4)非图像类型的传感器。无论哪种类型遥感传感器,它们都由如图3-1所示的基本部分组成:图3-1遥感传感器的一般结构1、收集器:收集地物辐射来的能量。具体的元件如透镜组、反射镜组、天线等。2、探测器:将收集的辐射能转变成

绪论传感器与遥感成像原理.pptx
1.传感器结构2.摄影成像(Ⅰ)框幅式摄影成像(Ⅱ)缝隙式摄影成像(Ⅲ)全景式摄影成像(Ⅳ)多光谱摄影成像3.扫描成像(Ⅰ)光机扫描成像(Ⅱ)推帚式扫描成像4.雷达成像(Ⅰ)SAR(Ⅱ)LIDAR1.传感器结构传感器组成传感器分类成像传感器摄影类型传感器:框幅式、缝隙式、全景式、多光谱扫描成像类型的传感器:光机扫描、推扫式扫描雷达成像类型的传感器72.摄影成像之(Ⅰ)框幅式摄影成像ComparisonoftheOpticalComponentsoftheSimpleCamerawiththoseofthe

遥感卫星传感器及其成像方式.ppt
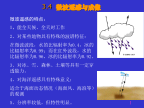
第三章传感器及其成像方式第一节传感器的分类第一节传感器概述第一节传感器的分类第二节传感器的组成第二节传感器的组成第二节传感器的组成第二节传感器的组成第二节传感器的组成摄影方式--感光胶片被景物电磁能激活而产生景物的潜影(指肉眼看不到但客观又存在的潜伏影像)扫描方式--探测器对场景进行扫描,逐点(行、面)以数字形式在磁带上记录景物模拟信号,这种记录是一种经电光转换而能形成直观影像的潜影。⑴.感光材料:凡经曝光后发生光化学作用,经过一定的化学或物理方法处理后,能够形成固定影像的各种材料的总称。摄影过程中记录光
遥感成像原理-未讲完部分.pptx
遥感成像原理摄影成像摄影成像扫描成像光/机扫描成像光/机扫描成像光/机扫描成像固体自扫描成像固体自扫描成像高光谱成像光谱扫描高光谱成像光谱扫描微波遥感与成像微波遥感与成像微波遥感方式与传感器内容总结
微波遥感与成像侧视雷达工作原理.ppt
1234567891011121314151617181920212223242526272829303132333435