
伺服马达维修.pdf

qw****27

1/10
2/10
3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

伺服马达维修.doc
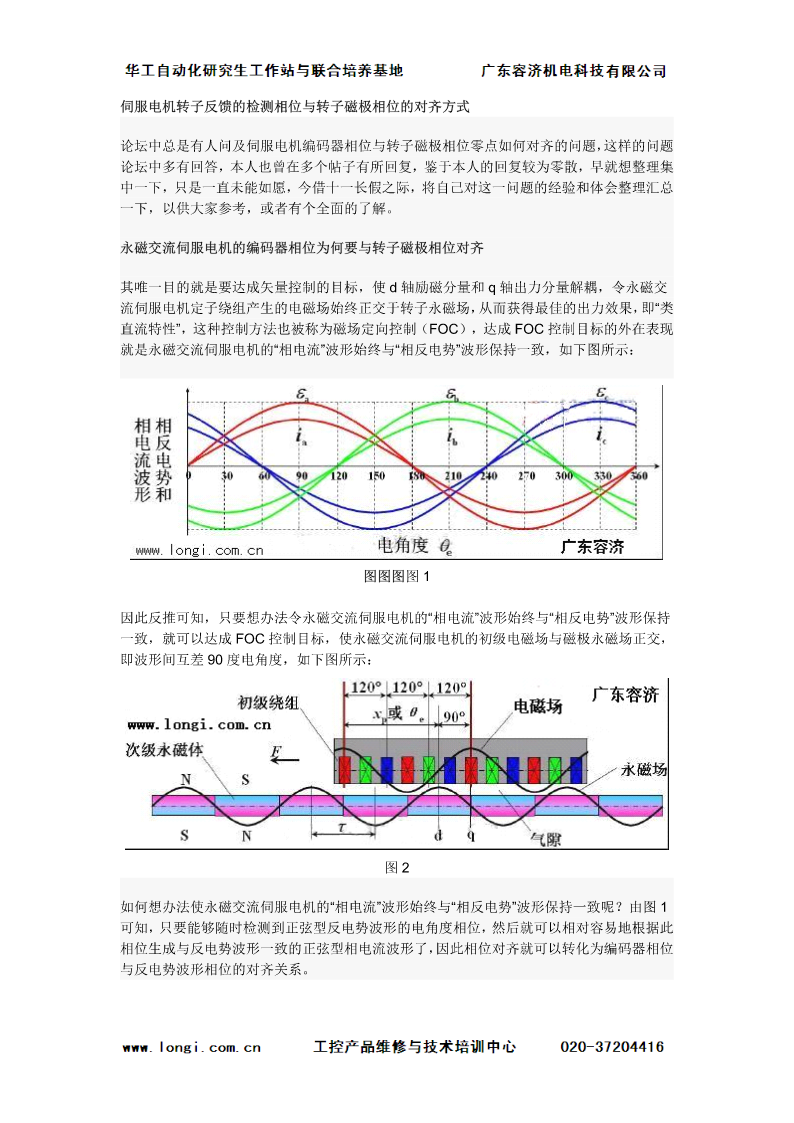
伺服电机转子反馈的检测相位与转子磁极相位的对齐方式论坛中总是有人问及伺服电机编码器相位与转子磁极相位零点如何对齐的问题,这样的问题论坛中多有回答,本人也曾在多个帖子有所回复,鉴于本人的回复较为零散,早就想整理集中一下,只是一直未能如愿,今借十一长假之际,将自己对这一问题的经验和体会整理汇总一下,以供大家参考,或者有个全面的了解。永磁交流伺服电机的编码器相位为何要与转子磁极相位对齐其唯一目的就是要达成矢量控制的目标,使d轴励磁分量和q轴出力分量解耦,令永磁交流伺服电机定子绕组产生的电磁场始终正交于转子永磁场

伺服马达维修.pdf
伺服电机转子反馈的检测相位与转子磁极相位的对齐方式论坛中总是,这样的有人问题问及伺服电机编码器相位与转子磁极相位零点如何对齐的问题论,本坛中人也,鉴多有于本,早曾在就想回答人的多个整理回复帖子集较为有所零散回复中,只一下,今是一,将借十自己直未一长对这能如假之一问愿际题的经验和体会整理汇总一下,以供大家参考,或者有个全面的了解。永磁交流伺服电机的编码器相位为何要与转子磁极相位对齐其唯一d轴q轴励磁目的出力分量就是分量和要达解耦成矢,令量控永磁制的交目标,使流伺服,从电机而获,即“类定子得最绕组佳的产生出力

伺服电机(马达)维修技术.pdf
www.plcworld.cn������������ººº����º�����º�����������������������������������������������������������������������º�������º����º����º����ºº度容����������º�������������������������������������������������������º�������������������������������������������������

伺服马达&步进马达.ppt
Servomotor&StepmotorStepmotorStepmotorServomotorServomotorStepmotor&servomotorStepmotor&servomotorACmotor&DCmotorTHANKS

伺服马达安装底座、使用伺服马达的设备.pdf
本发明提供一种伺服马达安装底座及使用伺服马达的设备。本发明的伺服马达安装底座,用于将伺服马达连接并固定在机台硬体上,包括相对设置的上安装板与下安装板、以及用于将所述上安装板与下安装板连接在一起并调整所述上安装板和下安装板之间间隙、角度的多组调整螺丝组;使用时,所述上安装板、下安装板分别固定在所述机台硬体和伺服马达上,通过调节所述调整螺丝组来调节所述上安装板和下安装板之间的间隙、角度,进而调整伺服马达的安装角度,能够有效解决现有伺服马达安装角度无法调整而导致伺服马达容易偏移的问题发生,从而避免齿轮或联轴器磨