
伺服电机维修.pdf

qw****27

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
伺服电机维修.pdf
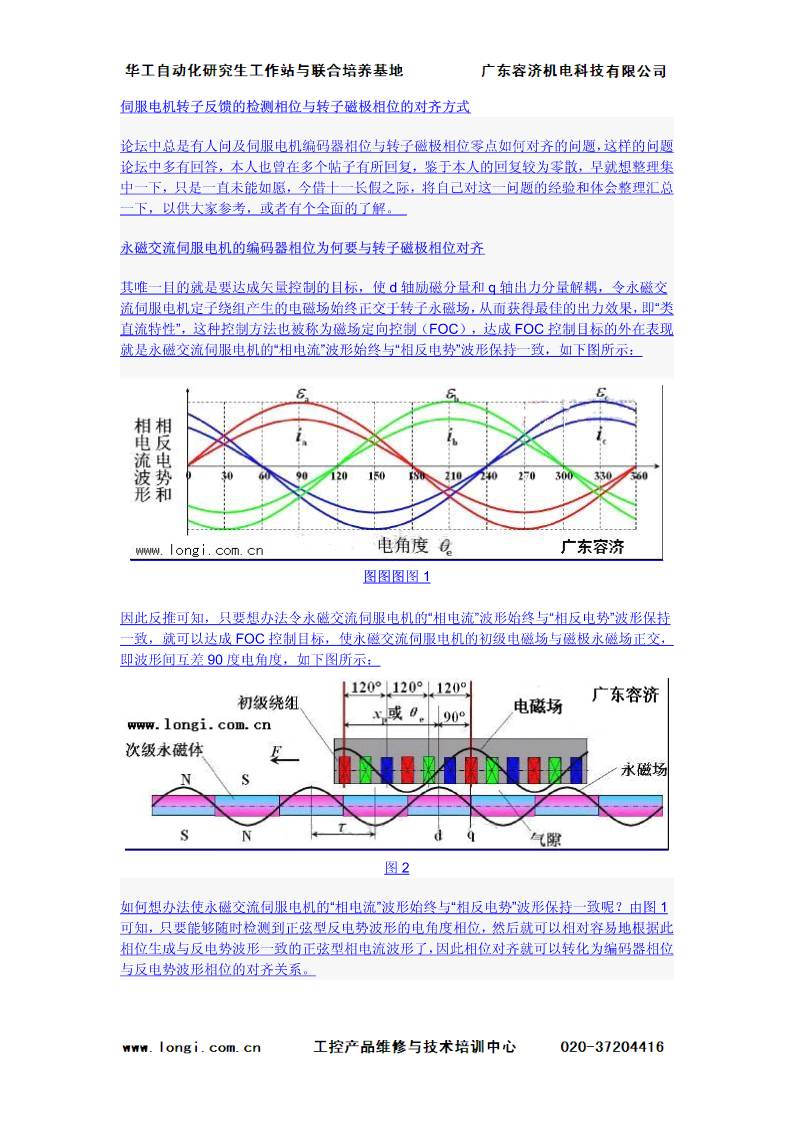
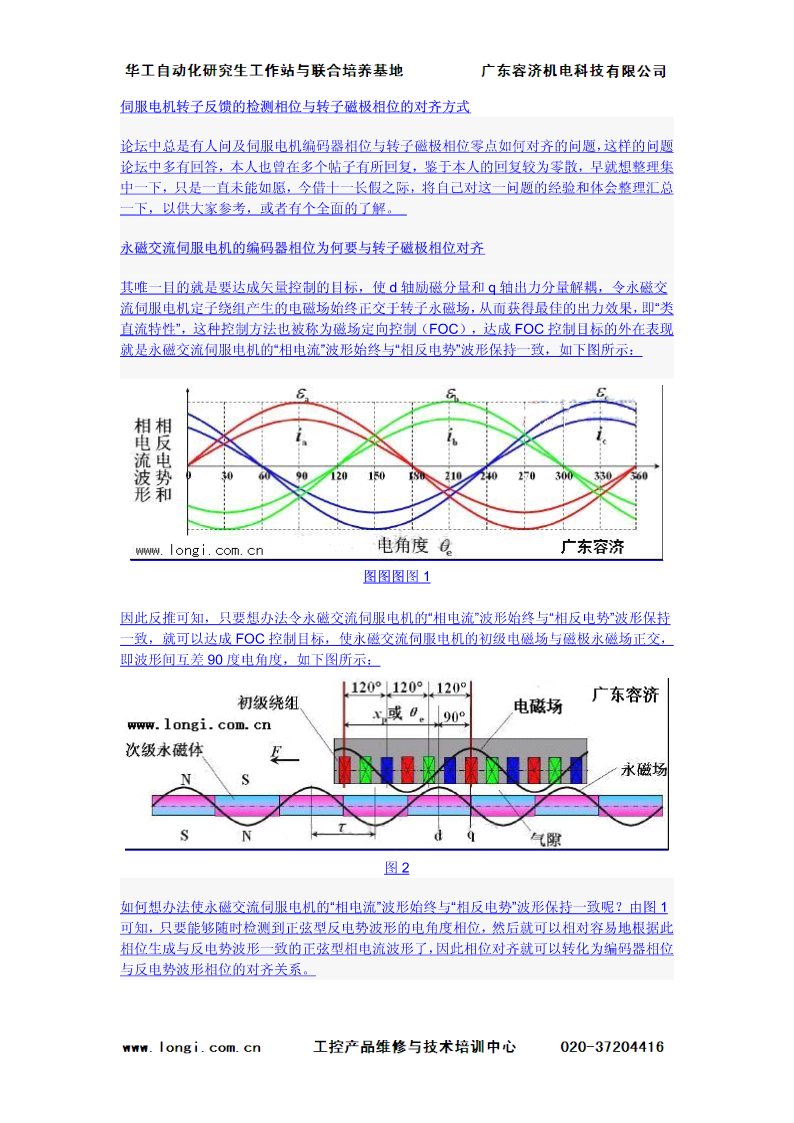
伺服电机转子反馈的检测相位与转子磁极相位的对齐方式论坛中总是,这样的有人问题问及伺服电机编码器相位与转子磁极相位零点如何对齐的问题论,本坛中人也,鉴多有于本,早曾在就想回答人的多个整理回复帖子集较为有所零散回复中,只一下,今是一,将借十自己直未一长对这能如假之一问愿际题的经验和体会整理汇总一下,以供大家参考,或者有个全面的了解。永磁交流伺服电机的编码器相位为何要与转子磁极相位对齐其唯一d轴q轴励磁目的出力分量就是分量和要达解耦成矢,令量控永磁制的交目标,使流伺服,从电机而获,即“类定子得最绕组佳的产生出力

伺服电机维修资料-.doc
东莞莞深机电技术专业伺服电机修理,编码器修理,三洋伺服电机修理广东省真真正正的伺服电机修理服务商,一流技术,值的选择!TEL:专业修理以下各类型伺服电机交直流伺服电机修理、编码器修理,步进伺服电机修理、主轴伺服电机修理、电主轴修理、直线电机修理、、多极旋转电机修理、测速电机修理、高速电机修理伺服电机广泛应用于贴片机、数控机床、自动包装机、饮料食品机、印刷机、PCB钻孔机、服装纺织机、光盘生产线、工业机器人、雕刻机等自动化工控设备。三洋伺服电机马达修理型号65BM030HXE0065BM003HXE0065

伺服电机(马达)维修技术.pdf
www.plcworld.cn������������ººº����º�����º�����������������������������������������������������������������������º�������º����º����º����ºº度容����������º�������������������������������������������������������º�������������������������������������������������

伺服电机常见故障与维修.docx
伺服电机常见故障与维修第一。电机上电,机械振荡(加/减速时)引发此类故障的常见原因有:①脉冲编码器出现故障。此时应检查伺服系统是否稳定,电路板维修检测电流是否稳定,同时,速度检测单元反馈线端子上的电压是否在某几点电压下降,如有下降表明脉冲编码器不良,更换编码器;②脉冲编码器十字联轴节可能损坏,导致轴转速与检测到的速度不同步,更换联轴节;③测速发电机出现故障。修复,更换测速机。维修实践中,测速机电刷磨损、卡阻故障较多,此时应拆下测速机的电刷,用纲砂纸打磨几下,同时清扫换向器的污垢,再重新装好。第二.电机上电

安川伺服电机维修资料-.doc
东莞莞深机电技术专业伺服电机修理/编码器修理/三洋伺服电机修理广东省真真正正的伺服电机修理服务商,一流技术,值的选择!安川全系列伺服电机修理】专业伺服电机修理伺服马达修理直流电机修理交流马达修理直线电机修理减速电机修理印制绕组伺服电机修理空心杯伺服马达修理步进电机修理光电编码器修理旋转变压器编码器修理电机修理机构马达修理中心SG-44A6B-TK124.4KWSGDB-09A2AB850WSGM-02A3SN11200WSGM-02AWG36B200WSGM-02AWSU12200WSGM-02B314S