
标定评价参数获取方法和装置、存储介质及电子设备.pdf

玉军****la


1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

标定评价参数获取方法和装置、存储介质及电子设备.pdf
本发明公开了一种标定评价参数获取方法和装置、存储介质及电子设备。其中,该方法包括:获取目标车辆在当前场景中确定出的当前场景点云数据,其中,当前场景点云数据中包括至少两个标定坐标体系下对目标车辆标定的定位结果;对当前场景点云数据进行分割,以得到多个栅格点云数据;根据多个栅格点云数据中每个栅格点云数据各自对应的几何特征,从多个栅格点云数据中确定出目标栅格点云数据,其中,目标栅格点云数据的几何特征指示栅格区域中包括参考面;对目标栅格点云数据的几何特征进行统计,以生成当前场景点云数据匹配的标定评价参数。本发明解决

实验参数获取方法、装置、电子设备及存储介质.pdf
本申请提供了一种实验参数获取方法、装置、电子设备及计算机可读存储介质;所述方法应用于实验设备,包括:获取实验试件的标识;如果所述实验设备与服务器之间的通信处于断开连接的状态,访问区块链网络,根据所述实验试件的标识,从所述区块链网络中获取所述实验试件的试件参数;其中,所述区块链网络包括多个区块链节点,所述服务器为所述多个区块链节点中的一个节点,所述试件参数用于所述实验设备进行实验。通过本申请,能够离线获得试件参数,保障了网络或服务器出现异常情况下试验的正常进行。
生理参数获取方法、装置、电子设备及存储介质.pdf
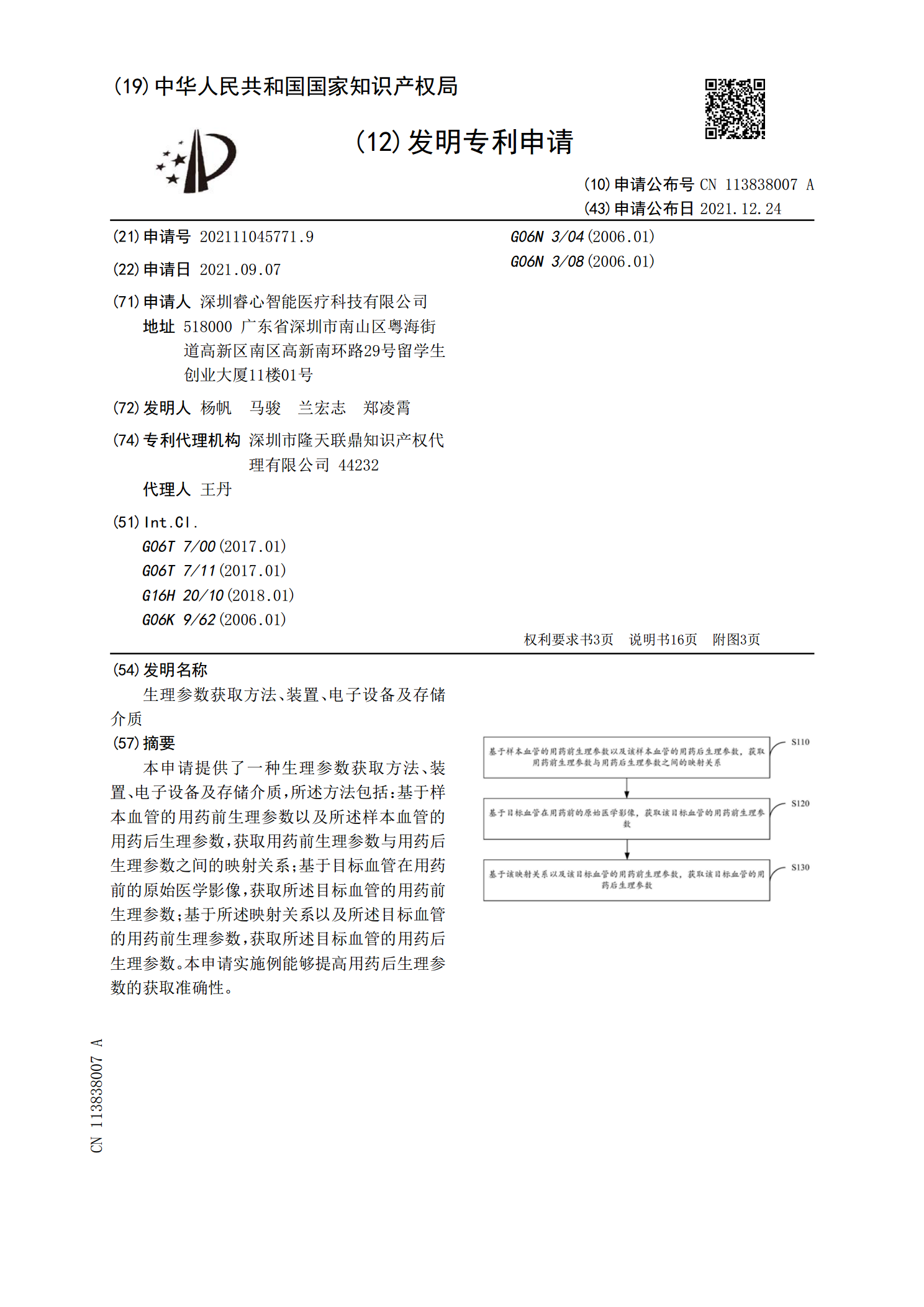
本申请提供了一种生理参数获取方法、装置、电子设备及存储介质,所述方法包括:基于样本血管的用药前生理参数以及所述样本血管的用药后生理参数,获取用药前生理参数与用药后生理参数之间的映射关系;基于目标血管在用药前的原始医学影像,获取所述目标血管的用药前生理参数;基于所述映射关系以及所述目标血管的用药前生理参数,获取所述目标血管的用药后生理参数。本申请实施例能够提高用药后生理参数的获取准确性。
车辆控制参数的标定方法、装置、电子设备及存储介质.pdf
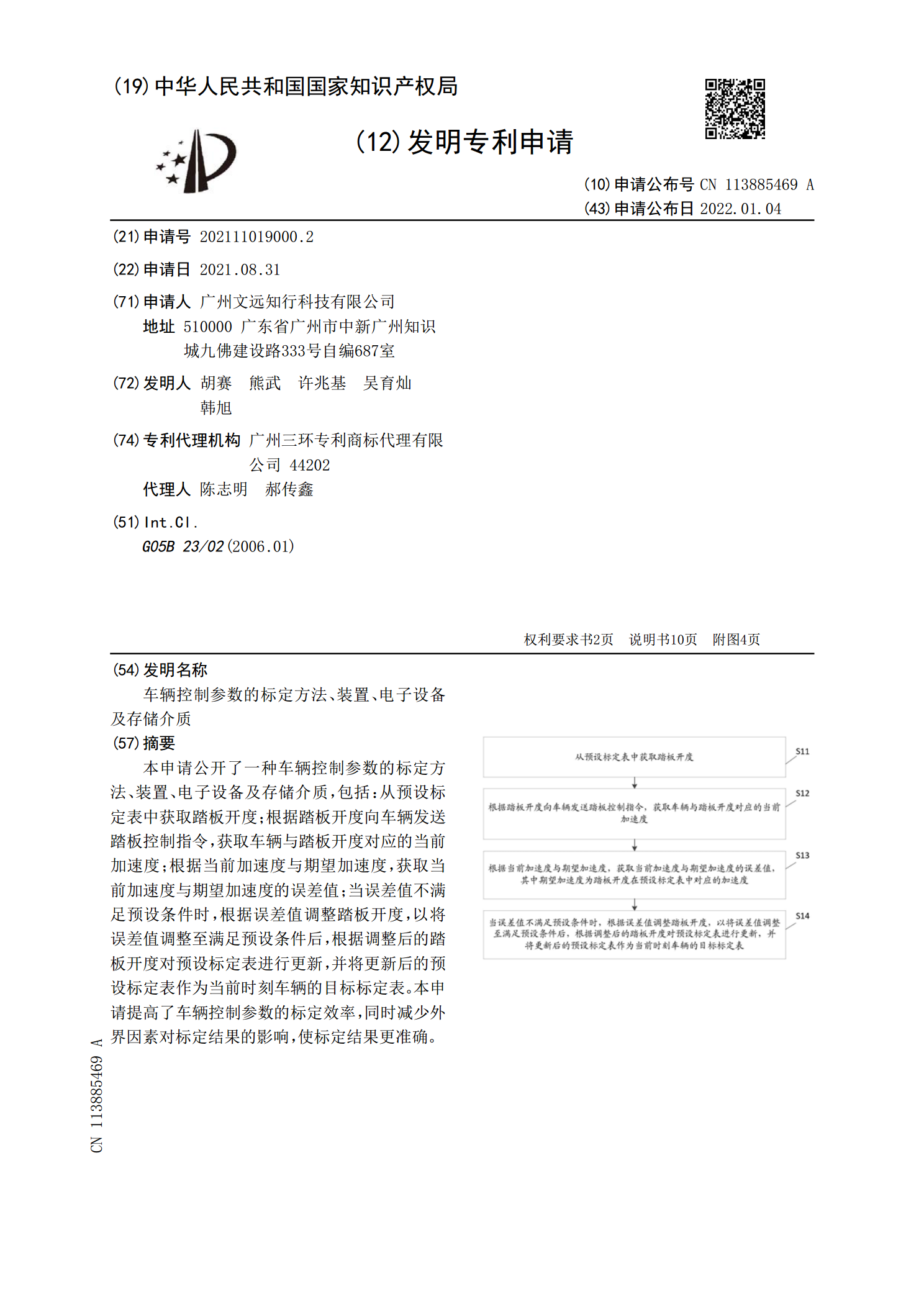
本申请公开了一种车辆控制参数的标定方法、装置、电子设备及存储介质,包括:从预设标定表中获取踏板开度;根据踏板开度向车辆发送踏板控制指令,获取车辆与踏板开度对应的当前加速度;根据当前加速度与期望加速度,获取当前加速度与期望加速度的误差值;当误差值不满足预设条件时,根据误差值调整踏板开度,以将误差值调整至满足预设条件后,根据调整后的踏板开度对预设标定表进行更新,并将更新后的预设标定表作为当前时刻车辆的目标标定表。本申请提高了车辆控制参数的标定效率,同时减少外界因素对标定结果的影响,使标定结果更准确。
标定方法及装置、电子设备和存储介质.pdf
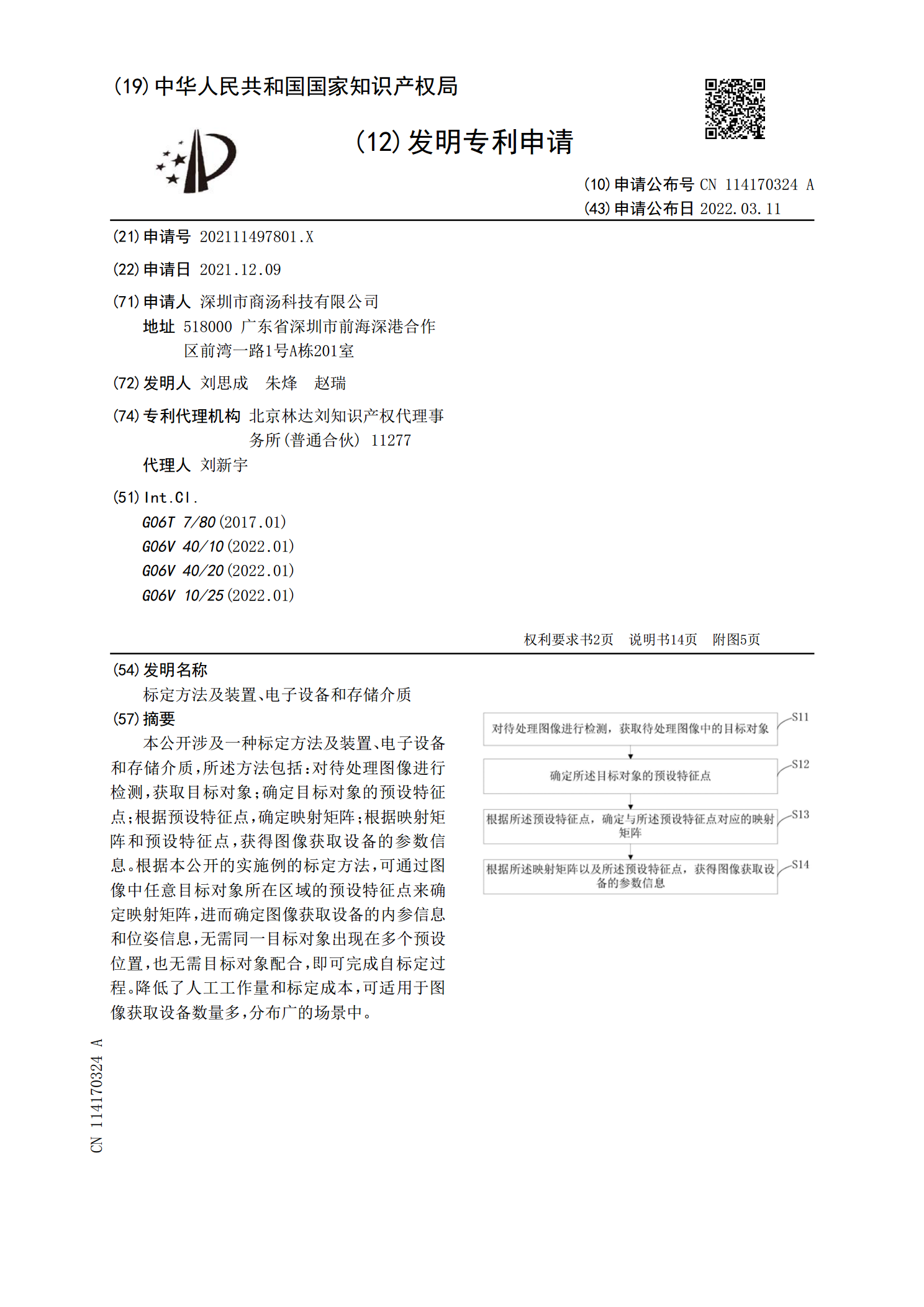
本公开涉及一种标定方法及装置、电子设备和存储介质,所述方法包括:对待处理图像进行检测,获取目标对象;确定目标对象的预设特征点;根据预设特征点,确定映射矩阵;根据映射矩阵和预设特征点,获得图像获取设备的参数信息。根据本公开的实施例的标定方法,可通过图像中任意目标对象所在区域的预设特征点来确定映射矩阵,进而确定图像获取设备的内参信息和位姿信息,无需同一目标对象出现在多个预设位置,也无需目标对象配合,即可完成自标定过程。降低了人工工作量和标定成本,可适用于图像获取设备数量多,分布广的场景中。