
一种无人艇跟踪控制方法及系统.pdf

听容****55


1/10

2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人艇跟踪控制方法及系统.pdf
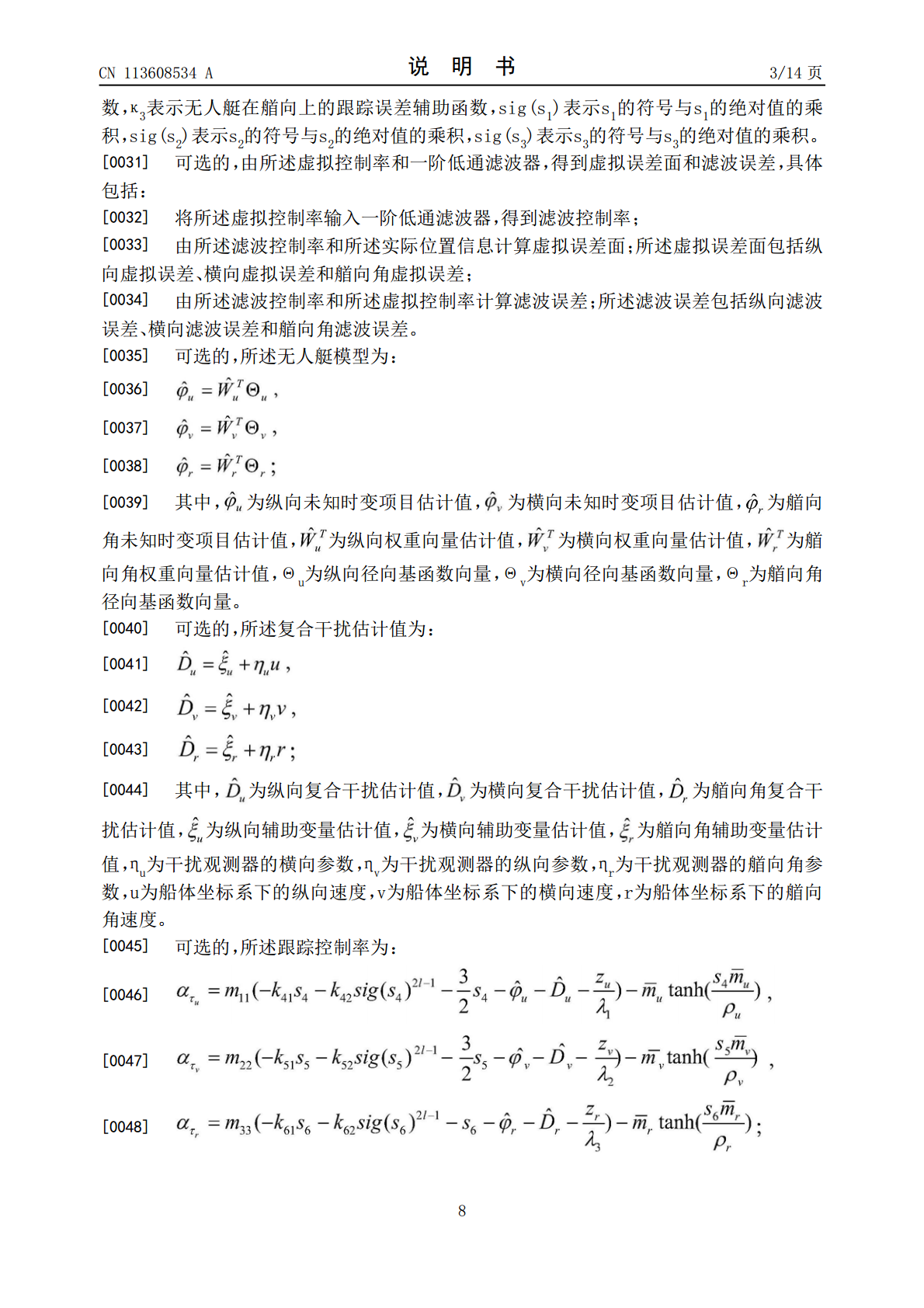
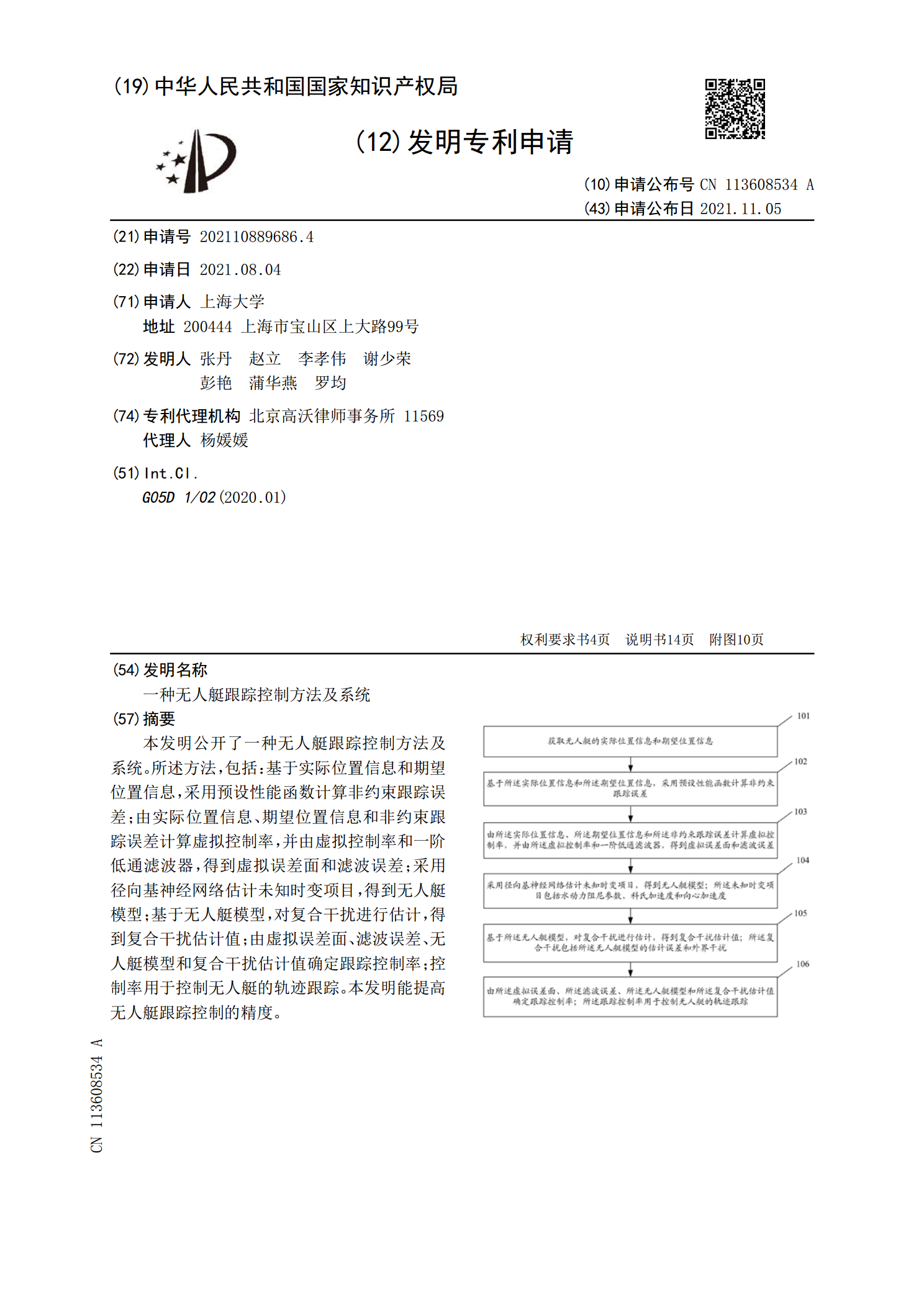
本发明公开了一种无人艇跟踪控制方法及系统。所述方法,包括:基于实际位置信息和期望位置信息,采用预设性能函数计算非约束跟踪误差;由实际位置信息、期望位置信息和非约束跟踪误差计算虚拟控制率,并由虚拟控制率和一阶低通滤波器,得到虚拟误差面和滤波误差;采用径向基神经网络估计未知时变项目,得到无人艇模型;基于无人艇模型,对复合干扰进行估计,得到复合干扰估计值;由虚拟误差面、滤波误差、无人艇模型和复合干扰估计值确定跟踪控制率;控制率用于控制无人艇的轨迹跟踪。本发明能提高无人艇跟踪控制的精度。
一种无人艇航迹跟踪系统及方法.pdf
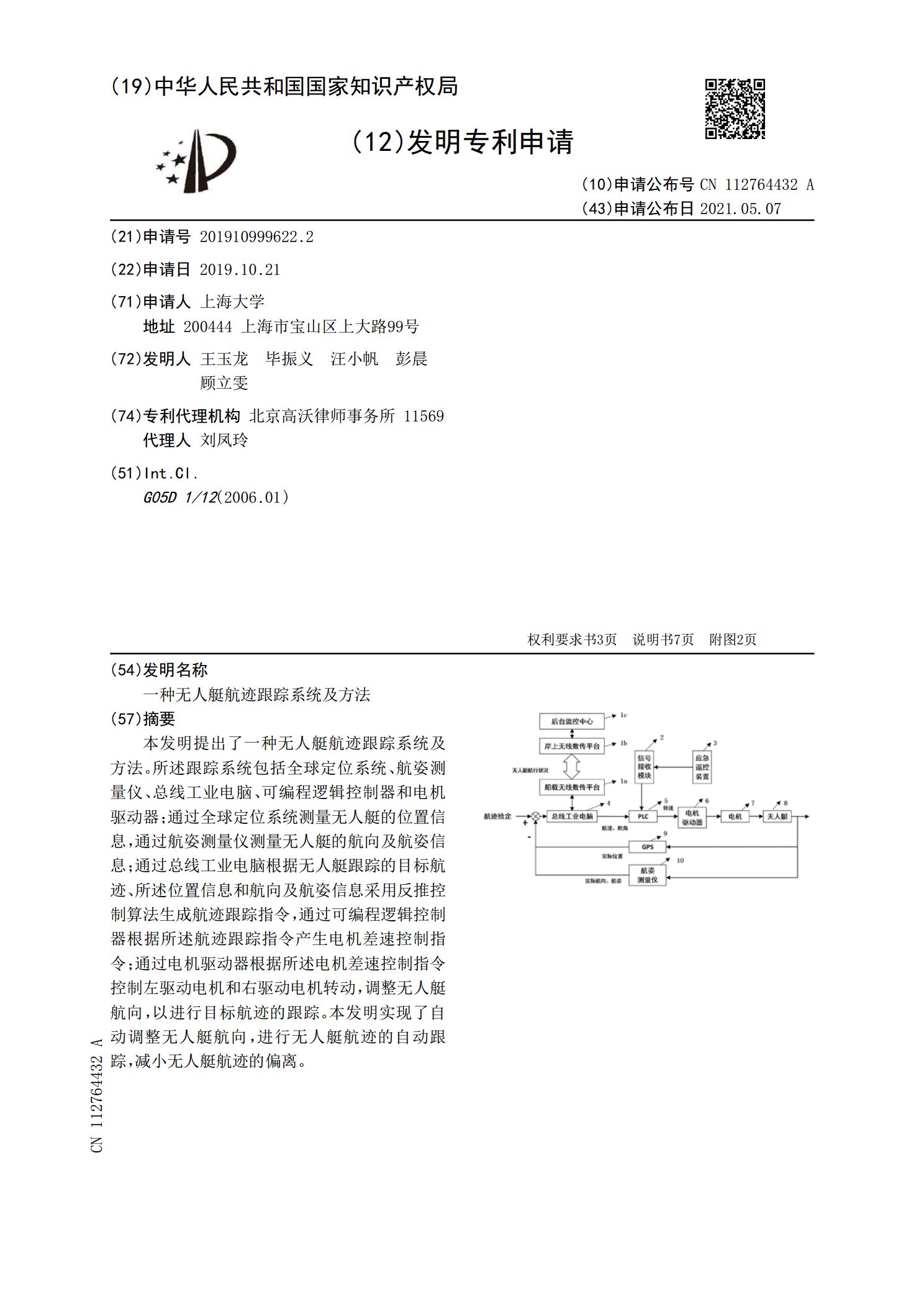
本发明提出了一种无人艇航迹跟踪系统及方法。所述跟踪系统包括全球定位系统、航姿测量仪、总线工业电脑、可编程逻辑控制器和电机驱动器;通过全球定位系统测量无人艇的位置信息,通过航姿测量仪测量无人艇的航向及航姿信息;通过总线工业电脑根据无人艇跟踪的目标航迹、所述位置信息和航向及航姿信息采用反推控制算法生成航迹跟踪指令,通过可编程逻辑控制器根据所述航迹跟踪指令产生电机差速控制指令;通过电机驱动器根据所述电机差速控制指令控制左驱动电机和右驱动电机转动,调整无人艇航向,以进行目标航迹的跟踪。本发明实现了自动调整无人艇航

无人艇轨迹跟踪控制方法研究.docx
无人艇轨迹跟踪控制方法研究无人艇轨迹跟踪控制方法研究摘要:无人艇轨迹跟踪控制是无人艇技术中的重要问题之一。本文对无人艇轨迹跟踪控制方法进行了系统的研究与探讨。首先,总结了目前常用的无人艇轨迹跟踪控制方法,包括传统PID控制、模型预测控制和自适应控制等。接着,对各种方法的优缺点进行了分析,并提出了一种融合模型预测控制和自适应控制的新的轨迹跟踪控制方法。最后,通过仿真实验验证了新方法的有效性。关键词:无人艇,轨迹跟踪控制,PID控制,模型预测控制,自适应控制1.引言随着无人艇技术的快速发展,无人艇的应用越来越
一种基于比例导引的无人艇目标跟踪方法及系统.pdf
本发明涉及一种基于比例导引的无人艇目标跟踪方法及系统,该方法包括:求解目标导引点的坐标;求解目标艇与目标导引点的连线和无人艇与目标导引点的连线之间的夹角;求解无人机期望航速与航向。本发明的技术方案,采用比例导引法实现了无人艇在依靠光学等探测方式时对目标的稳定跟踪,大大提高了无人艇在高机动性及运动的条件下的探测性能。

一种无人艇的控制方法及系统.pdf
本发明提供了一种无人艇的控制方法及系统,无人艇包含由电磁铰接装置铰接在一起的内燃机推进艇身和纯电推进艇身,该方法为:基于预设的航行计划确定无人艇在当前航段的目标航速;控制内燃机推进艇身的内燃机以与目标航速对应的预设转速运行,并确定无人艇的偏航角速率、实际位置和实际航向;根据航行计划、实际位置、实际航向和偏航角速率,确定得到螺旋桨转速调整值;基于螺旋桨转速调整值调整纯电推进艇身的螺旋桨的转速,以控制无人艇的航向,从而加强无人艇的航行能力以保证采集到台风的相关数据。