
基于卫星三维成像的主动漂移多目标优化方法和系统.pdf

代瑶****zy

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于卫星三维成像的主动漂移多目标优化方法和系统.pdf
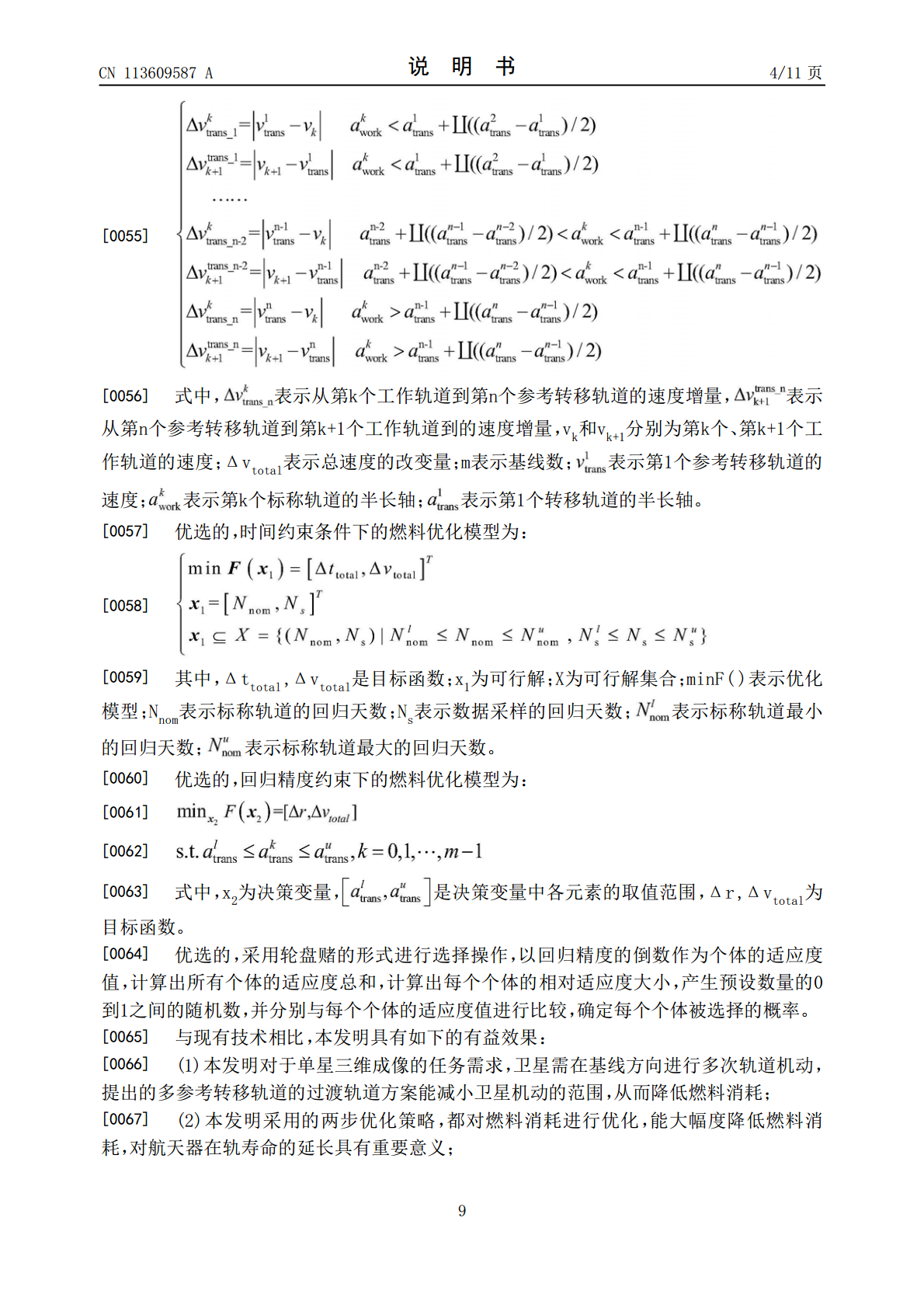
本发明提供了一种基于卫星三维成像的主动漂移多目标优化方法和系统,包括:首先分析卫星系统三维成像原理;其次通过分析卫星轨道的动力学特性,建立标称轨道、多参考转移轨道的回归模型,并建立燃料、时间和回归精度的优化模型;最后以燃料最优为优化主线,进行分步逐层优化。第一步,应用帕累托最优解的思想,求解满足时间约束的燃料最优初值计算问题。第二步,以第一步的初值为基础,通过改进的自适应混合交叉遗传算法在满足回归精度要求的情况下,进一步优化燃料消耗。本发明解决了时间和回归精度约束下卫星三维成像主动漂移的燃料最优的轨道设计
基于主动成像卫星的变成像时长规划方法及系统.pdf
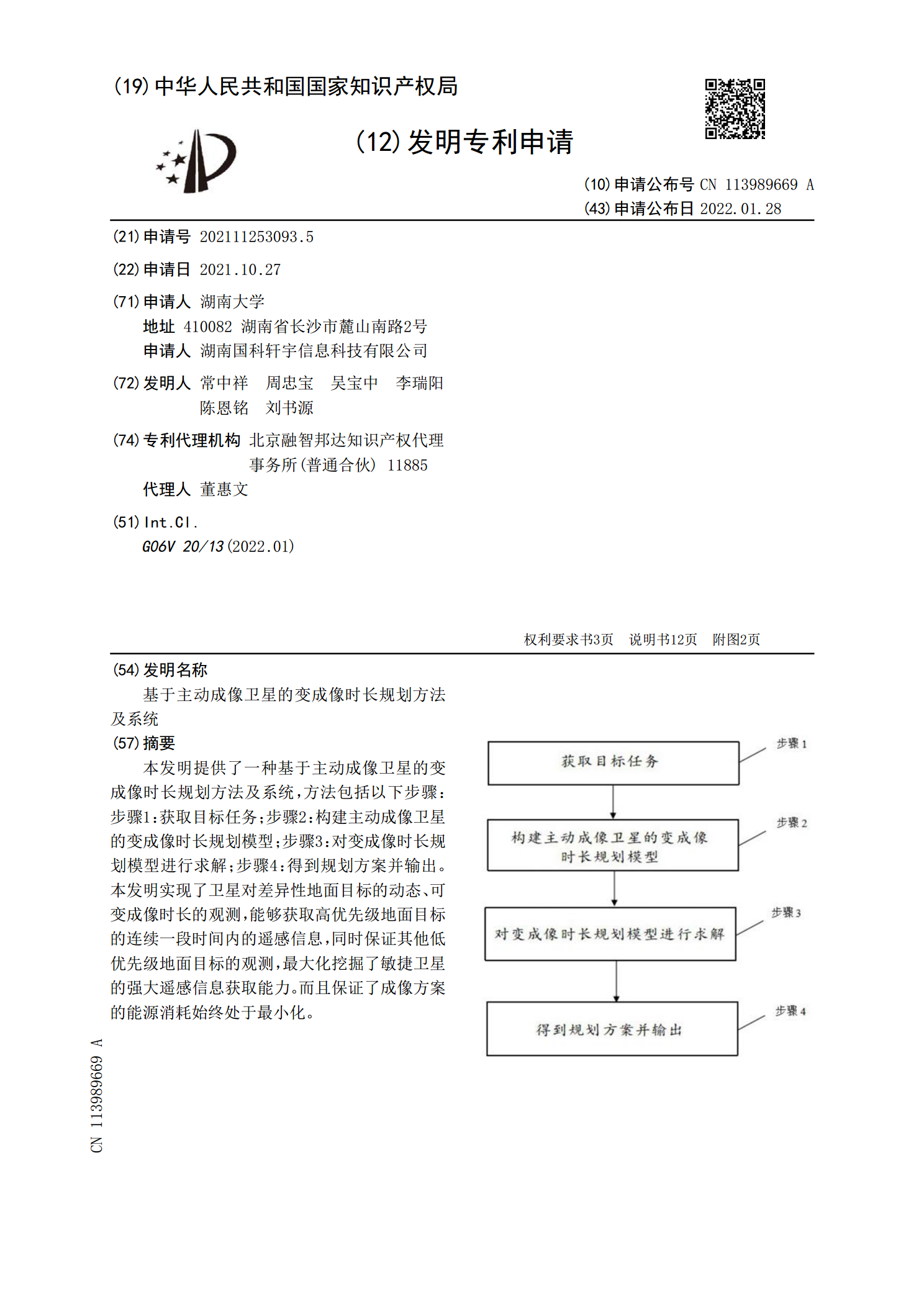
本发明提供了一种基于主动成像卫星的变成像时长规划方法及系统,方法包括以下步骤:步骤1:获取目标任务;步骤2:构建主动成像卫星的变成像时长规划模型;步骤3:对变成像时长规划模型进行求解;步骤4:得到规划方案并输出。本发明实现了卫星对差异性地面目标的动态、可变成像时长的观测,能够获取高优先级地面目标的连续一段时间内的遥感信息,同时保证其他低优先级地面目标的观测,最大化挖掘了敏捷卫星的强大遥感信息获取能力。而且保证了成像方案的能源消耗始终处于最小化。

基于合成策略的成像卫星应急任务规划方法和系统.pdf
本发明提供了一种基于合成策略的成像卫星应急任务规划方法和系统,涉及成像卫星任务规划技术领域。本发明能够在规划方案中寻找应急任务的冲突,在满足合成约束情况下,将选取的应急任务与规划方案中冲突进行任务合成,减少成像卫星进行任务成像时的机动和开机次数,以及成像结束时的关机次数,提高应急任务完成机会,进而提高应急任务规划的效果,当不存在满足合成约束条件时,执行应急任务插入策略,能够在应急任务存在较多冲突时,将选取的应急任务插入到所述可见时间窗的无冲突位置,通过合成观测减少成像卫星成像时间,提高成像卫星资源利用效率

基于滚动优化策略的成像侦察卫星应急调度方法.docx
基于滚动优化策略的成像侦察卫星应急调度方法随着现代技术的不断发展和运用,成像侦察卫星作为一种高精度的图像采集手段,得到了越来越广泛的应用。然而,成像侦察卫星在执行任务时可能会遇到各种应急情况,例如天气突变、机械故障等,需要进行紧急调度以确保任务顺利完成。因此,对于成像侦察卫星的应急调度方法进行研究和优化具有重要意义。一般来说,成像侦察卫星的调度问题可以归结为资源分配和任务优化问题。针对应急调度场景,我们需要优化的重点就是调度的效率和迅速性。在这种情况下,滚动优化策略就成为一种较为常见的选择。滚动优化策略是
火箭起飞实时漂移量主动测量方法和系统.pdf
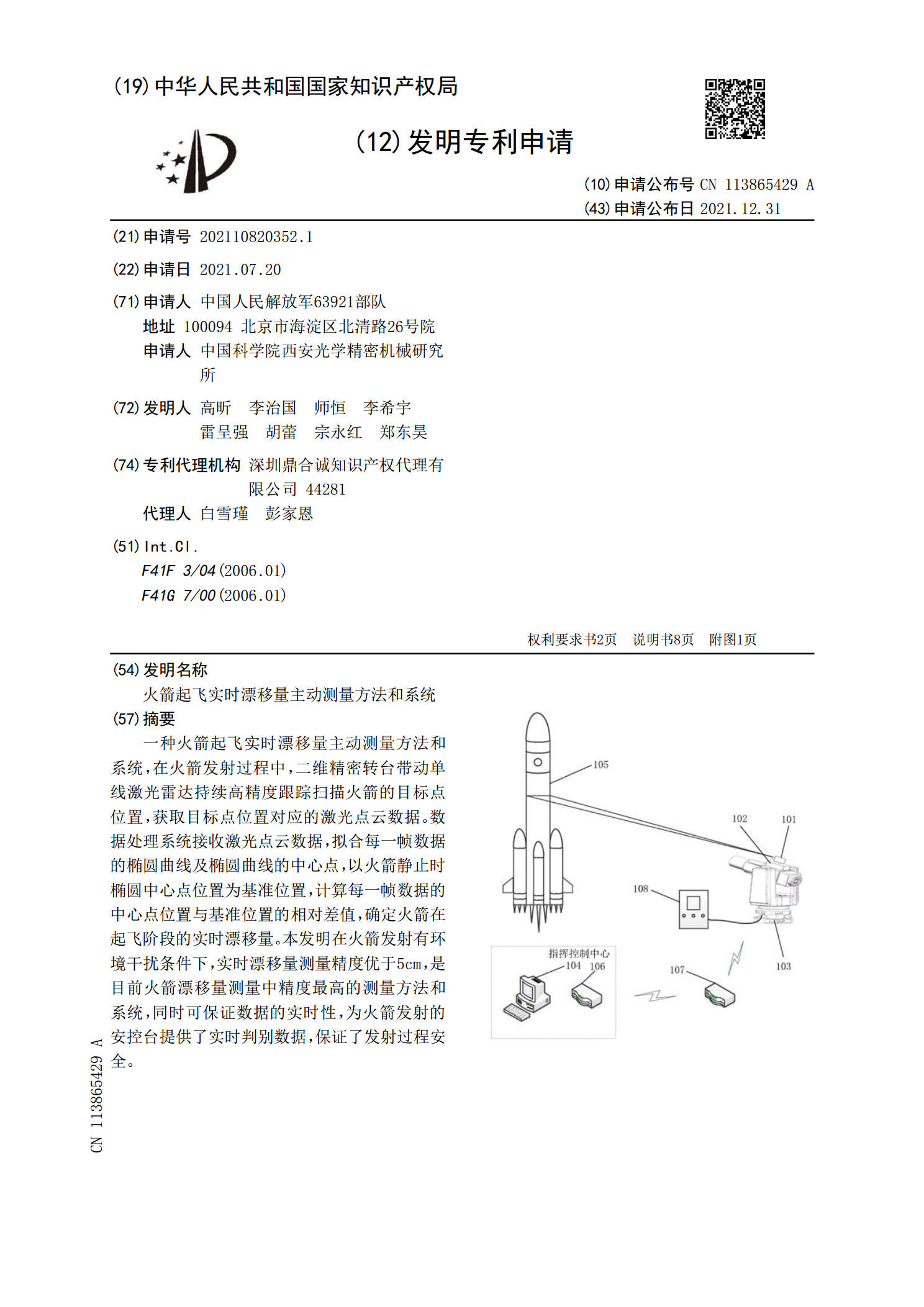
一种火箭起飞实时漂移量主动测量方法和系统,在火箭发射过程中,二维精密转台带动单线激光雷达持续高精度跟踪扫描火箭的目标点位置,获取目标点位置对应的激光点云数据。数据处理系统接收激光点云数据,拟合每一帧数据的椭圆曲线及椭圆曲线的中心点,以火箭静止时椭圆中心点位置为基准位置,计算每一帧数据的中心点位置与基准位置的相对差值,确定火箭在起飞阶段的实时漂移量。本发明在火箭发射有环境干扰条件下,实时漂移量测量精度优于5cm,是目前火箭漂移量测量中精度最高的测量方法和系统,同时可保证数据的实时性,为火箭发射的安控台提供了