
大天线缩比平台传动系统齿隙误差校准机构及校准方法.pdf

宛菡****魔王

1/9
2/9
3/9
4/9
5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
大天线缩比平台传动系统齿隙误差校准机构及校准方法.pdf
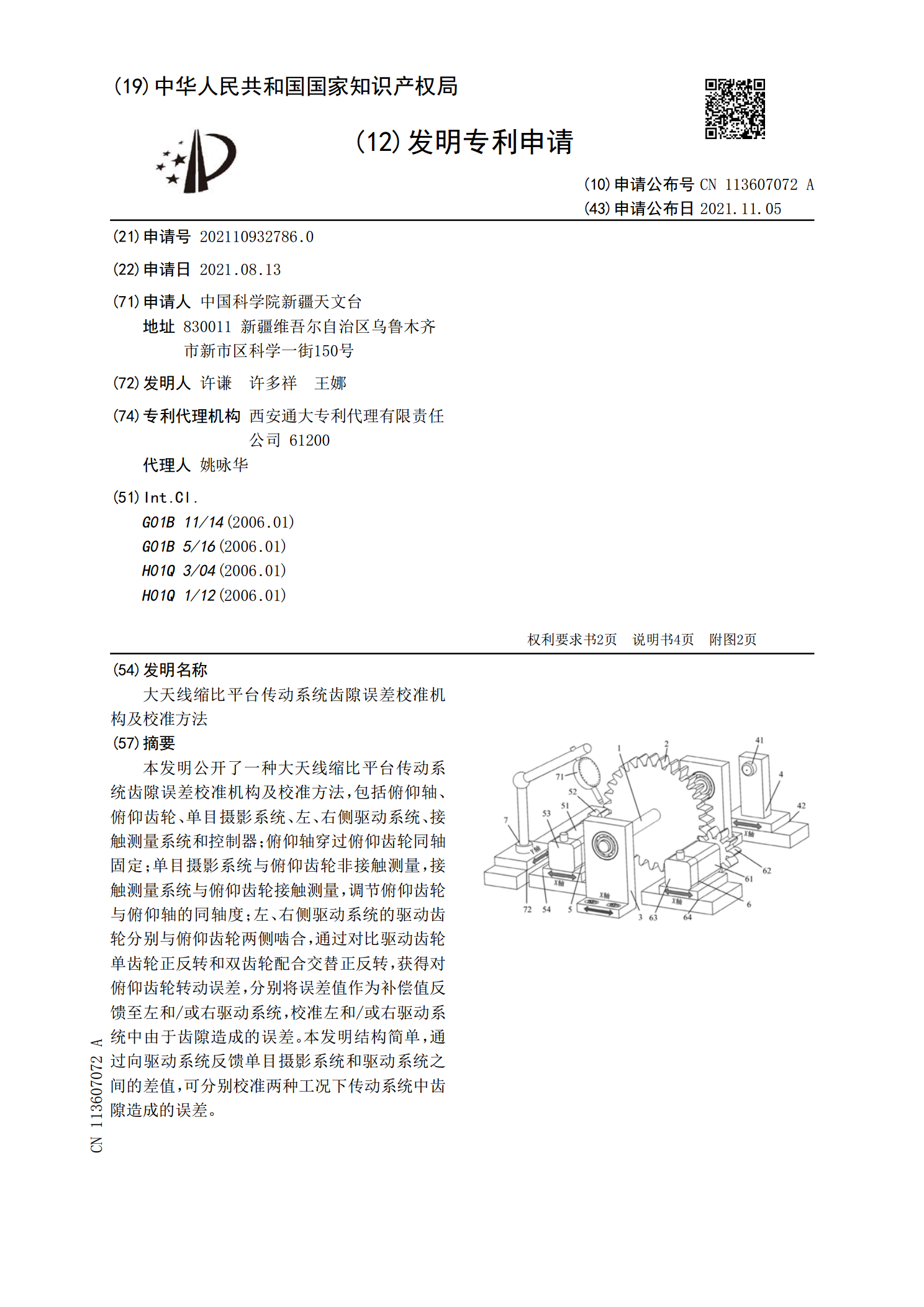
本发明公开了一种大天线缩比平台传动系统齿隙误差校准机构及校准方法,包括俯仰轴、俯仰齿轮、单目摄影系统、左、右侧驱动系统、接触测量系统和控制器;俯仰轴穿过俯仰齿轮同轴固定;单目摄影系统与俯仰齿轮非接触测量,接触测量系统与俯仰齿轮接触测量,调节俯仰齿轮与俯仰轴的同轴度;左、右侧驱动系统的驱动齿轮分别与俯仰齿轮两侧啮合,通过对比驱动齿轮单齿轮正反转和双齿轮配合交替正反转,获得对俯仰齿轮转动误差,分别将误差值作为补偿值反馈至左和/或右驱动系统,校准左和/或右驱动系统中由于齿隙造成的误差。本发明结构简单,通过向驱动

天线校准设备以及用于校准天线的方法.pdf
一种天线校准设备,包括手持外壳,所述手持外壳包括:高精度GPS接收机、沿着外壳朝向间隔开来的高精度GPS天线、显示器、中心轴线与所述朝向相校准的相机、以及用户界面。电路板连接这些组件且具有处理器,该处理器被编程成使用接收机和天线并且基于所接收的GPS信号来确定所述朝向的方位角、在显示器上显示相机的视图、在叠加在该视图上的显示中心点描绘十字光标、通过用户界面来从用户接收目标坐标、计算目标坐标与所述朝向之间的距离、以及如果该距离短到足以包含在视图内部,则在该显示器的目标坐标上叠加一个靶心、以及在用户移动外壳的

EMC测量天线系数的校准方法和误差分析.docx
EMC测量天线系数的校准方法和误差分析EMC测量天线系数的校准方法和误差分析摘要:天线系数是评估天线传输性能的重要指标之一。在EMC(电磁兼容性)测试中,准确测量和校准天线系数对于确保电磁兼容性的合规性至关重要。本论文主要介绍了常见的天线系数测量方法,并分析了可能导致误差的几个主要因素。鉴于误差对于测量结果的影响,对各种误差进行分析和消除是提高测量准确度的关键。1.引言在电磁兼容性领域,天线系数是指天线能量传输效率的度量。它是评估天线发射和接收性能的重要参考指标。天线系数测量的准确性对于EMC测试的合规性

环形天线校准方法.docx
环形天线校准方法标题:环形天线校准方法引言:在现代通信领域,天线是无线通信系统中不可或缺的组成部分。而准确地校准天线的性能对于确保通信质量和系统性能至关重要。本论文将重点介绍环形天线校准方法,探讨其原理、应用以及相关的研究进展。第一部分:环形天线校准方法的概述一、环形天线的特点和应用领域环形天线作为一种新型的天线结构,其主要特点包括全方向辐射、宽带性能以及机械可靠性。因此,环形天线在无线通信、雷达系统、移动通信和卫星通信等领域都有广泛的应用。二、环形天线校准的意义与挑战环形天线的性能校准直接影响着通信系统

单色仪波长误差校准装置及校准方法.pdf
本发明提供了一种单色仪波长误差校准装置及校准方法,该单色仪波长误差校准装置包括超连续谱激光器、单色仪、干涉组件、探测器、成像单元和控制处理器,单色仪与激光器连接,干涉组件设置在单色仪的正弦驱动机构上,干涉组件用于对单色仪输出的单色光进行干涉以产生干涉条纹,探测器用于采集干涉条纹并显示在成像单元上,控制处理器与单色仪连接,控制处理器用于驱动单色仪的正弦驱动机构反复移动并根据成像单元上的干涉条纹的变化对单色仪的波长误差进行校准。应用本发明的技术方案,以解决现有技术中单色仪波长校准误差较大且不能进行整个波段校准