
一种基于迭代学习控制和主曲线分析的数字预失真系统工作方法.pdf

猫巷****永安


1/10

2/10
3/10

4/10

5/10
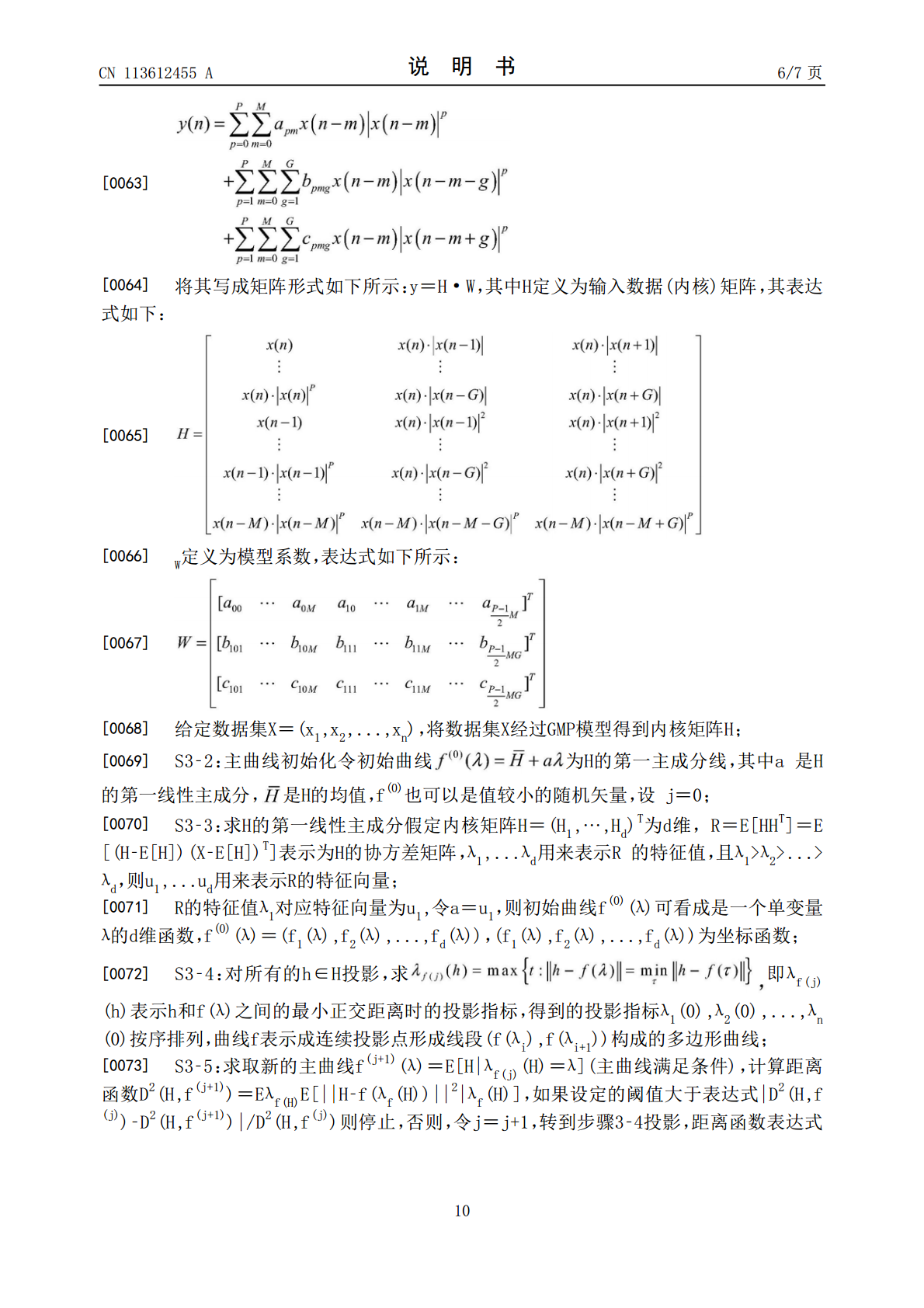
6/10
7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于迭代学习控制和主曲线分析的数字预失真系统工作方法.pdf
一种基于主曲线分析和迭代学习控制的数字预失真系统工作方法,主要涉及功率放大器线性化中的数字预失真技术、宽带功率放大器的行为建模、主曲线分析和迭代学习控制。本发明针对GMP模型内核冗余项过多导致建模精度不够高的问题,提出了一种将主曲线分析与GMP模型结合的建模方法,对于F类功放所提功放建模结构比目前流行的TSVR与GMP算法模型拟合效果均提高约2dB。对于非线性更强的Doherty类功放,基于主曲线分析模型比TSVR的建模准确度提升约4dB,比GMP模型提升则约6dB。本发明所构建预失真结构后输出信号的AC
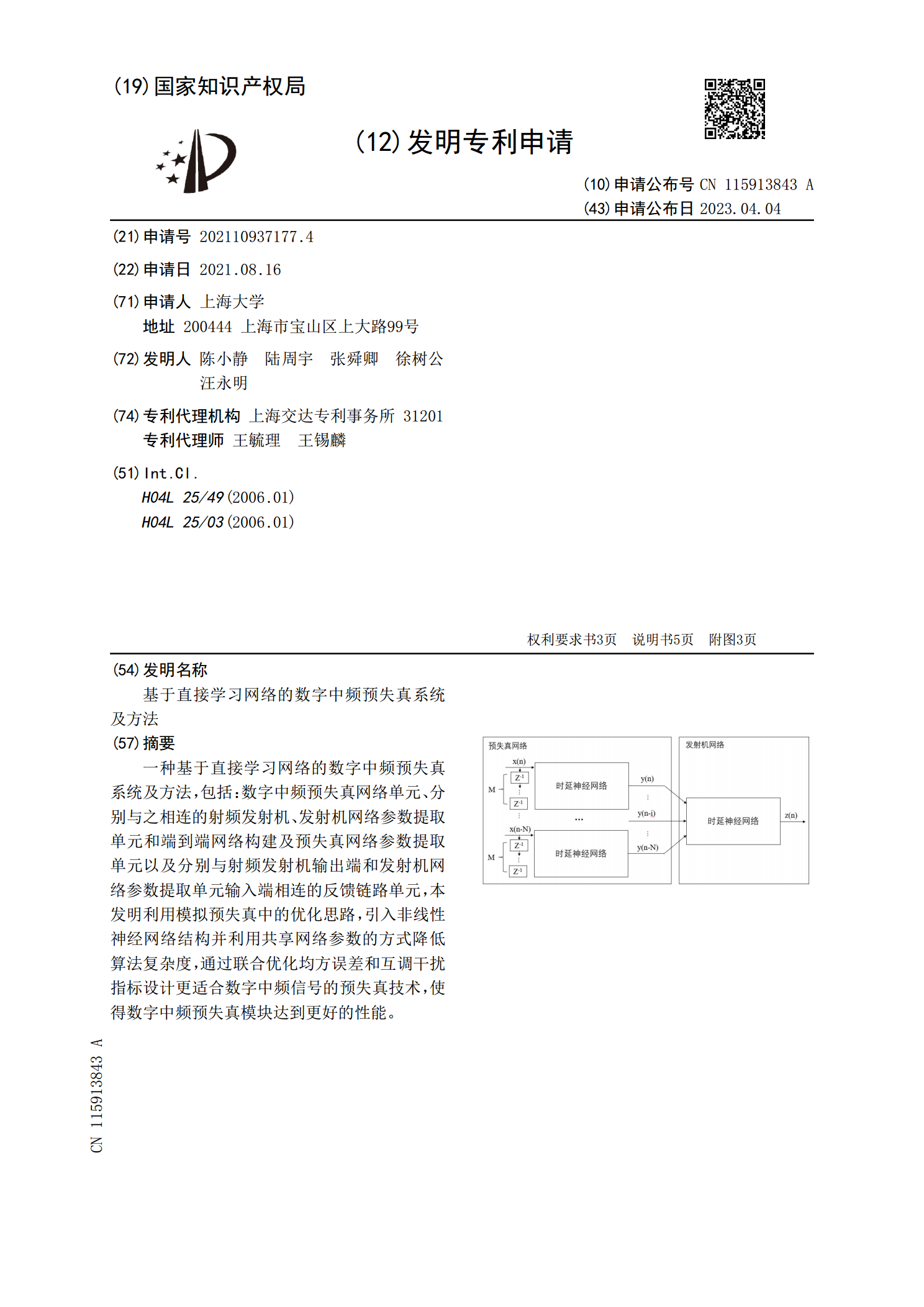
基于直接学习网络的数字中频预失真系统及方法.pdf
一种基于直接学习网络的数字中频预失真系统及方法,包括:数字中频预失真网络单元、分别与之相连的射频发射机、发射机网络参数提取单元和端到端网络构建及预失真网络参数提取单元以及分别与射频发射机输出端和发射机网络参数提取单元输入端相连的反馈链路单元,本发明利用模拟预失真中的优化思路,引入非线性神经网络结构并利用共享网络参数的方式降低算法复杂度,通过联合优化均方误差和互调干扰指标设计更适合数字中频信号的预失真技术,使得数字中频预失真模块达到更好的性能。
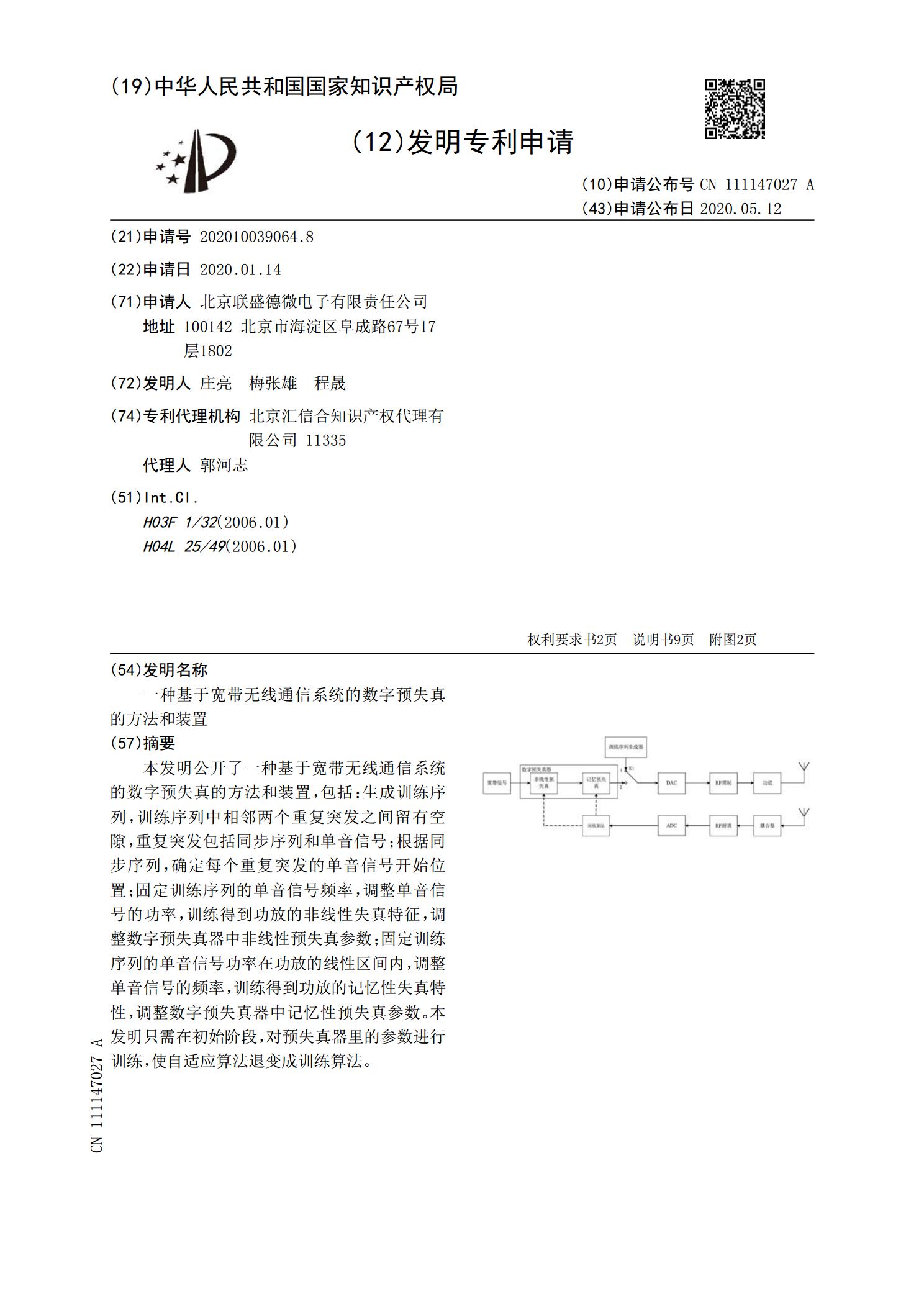
一种基于宽带无线通信系统的数字预失真的方法和装置.pdf
本发明公开了一种基于宽带无线通信系统的数字预失真的方法和装置,包括:生成训练序列,训练序列中相邻两个重复突发之间留有空隙,重复突发包括同步序列和单音信号;根据同步序列,确定每个重复突发的单音信号开始位置;固定训练序列的单音信号频率,调整单音信号的功率,训练得到功放的非线性失真特征,调整数字预失真器中非线性预失真参数;固定训练序列的单音信号功率在功放的线性区间内,调整单音信号的频率,训练得到功放的记忆性失真特性,调整数字预失真器中记忆性预失真参数。本发明只需在初始阶段,对预失真器里的参数进行训练,使自适应算

基于基带-射频联合优化的数字预失真方法及系统.pdf
一种基于基带‑射频联合优化的数字预失真方法及系统,通过采集真实射频功率放大器的收发信号数据集用于对功率放大模型进行训练获取模型系数矢量,采集基带激励信号数据集输入数字预失真模型后经上变频处理后再输入功率放大模型,得到相应的射频输出信号及其功率频谱图;再将射频输出信号进行下变频与线性滤波得到基带恢复信号后通过后失真器模型得到反馈信号,用于计算激励与反馈之间的误差以及MSE,根据数字预失真模型、功率放大模型的模型系数矢量以及上下变频相关参数计算出非线性互调失真的决定因子数学表达式;最后根据基于基带‑射频特性的

数字预失真处理方法和装置.pdf
本发明公开了一种数字预失真处理方法和装置,通过根据信号的实际特点来选取用于生成DPD系数的信号点,从而避免了盲目选取信号点来生成DPD系数而可能产生的导致DPD不稳定的问题。