
人体姿态实时预测方法、系统、介质及设备.pdf

夏萍****文章

1/10
2/10
3/10
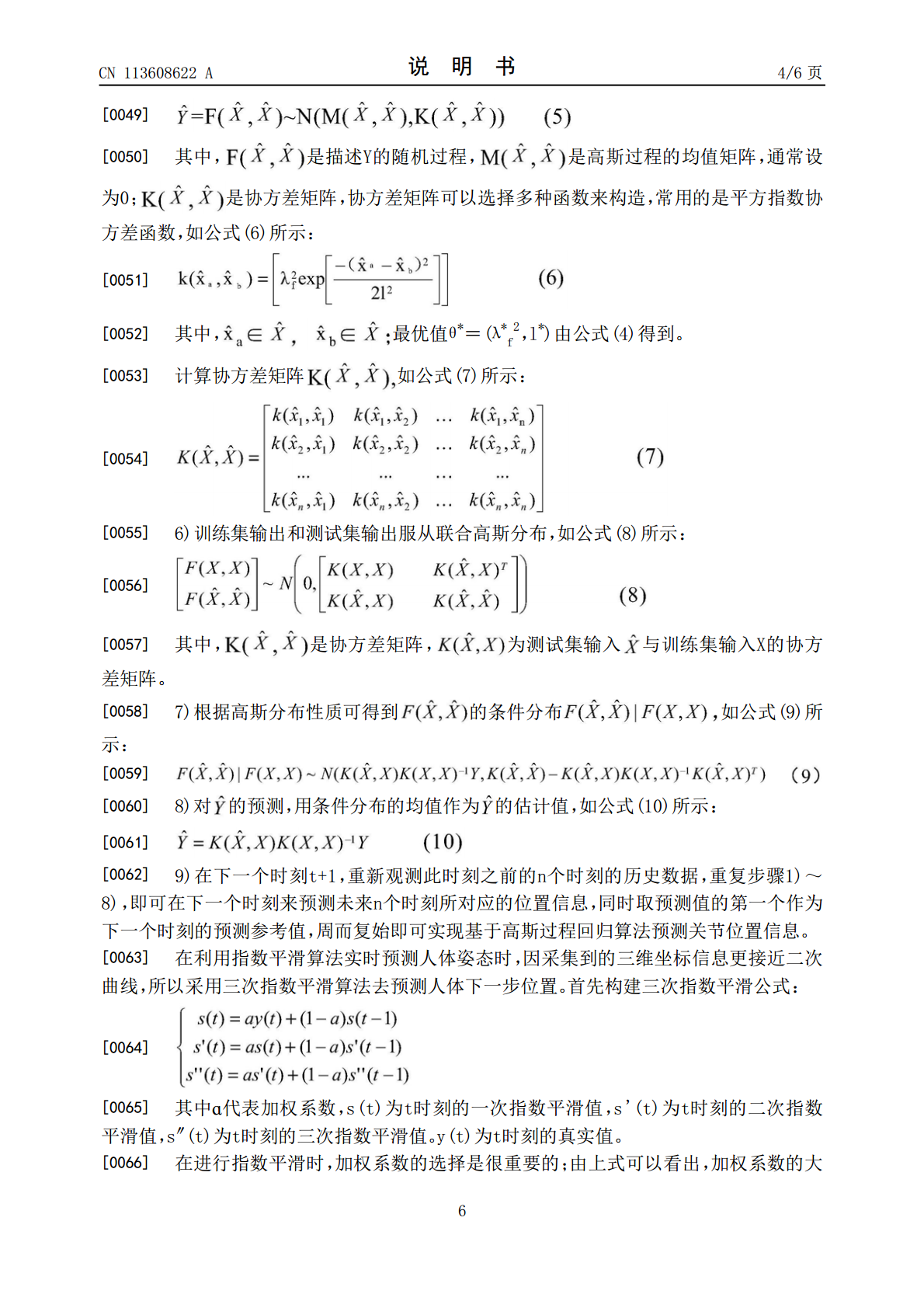
4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

人体姿态实时预测方法、系统、介质及设备.pdf
本发明属于人体姿态估计相关技术领域,提供了一种人体姿态实时预测方法、系统、介质及设备。其中,该方法包括捕获人体目标关节数据并进行预处理,获得人体关节坐标信息;基于人体关节坐标信息及若干个预测模型,得到不同预测模型的人体姿态实时预测值;利用设定长度的滑动窗口比较不同预测模型的人体姿态实时预测值与实际值的误差,选择误差最小的预测模型所对应的预测值作为最终人体姿态实时预测值。

三维人体姿态预测方法、装置、介质及设备.pdf
本申请的实施方式公开了一种三维人体姿态预测方法、神经网络训练方法、装置、电子设备、计算机可读存储介质及计算机程序,其中的三维人体姿态预测方法主要包括:获取待处理图像中的人体关键点信息以及人体关键点的深度前后关系;将所述人体关键点信息和人体关键点的深度前后关系提供给第一神经网络,经由所述第一神经网络执行三维人体姿态预测处理,以获取三维人体姿态预测结果;其中,所述人体关键点的深度前后关系用于表示人体关键点之间的深度位置相对关系。本申请提供的技术方案有利于提高三维人体姿态预测的准确性,从而有利于避免由于三维人体
根据人体姿态实时检测情绪的系统.pdf
本发明涉及情绪监测技术领域,公开了一种根据人体姿态实时检测情绪的系统,包括以下步骤:S1:通过摄像头获取视频流;S2:将视频流数据进行处理后送入人体姿态估计网络处理,得到人体关节点信息;S3:对获取到的人体关节点信息进行处理并获得关键识别特征;S4:构建情绪识别网络,并对情绪识别网络添加时间注意力机制以及采取循环训练策略﹐将关键识别特征送入情绪识别网络并进行情绪分类;S5:得到高兴、悲伤、愤怒、中性四种情绪分类结果,输出当前视频中人的情绪;S6:将当前视频中人的情绪实时显示在网页上。本发明利用骨骼点特征进

实时姿态估计运动分析方法、系统、计算机设备及存储介质.pdf
本发明公开了一种实时姿态估计运动分析方法、系统、计算机设备及存储介质,所述方法包括:获取用户的实时视频;将视频帧输入训练好的双分支深度网络中进行特征采集,得到人体的关节点热图以及关节点之间的亲和区域;对关节点热图多峰值采取非极大值抑制,选取得到一系列候选关节点,将候选关节点之间相互连接构成二分图,并对二分图进行优化;根据优化后的二分图,对用户实时运动时相邻视频帧间的关节像素点进行畸变矫正,并计算肢体角度信息,得到四肢运动数据;在接收到用户发送的咨询指令后,对四肢运动数据进行运动分析,输出运动分析结果。本发

人体姿态还原方法、装置、终端设备及存储介质.pdf
本申请适用于运动捕捉技术领域,提供了一种人体姿态还原方法、装置、终端设备及存储介质,所述人体姿态还原方法包括:获取与目标运动场景相关的目标运动数据,所述目标运动场景是指人体的运动所属的场景;根据所述目标运动数据,确定运动捕捉设备在所述人体上的目标安装位置;根据所述目标运动数据与所述人体上的目标安装位置,训练神经网络;在所述运动捕捉设备已安装在所述目标安装位置的情况下,获取所述运动捕捉设备捕捉的运动数据;将所述运动捕捉设备捕捉的运动数据输入到已训练的神经网络中,还原出所述人体的运动姿态。采用上述方法可以解决