
倒立摆滑模变结构稳定控制.pptx

新槐****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

倒立摆滑模变结构稳定控制.pptx
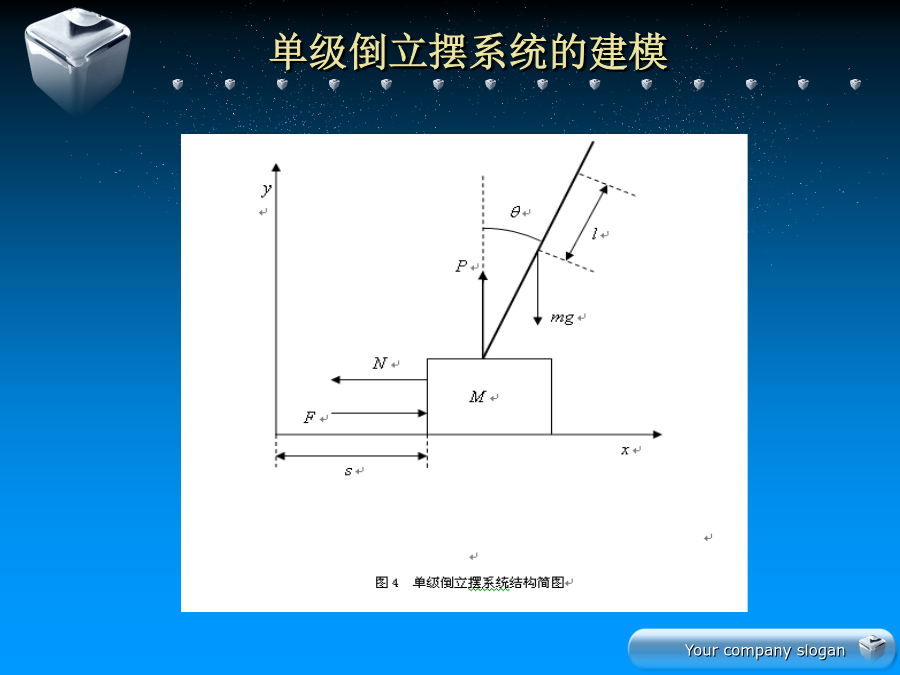
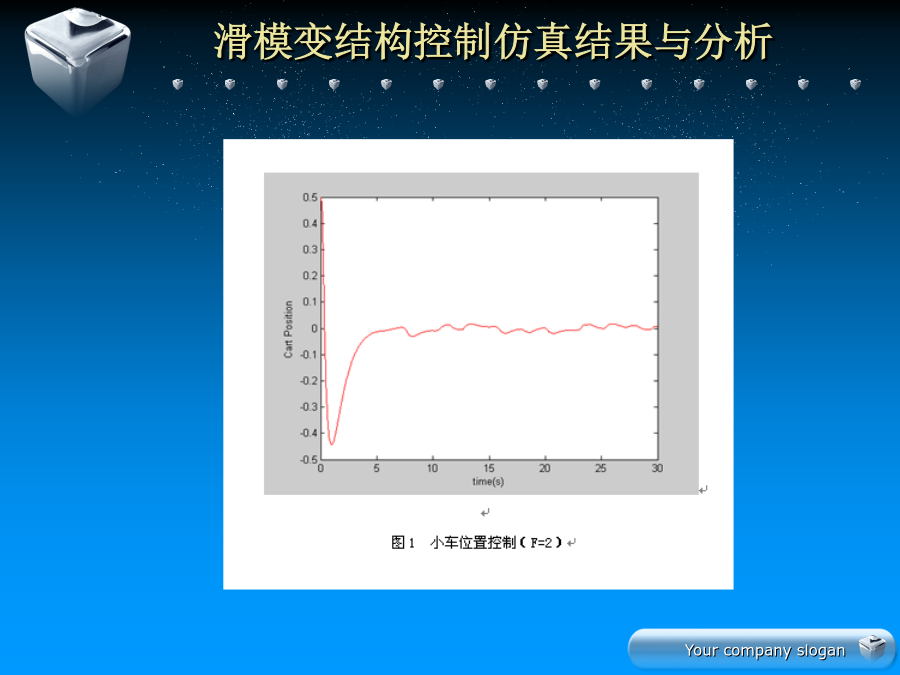
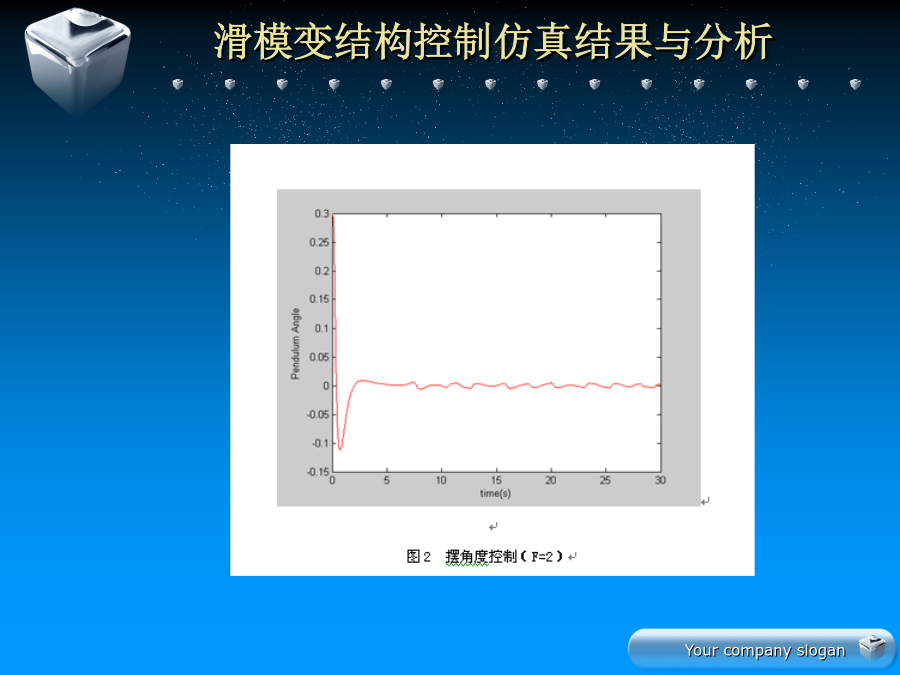
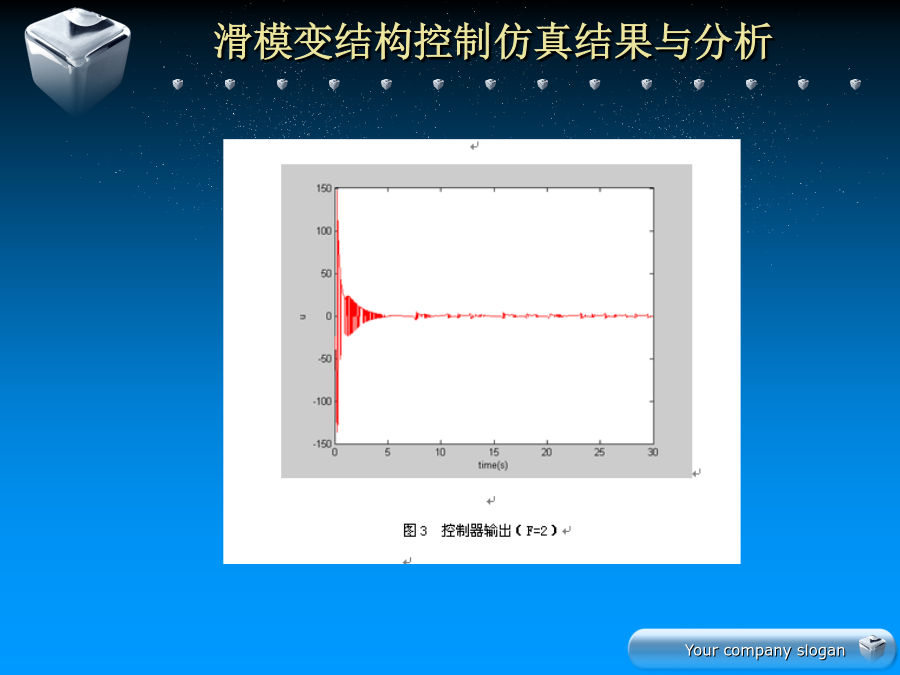
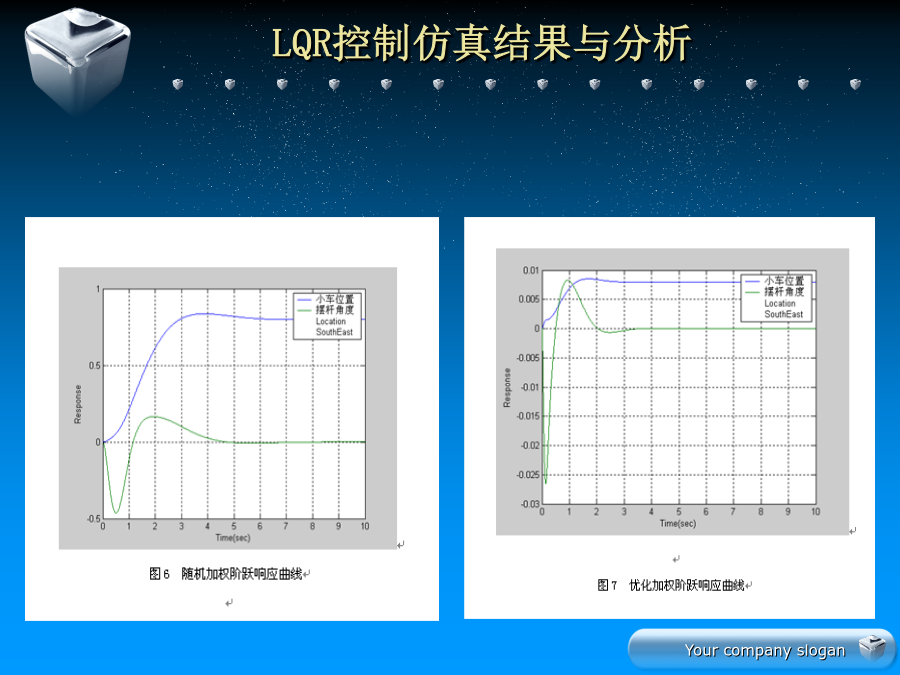
利用滑模变结构控制对直线一级倒立摆系统进行了有效控制。首先对一级倒立摆系统的模型进行线性化处理,再利用滑模变结构控制方法及LQR控制对此模型中摆的镇定、台车位置的调节和系统参数不确定性设计了具体的控制规律,并使用饱和函数的方法抑制系统的抖振。最后在Matlab/Simulink上进行了仿真实验,实验结果说明滑模变结构控制方法是有效的。绪论预备知识单级倒立摆系统的建模滑模变结构控制仿真结果与分析滑模变结构控制仿真结果与分析滑模变结构控制仿真结果与分析LQR控制仿真结果与分析小结衷心感谢各位老师的点评!

直线倒立摆的变结构稳定控制研究.docx
直线倒立摆的变结构稳定控制研究摆的稳定控制一直以来都是自动控制领域的研究重点之一。本文将介绍直线倒立摆的变结构稳定控制研究,并探究该方法在实际应用中的优缺点。首先,我们需要明确什么是直线倒立摆。直线倒立摆是一种经典的力学实验,其由一个可以在水平直线上滑动的小车和可以上下转动的倒立摆组成。倒立摆的稳定是通过改变小车的速度来控制的。传统的倒立摆控制方法主要包括PID控制器、滑模控制器和模糊控制器等,这些方法在控制效果和稳定性上都有其限制。近年来,变结构控制在倒立摆控制领域得到了越来越广泛的应用。变结构控制是一

直线倒立摆的变结构稳定控制研究的中期报告.docx
直线倒立摆的变结构稳定控制研究的中期报告一、研究背景直线倒立摆是一个典型的非线性系统,具有复杂的动力学特性。在控制理论和工程应用中,直线倒立摆是一个重要的研究对象。传统的控制方法包括PID控制、自适应控制等,然而这些方法都面临着一些困难,比如收敛速度较慢、对参数变化敏感等问题。因此,针对直线倒立摆的控制研究一直是一个热门的课题。本研究通过应用变结构控制方法,探索一种新的直线倒立摆控制策略,以提高系统的控制性能和鲁棒性。具体而言,本研究考虑的是基于变结构的滑模控制方法,对直线倒立摆进行控制。二、研究内容1.

平面二级倒立摆的模糊滑模变结构控制算法研究的任务书.docx
平面二级倒立摆的模糊滑模变结构控制算法研究的任务书一、背景倒立摆是一种经典的控制问题,其被广泛用于机器人控制、智能控制和机械工程等领域,因为倒立摆非线性、时变且具有多个自由度并且受到外部扰动,所以对于其稳定控制一直具有挑战性。由于模糊控制技术具有适应不确定性、模型简单和易于实现等优势,在倒立摆的控制中得到了广泛应用。然而,模糊控制系统的输出结果常常存在着振荡和收敛速度慢等问题。因此,研究如何解决这些问题是非常必要的。滑模变结构控制技术是一种针对非线性系统的强鲁棒性控制方法,它可以快速响应和强鲁棒性。因此,

倒立摆系统的变结构控制方法研究.docx
倒立摆系统的变结构控制方法研究摘要:倒立摆系统是一个具有非线性、多变量、强耦合特性的复杂系统,其动态行为非常复杂。在实际应用中,如何实现倒立摆的稳定控制一直是一个具有挑战性的问题。本文针对倒立摆系统的变结构控制方法进行了研究。首先介绍了倒立摆系统的基本原理及其数学模型。然后,分析了传统的PID控制方法在处理非线性、多变量系统中存在的问题。接着,详细介绍了变结构控制方法的基本原理和主要特点。最后,通过设计仿真实验,验证了变结构控制方法在倒立摆系统中的有效性和优越性。关键词:倒立摆系统,变结构控制,PID控制