
基于融合仿射变换的纹理图像目标定位方法.pdf

Ch****91

1/8
2/8

3/8
4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于融合仿射变换的纹理图像目标定位方法.pdf
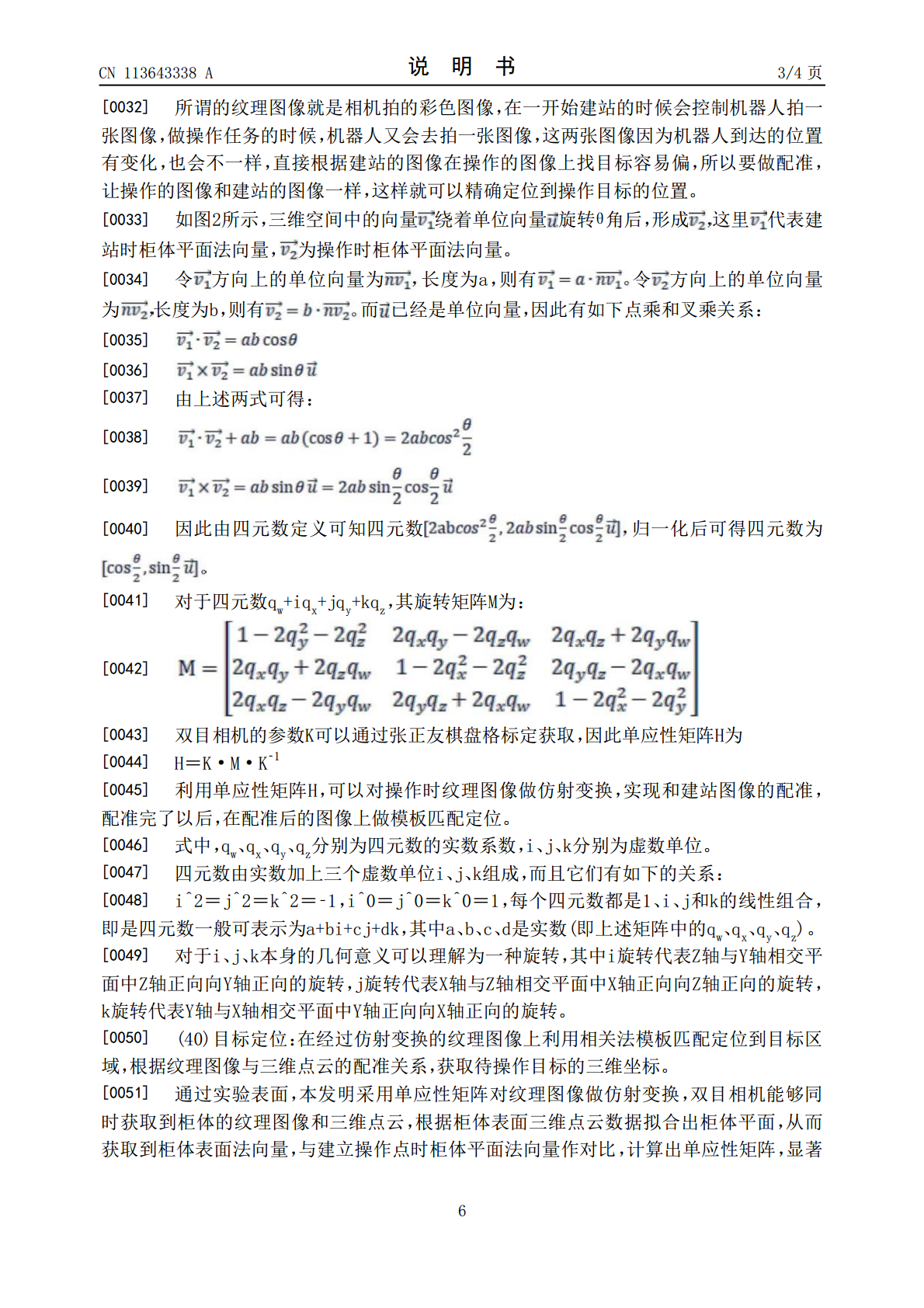
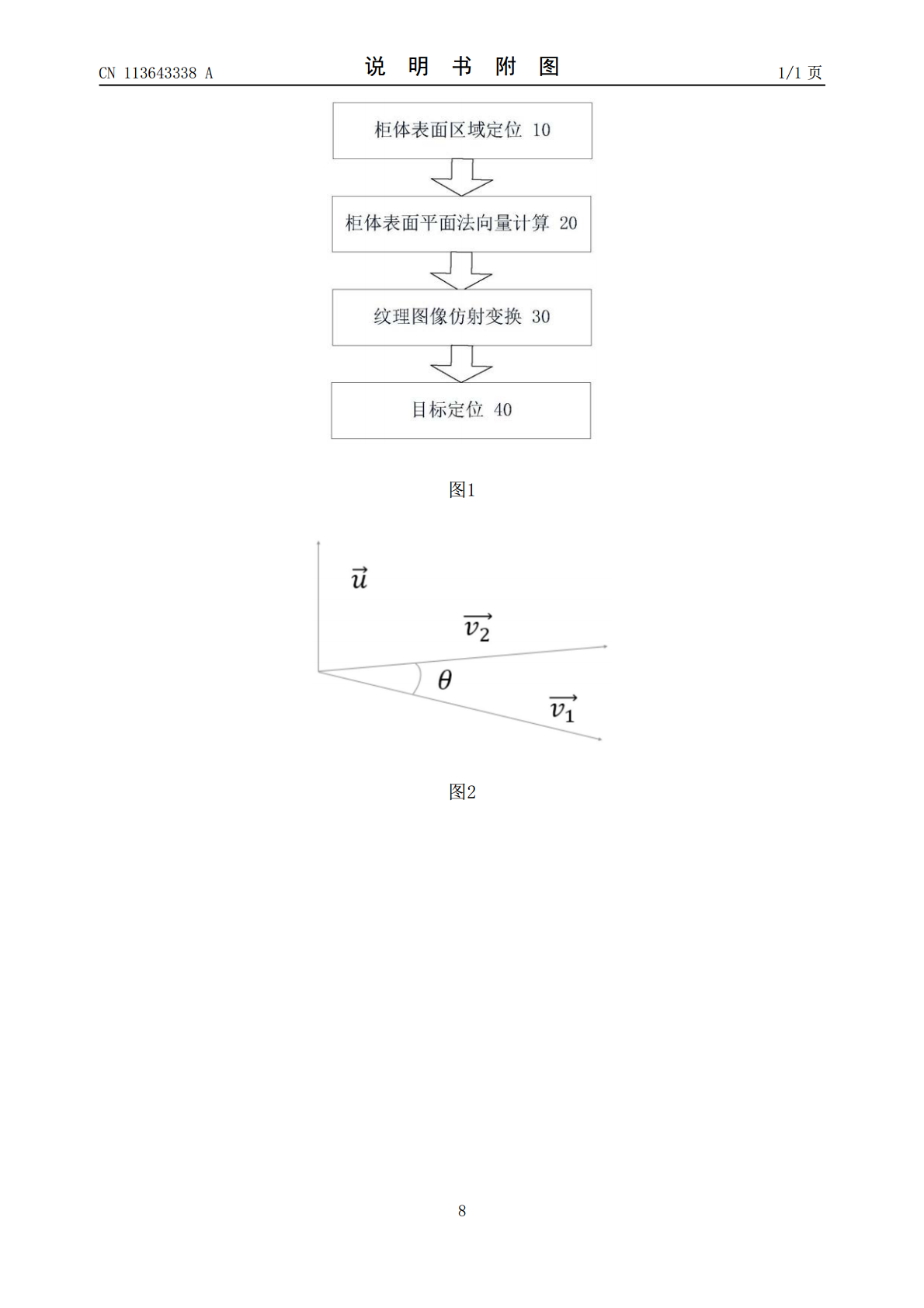
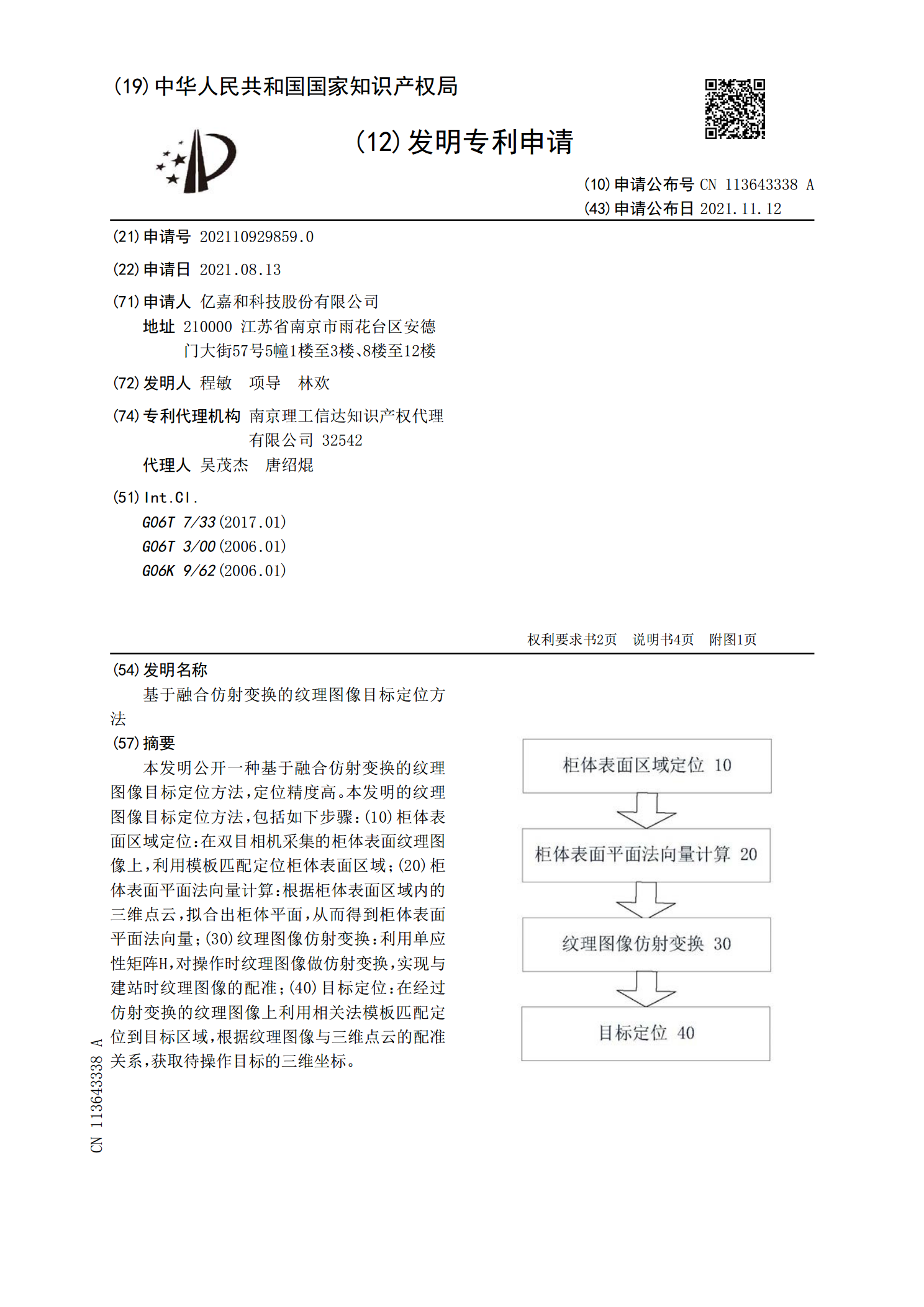
本发明公开一种基于融合仿射变换的纹理图像目标定位方法,定位精度高。本发明的纹理图像目标定位方法,包括如下步骤:(10)柜体表面区域定位:在双目相机采集的柜体表面纹理图像上,利用模板匹配定位柜体表面区域;(20)柜体表面平面法向量计算:根据柜体表面区域内的三维点云,拟合出柜体平面,从而得到柜体表面平面法向量;(30)纹理图像仿射变换:利用单应性矩阵H,对操作时纹理图像做仿射变换,实现与建站时纹理图像的配准;(40)目标定位:在经过仿射变换的纹理图像上利用相关法模板匹配定位到目标区域,根据纹理图像与三维点云的

基于仿射变换的图像分块拼接方法.docx
基于仿射变换的图像分块拼接方法基于仿射变换的图像分块拼接方法摘要:图像拼接是计算机视觉领域的重要研究方向,它可以将多个图像拼接成一个大图像,为应用程序提供更大的视野和更丰富的信息。在本文中,我们提出了一种基于仿射变换的图像分块拼接方法。我们首先将要拼接的图像分割成多个小块,然后使用仿射变换将这些小块拼接成一个完整的图像。通过实验证明,我们的方法在图像拼接任务中表现出较好的性能和鲁棒性。关键词:图像拼接;仿射变换;图像分块;鲁棒性引言图像拼接是计算机视觉领域的研究热点之一,它可以将多个图像拼接成一个更大的图

基于图像仿射变换技术与小波融合的人脸预测与还原研究.docx
基于图像仿射变换技术与小波融合的人脸预测与还原研究基于图像仿射变换技术与小波融合的人脸预测与还原研究摘要:本文通过使用图像仿射变换技术与小波融合算法相结合的方法,对人脸进行预测与还原。首先,我们利用图像仿射变换技术对输入图像进行预处理,得到更好的对齐效果。然后,采用小波融合算法对预处理后的图像进行进一步处理,提取出图像的细节和纹理信息。最后,我们利用这些信息进行人脸的预测与还原。实验结果表明,本文提出的方法在人脸预测与还原方面取得了较好的效果。关键词:人脸预测,人脸还原,图像仿射变换,小波融合1.引言人脸

图像仿射模变换均匀置乱方法研究.pptx
图像仿射模变换均匀置乱方法研究目录添加章节标题研究背景与意义图像加密的重要性现有加密方法的不足研究目的与意义相关研究综述图像加密技术的研究现状仿射模变换的研究现状均匀置乱方法的研究现状相关研究的优缺点分析研究内容与方法图像仿射模变换均匀置乱算法设计算法实现与优化实验设计与分析结果对比与讨论研究结果与贡献实验结果展示与分析与现有方法的比较与分析本研究的创新点与贡献对未来研究的建议与展望结论与展望研究结论总结研究成果的应用前景对未来研究的展望THANKYOU

基于图像处理与仿射变换的零件轮廓形状检测方法及装置.pdf
本发明公开了一种基于图像处理与仿射变换的零件轮廓形状检测方法及装置,所述方法包括:采集待检产品的图像I