
模型迁移方法、装置.pdf

春岚****23

1/10
2/10
3/10
4/10
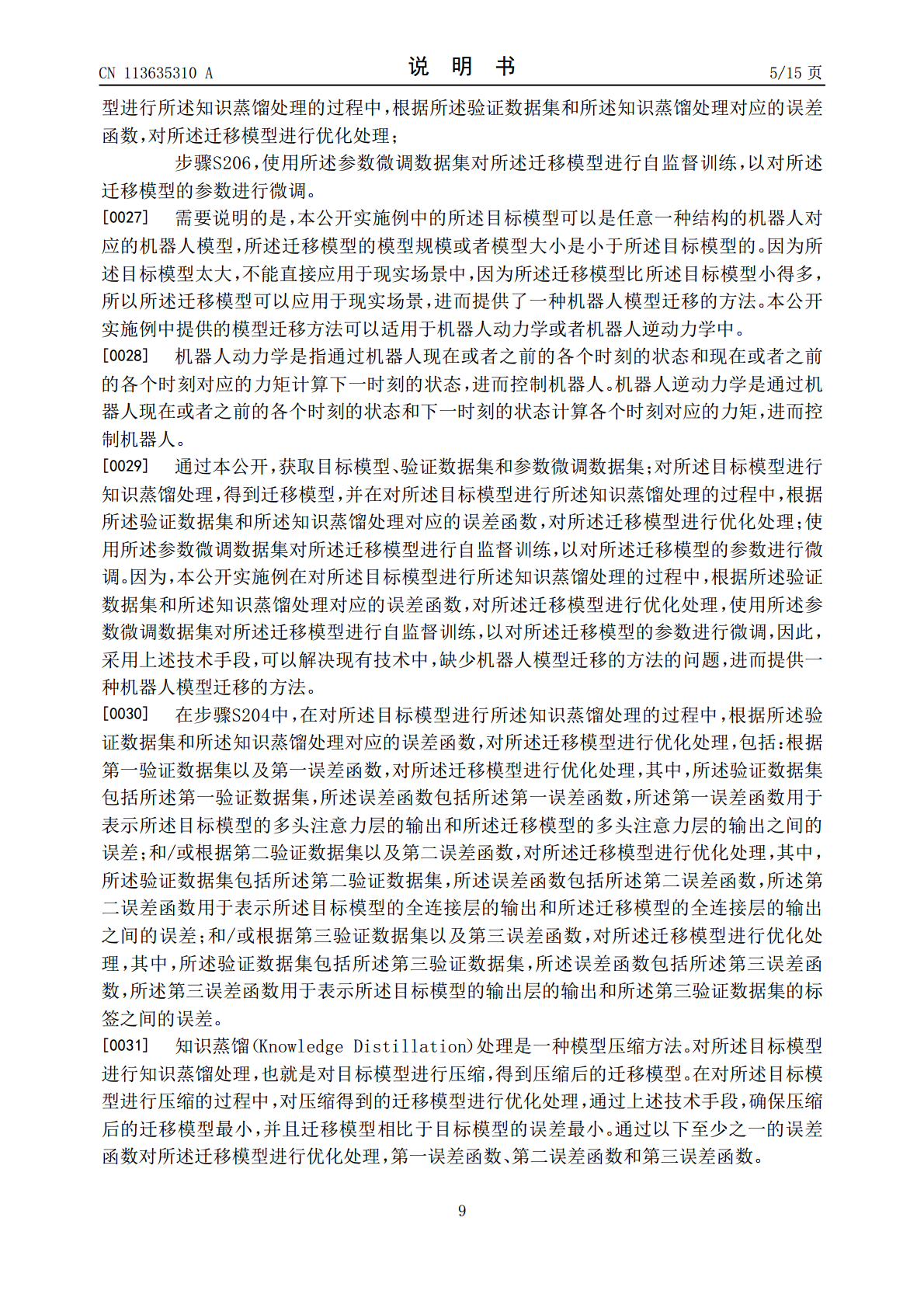
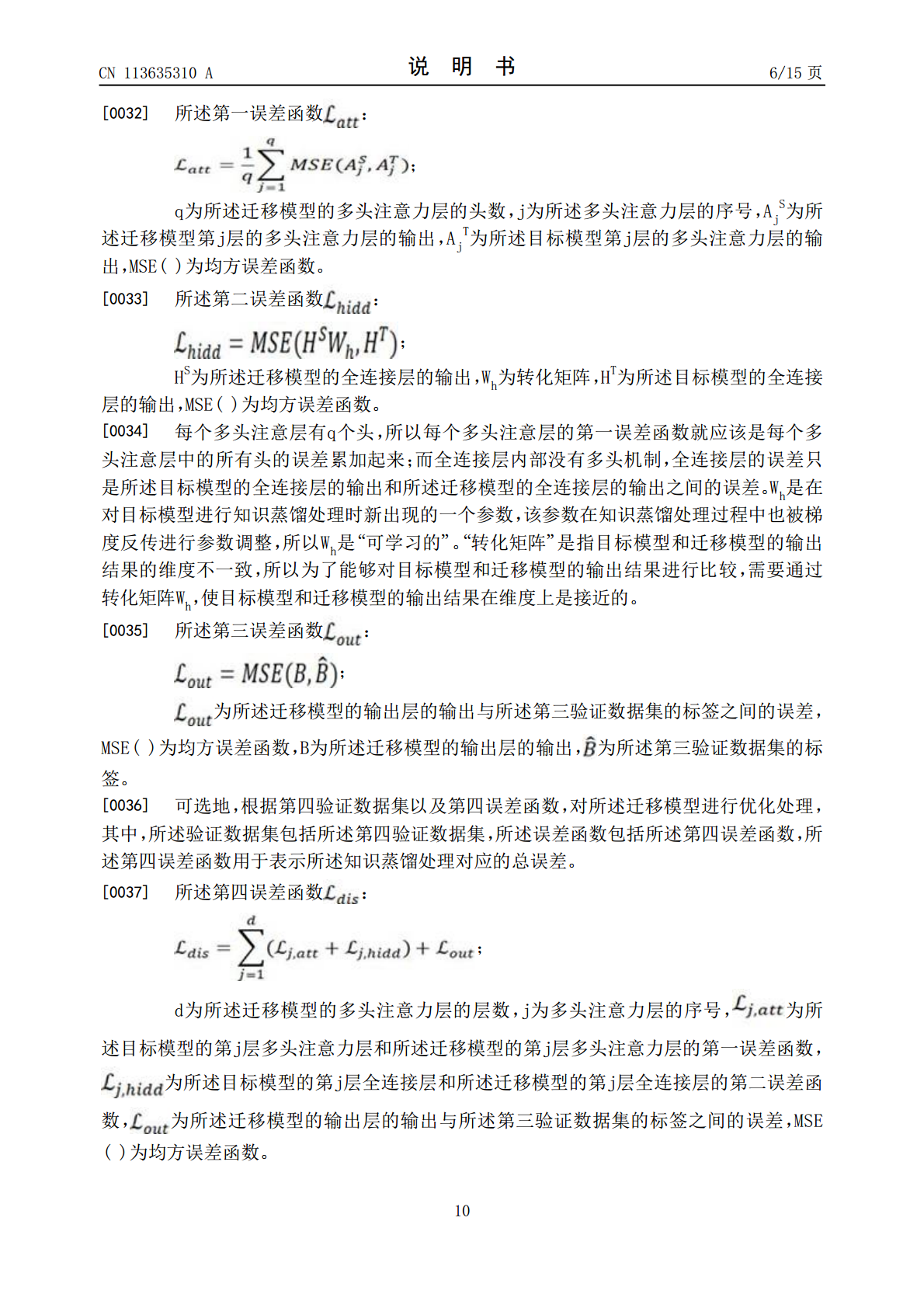
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
模型迁移方法、装置.pdf
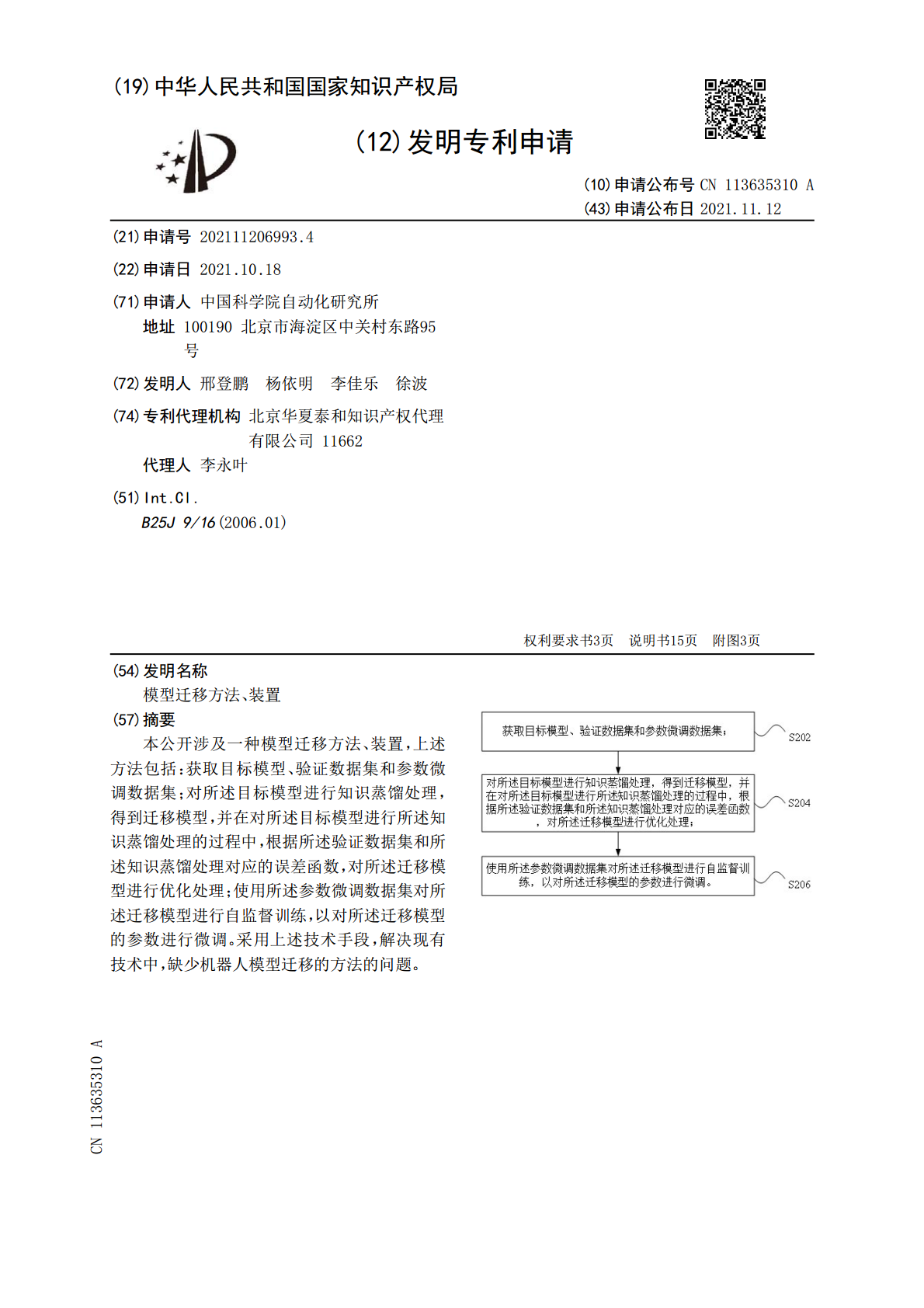
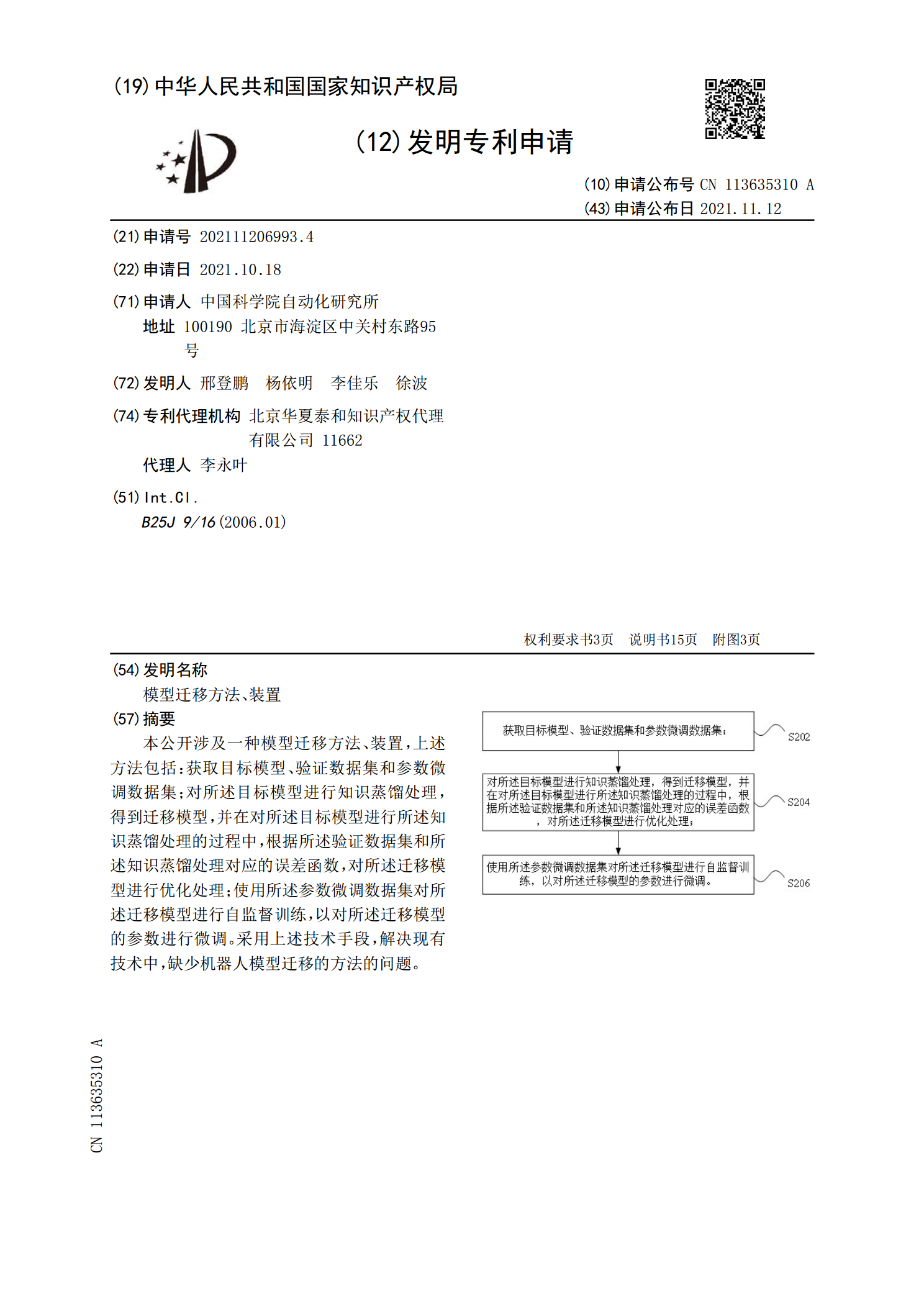
本公开涉及一种模型迁移方法、装置,上述方法包括:获取目标模型、验证数据集和参数微调数据集;对所述目标模型进行知识蒸馏处理,得到迁移模型,并在对所述目标模型进行所述知识蒸馏处理的过程中,根据所述验证数据集和所述知识蒸馏处理对应的误差函数,对所述迁移模型进行优化处理;使用所述参数微调数据集对所述迁移模型进行自监督训练,以对所述迁移模型的参数进行微调。采用上述技术手段,解决现有技术中,缺少机器人模型迁移的方法的问题。
图像迁移方法和图像迁移模型的训练方法、装置.pdf
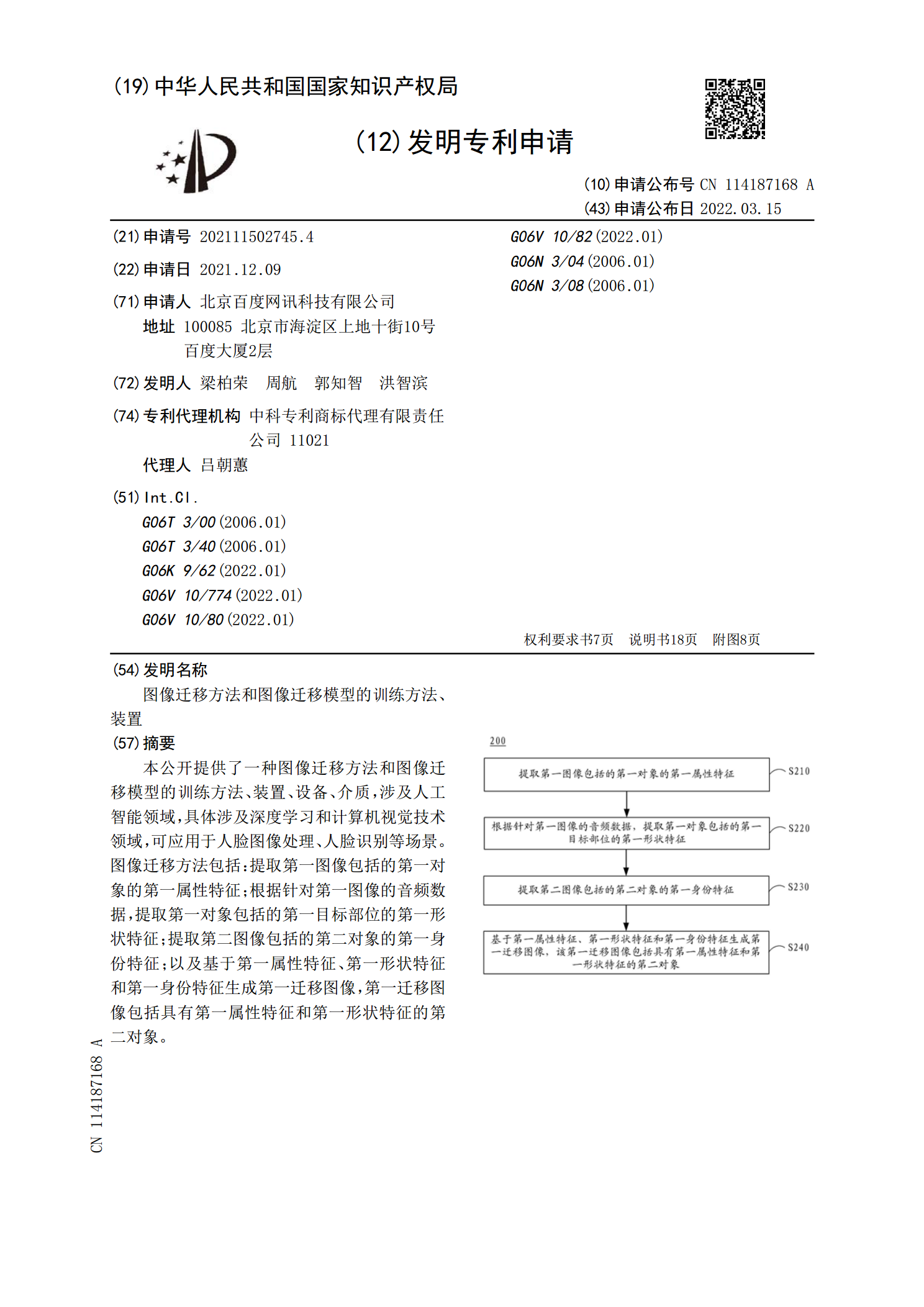
本公开提供了一种图像迁移方法和图像迁移模型的训练方法、装置、设备、介质,涉及人工智能领域,具体涉及深度学习和计算机视觉技术领域,可应用于人脸图像处理、人脸识别等场景。图像迁移方法包括:提取第一图像包括的第一对象的第一属性特征;根据针对第一图像的音频数据,提取第一对象包括的第一目标部位的第一形状特征;提取第二图像包括的第二对象的第一身份特征;以及基于第一属性特征、第一形状特征和第一身份特征生成第一迁移图像,第一迁移图像包括具有第一属性特征和第一形状特征的第二对象。
图像迁移方法和图像迁移模型的训练方法、装置.pdf
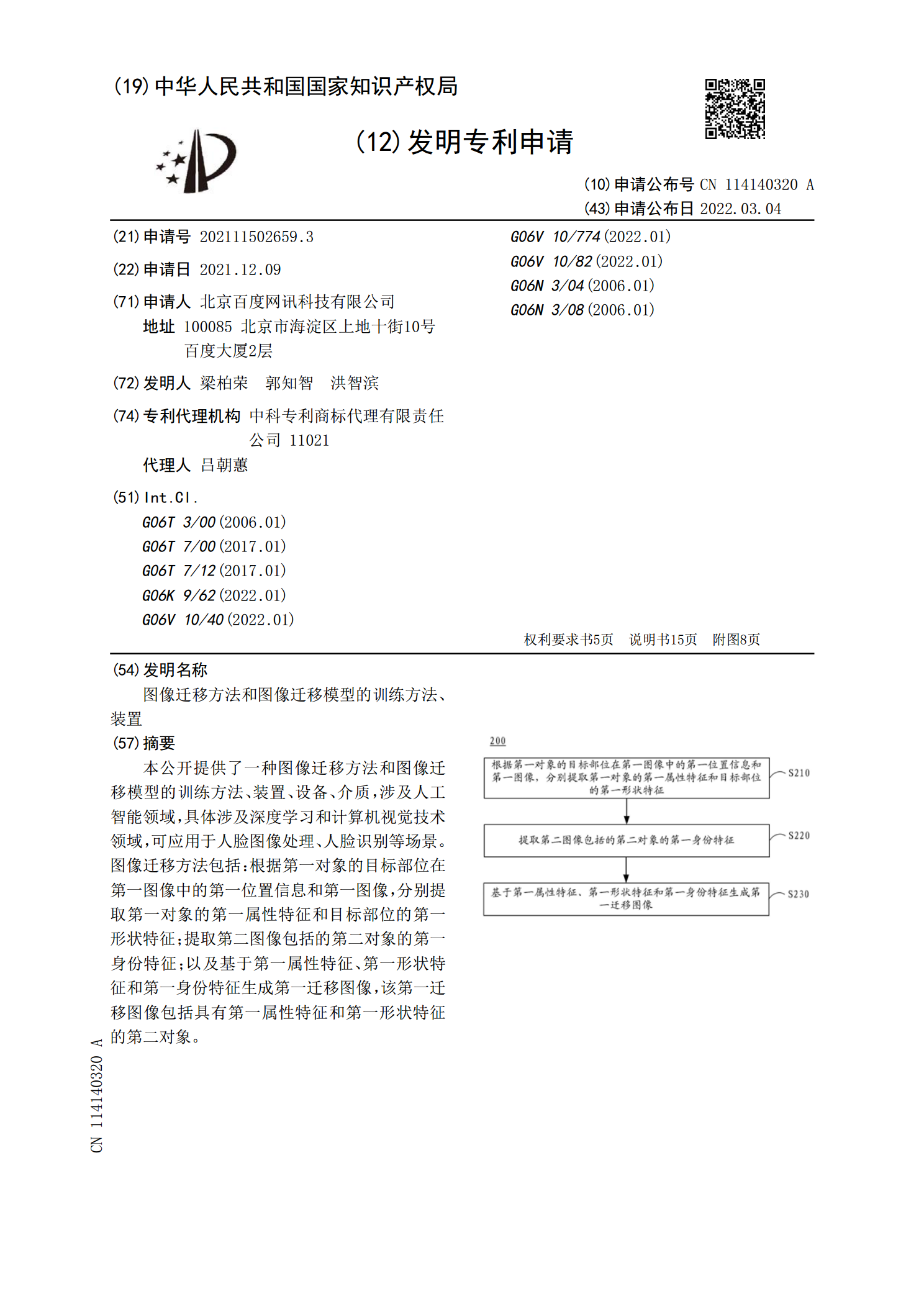
本公开提供了一种图像迁移方法和图像迁移模型的训练方法、装置、设备、介质,涉及人工智能领域,具体涉及深度学习和计算机视觉技术领域,可应用于人脸图像处理、人脸识别等场景。图像迁移方法包括:根据第一对象的目标部位在第一图像中的第一位置信息和第一图像,分别提取第一对象的第一属性特征和目标部位的第一形状特征;提取第二图像包括的第二对象的第一身份特征;以及基于第一属性特征、第一形状特征和第一身份特征生成第一迁移图像,该第一迁移图像包括具有第一属性特征和第一形状特征的第二对象。
图像风格迁移模型的训练方法、图像风格迁移方法及装置.pdf
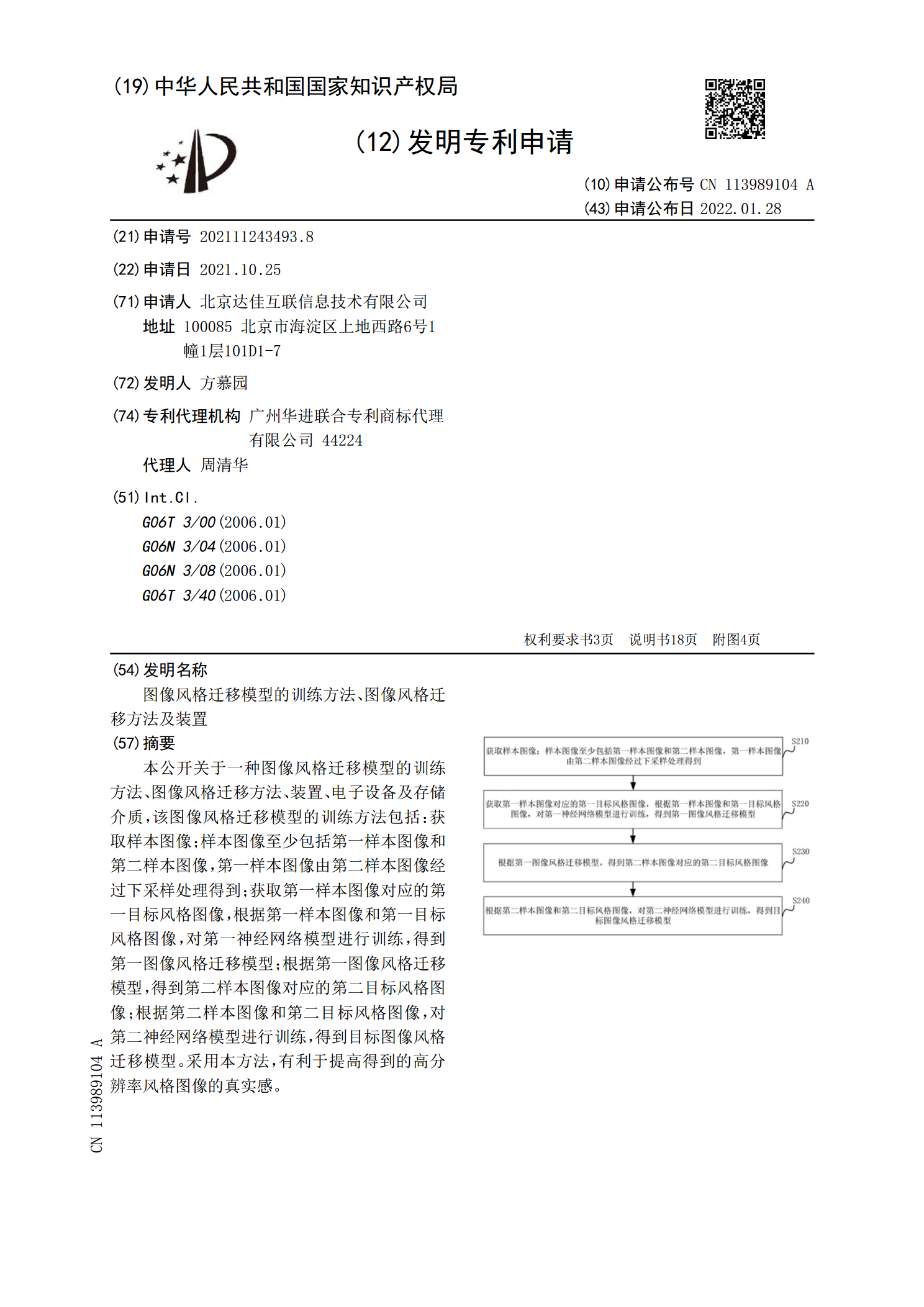
本公开关于一种图像风格迁移模型的训练方法、图像风格迁移方法、装置、电子设备及存储介质,该图像风格迁移模型的训练方法包括:获取样本图像;样本图像至少包括第一样本图像和第二样本图像,第一样本图像由第二样本图像经过下采样处理得到;获取第一样本图像对应的第一目标风格图像,根据第一样本图像和第一目标风格图像,对第一神经网络模型进行训练,得到第一图像风格迁移模型;根据第一图像风格迁移模型,得到第二样本图像对应的第二目标风格图像;根据第二样本图像和第二目标风格图像,对第二神经网络模型进行训练,得到目标图像风格迁移模型。

模型迁移方法、装置及电子设备.pdf
一种模型迁移方法及装置,所述方法包括:基于源场景中的第一训练样本数据、与第一训练样本数据对应的样本标签对所述模型进行模型训练,得到训练完成的所述决策树模型;基于目标场景中的无样本标签对应的第二训练样本数据,对训练完成的所述决策树模型中的每个决策树分别进行剪枝处理,以完成将所述决策树模型从源场景迁移至目标场景。一方面,解决了目标场景无标签情况下模型初始化的问题,并提升迁移模型在目标场景的泛化效能;另一方面,仅需将源场景训练的决策树模型的模型参数输出到目标场景,无需要使用源场景下的数据,满足了数据安全和隐私保