
立体匹配方法、模型训练方法、相关装置及电子设备.pdf

宜欣****外呢


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

立体匹配方法、模型训练方法、相关装置及电子设备.pdf
本公开提供了一种立体匹配方法、模型训练方法、相关装置及电子设备,涉及计算机视觉、深度学习等人工智能技术领域。具体实现方案为:获取第一双目图像;将所述第一双目图像输入至目标模型执行第一操作,得到所述第一双目图像的第一初始视差图,以及相对于所述第一初始视差图的第一偏移视差图;将所述第一初始视差图和所述第一偏移视差图进行聚合,得到所述第一双目图像的第一目标视差图;其中,所述第一初始视差图基于与所述第一双目图像对应的第二双目图像进行立体匹配得到,所述第二双目图像的尺寸小于所述第一双目图像的尺寸,所述第一偏移视差图

模型训练方法、装置及电子设备.pdf
本公开实施例公开了一种模型训练方法、装置及电子设备,所述方法包括:获取多个样本路线以及所述样本路线对应的路线附加信息;确定所述样本路线对应的目标路段集合;所述目标路段集合包括至少一个目标路段;基于所述样本路线对应的所述目标路段集合以及所述路线附加信息训练机器自学习模型,以确定所述目标路段集合中所述目标路段的路段附加信息。该技术方案由于采用的是利用样本路线的真实路线附加信息求解出的目标路段的路段附加信息,从能够提高所预测路线的路线附加信息的准确率。
时间预测方法、模型训练方法、相关装置及电子设备.pdf
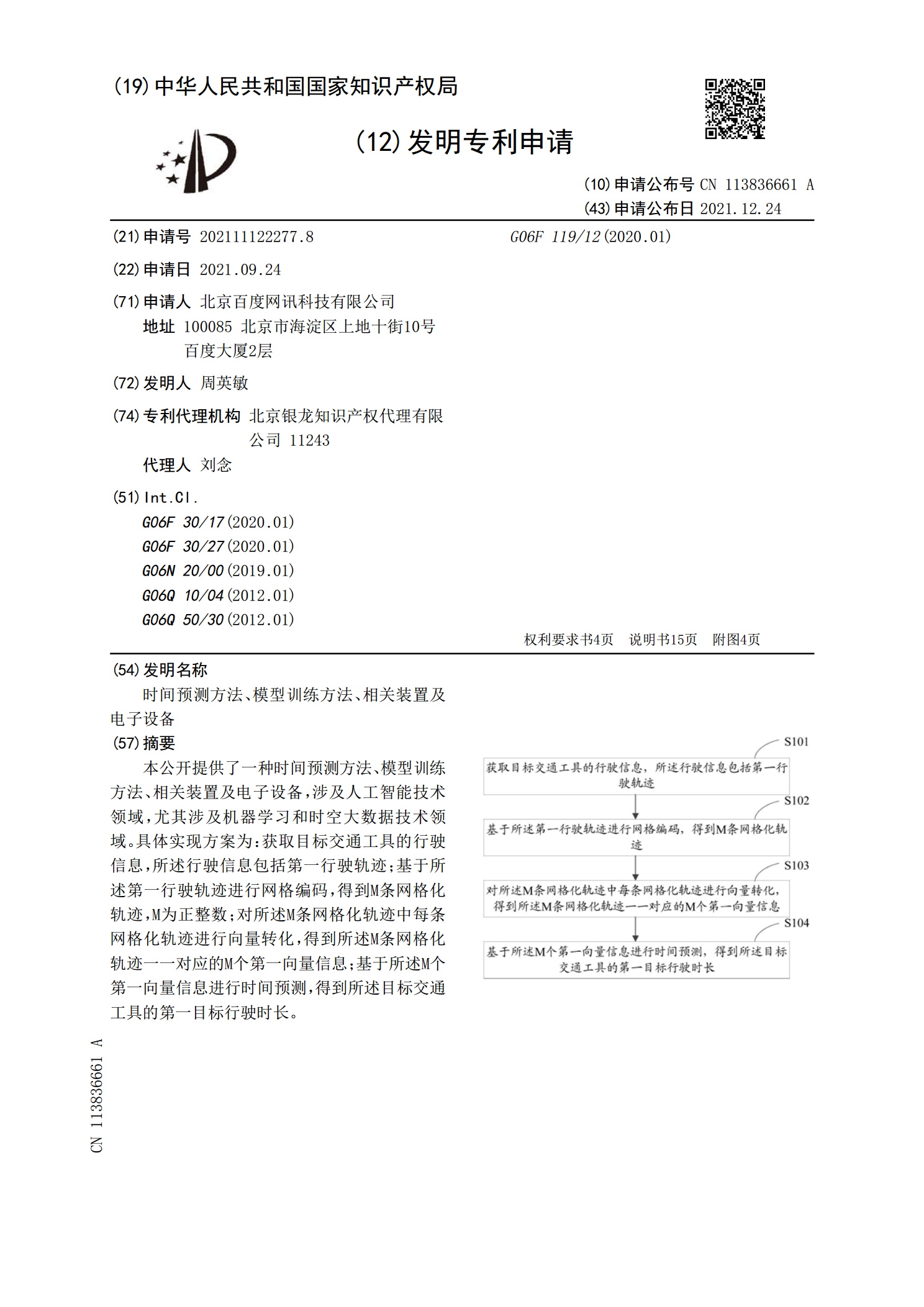
本公开提供了一种时间预测方法、模型训练方法、相关装置及电子设备,涉及人工智能技术领域,尤其涉及机器学习和时空大数据技术领域。具体实现方案为:获取目标交通工具的行驶信息,所述行驶信息包括第一行驶轨迹;基于所述第一行驶轨迹进行网格编码,得到M条网格化轨迹,M为正整数;对所述M条网格化轨迹中每条网格化轨迹进行向量转化,得到所述M条网格化轨迹一一对应的M个第一向量信息;基于所述M个第一向量信息进行时间预测,得到所述目标交通工具的第一目标行驶时长。

文本分类方法、模型训练方法、相关装置及电子设备.pdf
本公开提供了一种文本分类方法、模型训练方法、相关装置及电子设备,涉及人工智能技术领域,具体涉及智能搜索、深度学习技术领域。具体实现方案为:获取目标场景下的第一文本,以及获取所述目标场景下的第一数据集,所述第一数据集包括M个类别下的K个第二文本,每个类别下对应至少一个所述第二文本;对所述第一文本进行特征编码,得到第一特征;以及分别对所述K个第二文本进行特征编码,得到K个第二特征;分别确定所述第一特征和所述K个第二特征之间的相似度,得到所述M个类别对应的M个第一相似度;基于所述M个第一相似度,确定所述第一文本

频闪场景分类方法、模型训练方法、相关装置及电子设备.pdf
本申请公开了一种频闪场景分类方法、模型训练方法、相关装置及电子设备,属于人工智能技术领域。该方法包括:获取同一拍摄场景下的第一图像对,所述第一图像对包括第一图像和第二图像;对所述第一图像和所述第二图像进行特征处理,得到所述第一图像的第一图像特征和所述第二图像的第二图像特征;对所述第一图像特征和所述第二图像特征进行拼接,得到第一目标图像特征;基于所述第一目标图像特征,对所述拍摄场景进行频闪场景分类,得到第一分类结果,所述第一分类结果用于表征所述第一图像对的频闪强度等级。