
一种3D打印方法和装置.pdf

星菱****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种3D打印方法和装置.pdf
本申请公开了一种3D打印方法,包括:在启动3D打印后,通过机械臂的位置信息,启动至少2个图像采集装置进行机械臂的连续拍摄;将采集到的各帧图像进行质量优化;利用经过训练的目标识别算法识别出首帧图像的喷头区域,并利用目标跟踪算法在后续各帧图像中进行喷头区域的跟踪;确定出每一帧图像的喷头区域中的喷头末端的位置信息,并通过在同一时刻采集到的各帧图像的位置信息,确定出该时刻的喷头末端的三维坐标;基于确定出的各个时刻的喷头末端的三维坐标,以及各个时刻的喷头末端的坐标输入值,进行3D打印的补偿。应用本申请的方案,有效地
一种3D打印装置及打印方法.pdf
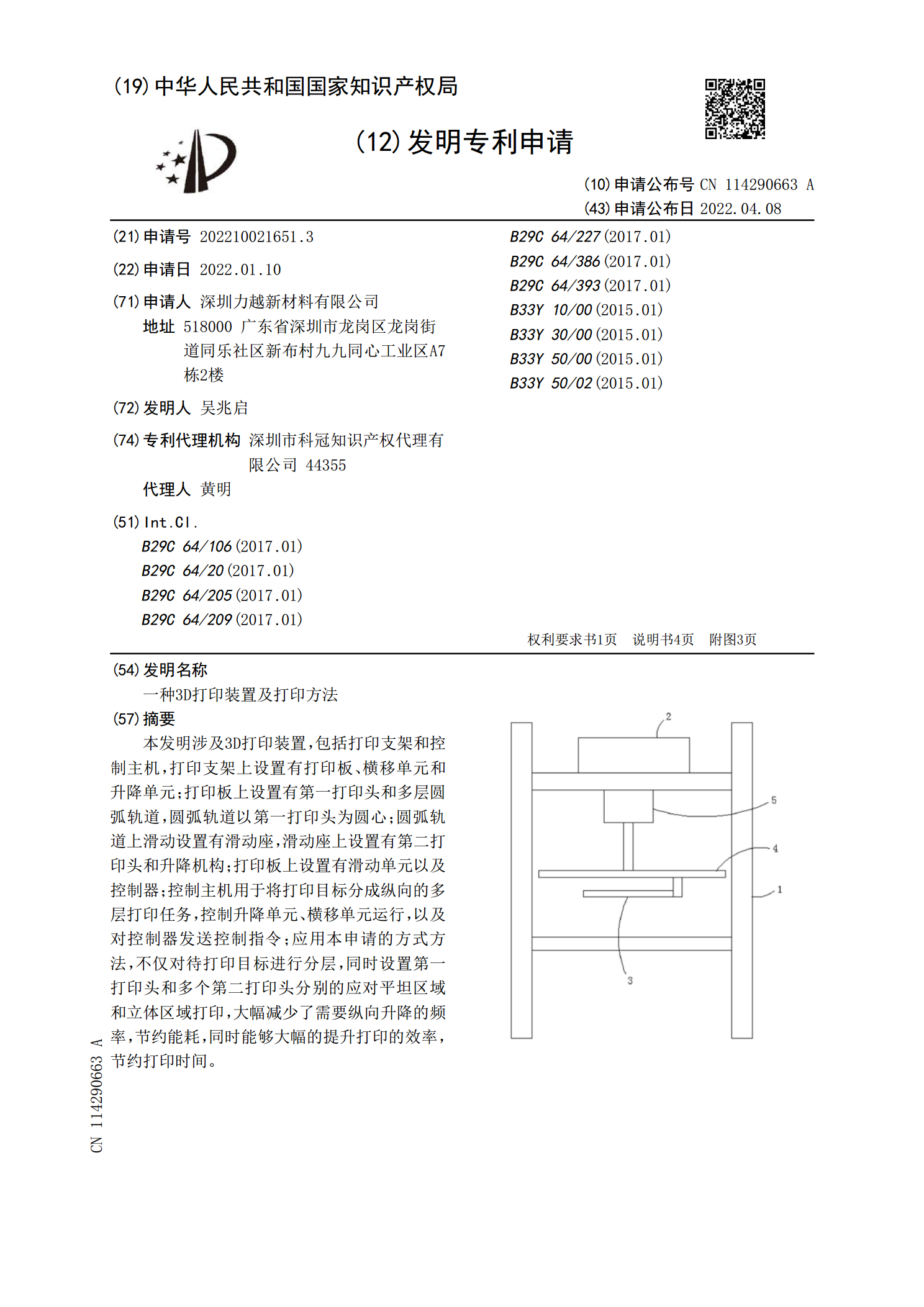
本发明涉及3D打印装置,包括打印支架和控制主机,打印支架上设置有打印板、横移单元和升降单元;打印板上设置有第一打印头和多层圆弧轨道,圆弧轨道以第一打印头为圆心;圆弧轨道上滑动设置有滑动座,滑动座上设置有第二打印头和升降机构;打印板上设置有滑动单元以及控制器;控制主机用于将打印目标分成纵向的多层打印任务,控制升降单元、横移单元运行,以及对控制器发送控制指令;应用本申请的方式方法,不仅对待打印目标进行分层,同时设置第一打印头和多个第二打印头分别的应对平坦区域和立体区域打印,大幅减少了需要纵向升降的频率,节约能

一种3D打印装置及方法.pdf
本发明公开了一种3D打印装置及方法,该装置包括喷头、用于放置成形基底的成形工作台以及接收电极,喷头包括同步移动的激光通路模块和至少一个静电纺丝模块,激光通路模块的出口轴线与静电纺丝模块的出口轴线交汇于一点,静电纺丝模块与接收电极分别连接直流电源的正负极,成形工作台设置在喷头和接收电极之间,静电纺丝模块在电场力的作用下产生向成形工作台射出的高分子颗粒的射流,射流材料被激光通路模块发射的激光束熔化以熔融状态落在成形基板的特定位置上并沉积成层,通过控制喷头按照预定轮廓进行多层沉积而形成三维的高分子材料制件。本发

一种3D打印装置与方法.pdf
本发明公开了一种3D打印装置,3D打印装置包括:树脂槽、打印平台和光源系统,所述树脂槽的底面为硬质透明板,所述硬质透明板上设有透明的凝胶层,所述打印平台位于树脂槽上部,所述光源系统的光源设置在硬质透明板下部,所述凝胶层为含硅油或者氟油的凝胶层。本发明还提供了一种3D打印方法。本发明提供的3D打印装置与方法能显著降低离型时的拉拔力,同时又能兼容市面上常规所有光敏树脂。

一种3D打印机防流料装置和打印方法.pdf
本发明属于打印设备及控制技术领域,公开了一种3D打印机防流料装置和打印方法,系统控制模块打印底板下降到系统默认的Z轴位置,由指定工作喷头上的红外线测距装置检测打印喷头距离打印底板高度值,由数据读取分析模块将该高度值和设定的该层切片层高作对比分析高度差值后,喷头高度调整模块控制步进电机带动凸轮转动,使对应拨叉旋转一定角度,实现喷嘴的高度补偿。本发明由系统控制模块控制工作喷头在指定位置打印一层检测试样,然后工作喷头移动到产品打印位置,开始打印产品;本发明中双喷头自动调整喷头距离打印底板的高度,能实现不同材料混