
基于自适应角约束的空地红外时敏弱小移动目标检测方法.pdf

英瑞****写意

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于自适应角约束的空地红外时敏弱小移动目标检测方法.pdf
本发明公开了一种基于自适应角约束的空地红外时敏弱小移动目标检测方法,利用多尺度局部差异度量算法消除背景杂波干扰,有效分割出候选目标点;利用核相关滤波算法对候选目标点进行跟踪,建立首帧和末帧的候选目标点集对;利用背景候选目标点的角度约束不变性,构建首末帧的角约束矩阵;计算候选目标点的角度变化偏差,并利用阈值分割检测移动目标,消除背景目标。本发明解决了如何提高空地复杂动态背景下的红外弱小移动目标的检测效果。

基于自适应改进的压缩域红外弱小目标检测.docx
基于自适应改进的压缩域红外弱小目标检测摘要:本文提出了一种基于自适应改进的压缩域红外弱小目标检测方法。该方法首先采用小波变换将红外图像转换到压缩域,然后通过图像增强和自适应阈值分割方法实现弱小目标的提取。在提取过程中,我们采用了自适应改进的方法来优化算法,提高了目标检测的精度和鲁棒性。实验结果表明,该方法在不同场景下均能有效地检测出弱小目标。关键词:压缩域,红外图像,弱小目标检测,小波变换,自适应阈值分割,优化算法。一、绪论弱小目标检测是红外图像处理领域中一个重要的研究方向。在许多实际应用中,如目标识别、
基于红外特性及空时显著性的红外弱小目标检测方法.pdf
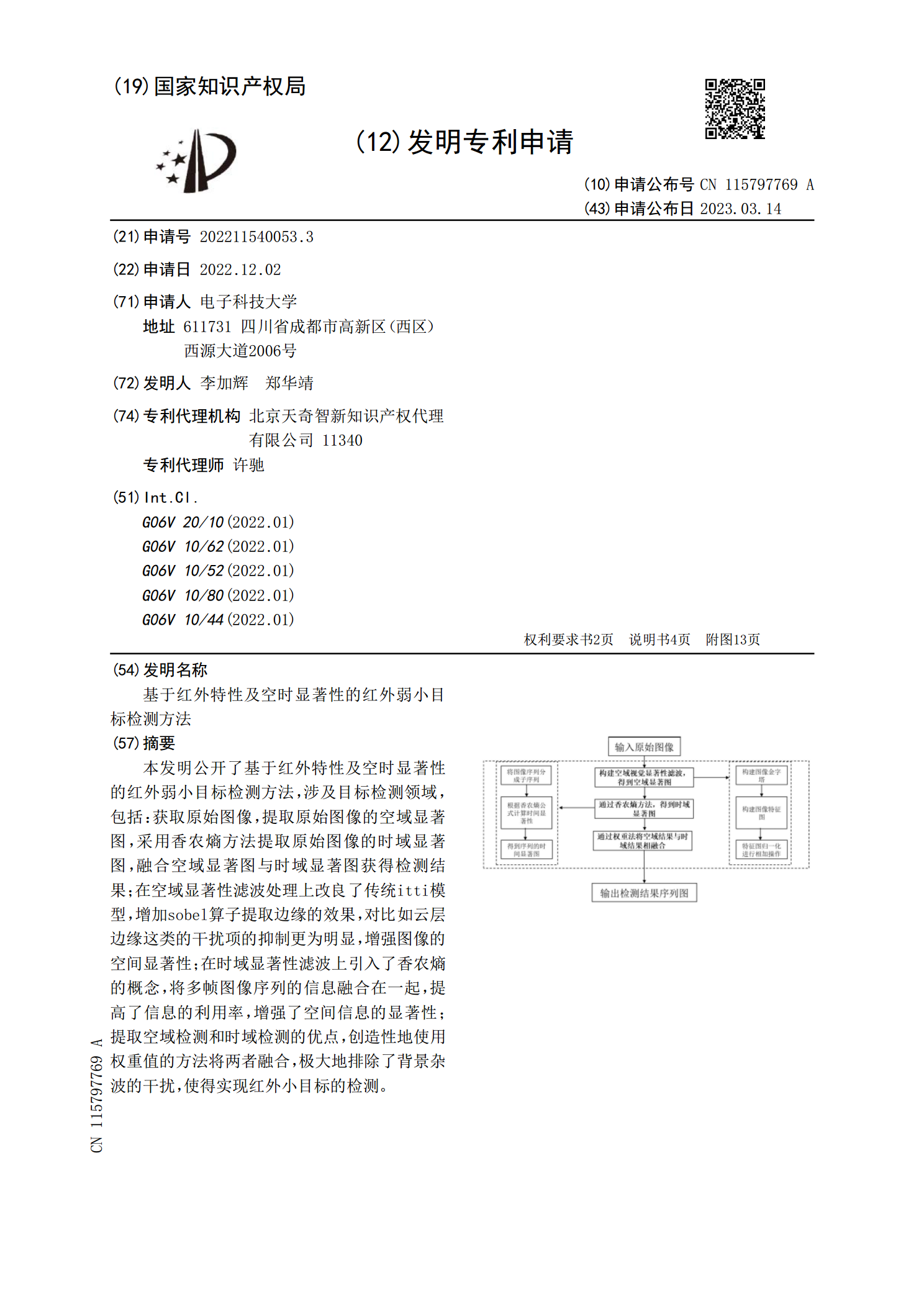
本发明公开了基于红外特性及空时显著性的红外弱小目标检测方法,涉及目标检测领域,包括:获取原始图像,提取原始图像的空域显著图,采用香农熵方法提取原始图像的时域显著图,融合空域显著图与时域显著图获得检测结果;在空域显著性滤波处理上改良了传统itti模型,增加sobel算子提取边缘的效果,对比如云层边缘这类的干扰项的抑制更为明显,增强图像的空间显著性;在时域显著性滤波上引入了香农熵的概念,将多帧图像序列的信息融合在一起,提高了信息的利用率,增强了空间信息的显著性;提取空域检测和时域检测的优点,创造性地使用权重值

基于DSP的自适应弱小目标检测方法.docx
基于DSP的自适应弱小目标检测方法标题:基于DSP的自适应弱小目标检测方法摘要:随着科技的不断进步和社会的发展,对于自适应弱小目标的检测需求与日俱增。为了提高目标检测的准确性和鲁棒性,本论文提出了一种基于DSP的自适应弱小目标检测方法。该方法利用DSP(数字信号处理器)的高性能计算能力和并行计算架构,结合现代计算机视觉技术,实现对弱小目标的自适应检测。通过实验结果的验证,本方法在提高目标检测的准确性和鲁棒性方面表现出良好的性能。关键词:自适应目标检测;弱小目标;DSP;计算机视觉1.引言随着科技的进步和社

基于多特征融合的红外弱小目标检测方法.pdf
本发明提出了基于多特征融合的红外弱小目标检测方法,先基于红外弱小目标局部灰度值大的特性,利用目标与邻域背景的灰度对比度对真实目标进行增强、部分复杂背景进行抑制。其次,利用红外弱小目标自身灰度信息符合二维高斯分布的特性,通过计算红外弱小目标边缘像素点与中心像素点之间的距离和灰度差的协方差来检测目标,得到显着图一。再次,利用红外弱小目标与邻域相似度低的特性,通过计算相似性因子来检测目标,得到显着图二。最后,将显着图一与显着图二进行点乘,通过融合红外弱小目标多种特性得到最终显着图,对最终显着图计算简单阈值进行分