
基于红外图像的海面舰船检测方法.pdf

一条****丹淑

1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于红外图像的海面舰船检测方法.pdf
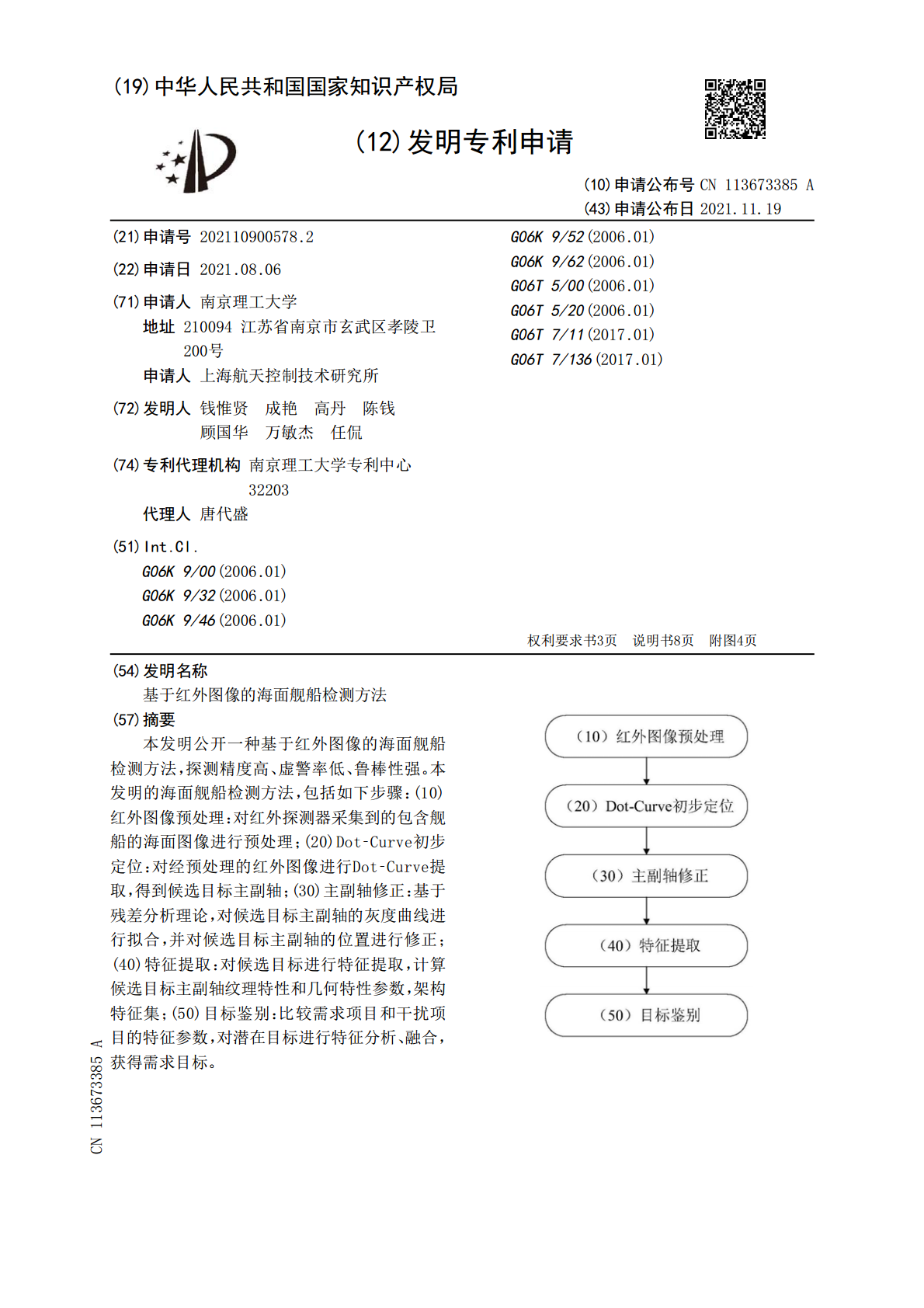
本发明公开一种基于红外图像的海面舰船检测方法,探测精度高、虚警率低、鲁棒性强。本发明的海面舰船检测方法,包括如下步骤:(10)红外图像预处理:对红外探测器采集到的包含舰船的海面图像进行预处理;(20)Dot‑Curve初步定位:对经预处理的红外图像进行Dot‑Curve提取,得到候选目标主副轴;(30)主副轴修正:基于残差分析理论,对候选目标主副轴的灰度曲线进行拟合,并对候选目标主副轴的位置进行修正;(40)特征提取:对候选目标进行特征提取,计算候选目标主副轴纹理特性和几何特性参数,架构特征集;(50)目
基于视觉注意机制和信息熵的遥感图像海面舰船检测方法.pdf
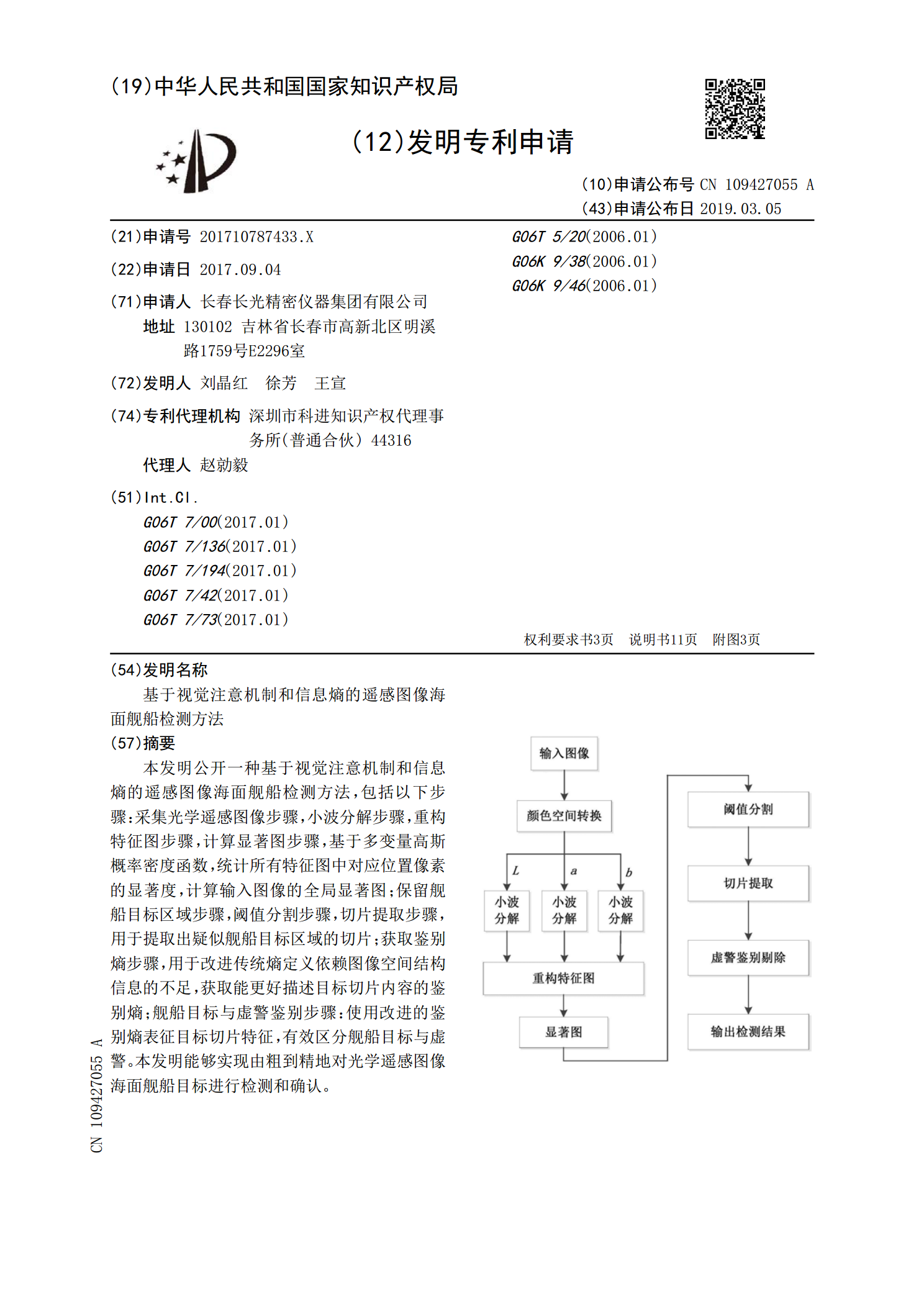
本发明公开一种基于视觉注意机制和信息熵的遥感图像海面舰船检测方法,包括以下步骤:采集光学遥感图像步骤,小波分解步骤,重构特征图步骤,计算显著图步骤,基于多变量高斯概率密度函数,统计所有特征图中对应位置像素的显著度,计算输入图像的全局显著图;保留舰船目标区域步骤,阈值分割步骤,切片提取步骤,用于提取出疑似舰船目标区域的切片;获取鉴别熵步骤,用于改进传统熵定义依赖图像空间结构信息的不足,获取能更好描述目标切片内容的鉴别熵;舰船目标与虚警鉴别步骤:使用改进的鉴别熵表征目标切片特征,有效区分舰船目标与虚警。本发明

海面舰船目标的红外图像仿真研究的开题报告.docx
海面舰船目标的红外图像仿真研究的开题报告开题报告:海面舰船目标的红外图像仿真研究一、研究背景和意义海洋是人类生存和发展不可或缺的重要地方,也是富含自然资源的重要领域。中国不仅是一个海洋大国,同时也是一个陆地大国,拥有广阔的海域和亿万人口。如何加强对我国海域的科学研究和保护已经成为我们必须面对的挑战。海面舰船目标的红外图像研究是对海上安全的必要研究,随着红外技术的不断进步和发展,海面舰船目标的红外图像仿真研究变得越来越重要。本研究的意义在于深入掌握海面舰船的红外辐射特性,并利用现代计算机技术进行仿真设计,通

基于可见光与红外图像融合的舰船目标检测方法.pdf
本发明公开了一种基于可见光与红外图像融合的舰船目标检测方法,包括:获取多组相互对应且包含舰船目标的可见光图像和红外图像;对可见光图像和红外图像中的舰船目标进行标注,获取标签,生成舰船目标训练数据集,舰船目标训练数据集中的每个训练数据包括相互对应的一个可见光图像和一个红外图像、及其对应的标签;构建目标检测网络;利用舰船目标训练数据集训练目标检测网络;利用训练后的目标检测网络进行舰船目标检测。本发明的基于可见光与红外图像融合的舰船目标检测方法能够同时提取可见光图像与红外图像的图像特征以保留更多目标信息,实现空

基于显著区域提取的红外图像舰船目标检测.docx
基于显著区域提取的红外图像舰船目标检测基于显著区域提取的红外图像舰船目标检测摘要:红外图像在舰船目标检测中具有重要的应用价值。然而,由于红外图像的特殊性质,包括低对比度、噪声、模糊等,使得传统的目标检测方法无法直接应用于红外图像。为了解决这个问题,本论文提出了一种基于显著区域提取的红外图像舰船目标检测方法。首先,利用显著区域提取算法,将红外图像中的舰船目标从背景中分离出来;然后,通过几何形状和纹理特征的提取,对目标进行进一步的特征表示;最后,利用支持向量机分类器对舰船目标进行分类和检测。实验结果表明,所提