
补偿方法、装置及存储介质.pdf

书生****写意

1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

补偿方法、装置及存储介质.pdf
本发明公开了一种补偿方法、装置及存储介质。其中,该方法包括:在目标电机启动后,获得编码器补偿值以及待补偿编码值,编码器补偿值是通过目标电机的往复运动确定的;基于编码器补偿值以及待补偿编码值确定针对目标电机的目标编码值。本发明解决了现有技术中磁编码器由于误差的影响,存在周期性偏差的技术问题。

显示补偿方法、装置、显示装置及存储介质.pdf
本申请公开了一种显示补偿方法、装置、显示装置及存储介质,属于显示技术领域。该方法应用于显示装置,显示装置具有第一显示区和第二显示区,第一显示区的透光率大于第二显示区的透光率,该方法包括:获取显示补偿调节输入产生的与目标区域对应的图层显示补偿参数,目标区域包括第一显示区或第二显示区;根据图层显示补偿参数生成目标区域的目标显示图层;将目标显示图层与目标区域的原图层叠加,显示目标区域的图像,使目标区域的显示效果与显示装置除目标区域以外的显示区域的显示效果近似或一致。根据本申请实施例能够提高显示装置的显示效果。

线损补偿方法、装置、设备及存储介质.pdf
本申请涉及一种线损补偿方法、装置、设备及存储介质,应用于电力技术的技术领域,其方法包括:获取电网的发电量和用电设备的用电量;基于所述发电量和用电量计算第一线损电压值;基于所述第一线损电压值确定线损调整精度;基于所述调整精度对线损进行补偿。本申请具有使工业电源在规定范围的电压工作,延长工作电源的使用寿命的效果。
显示面板的补偿方法、装置、设备及存储介质.pdf
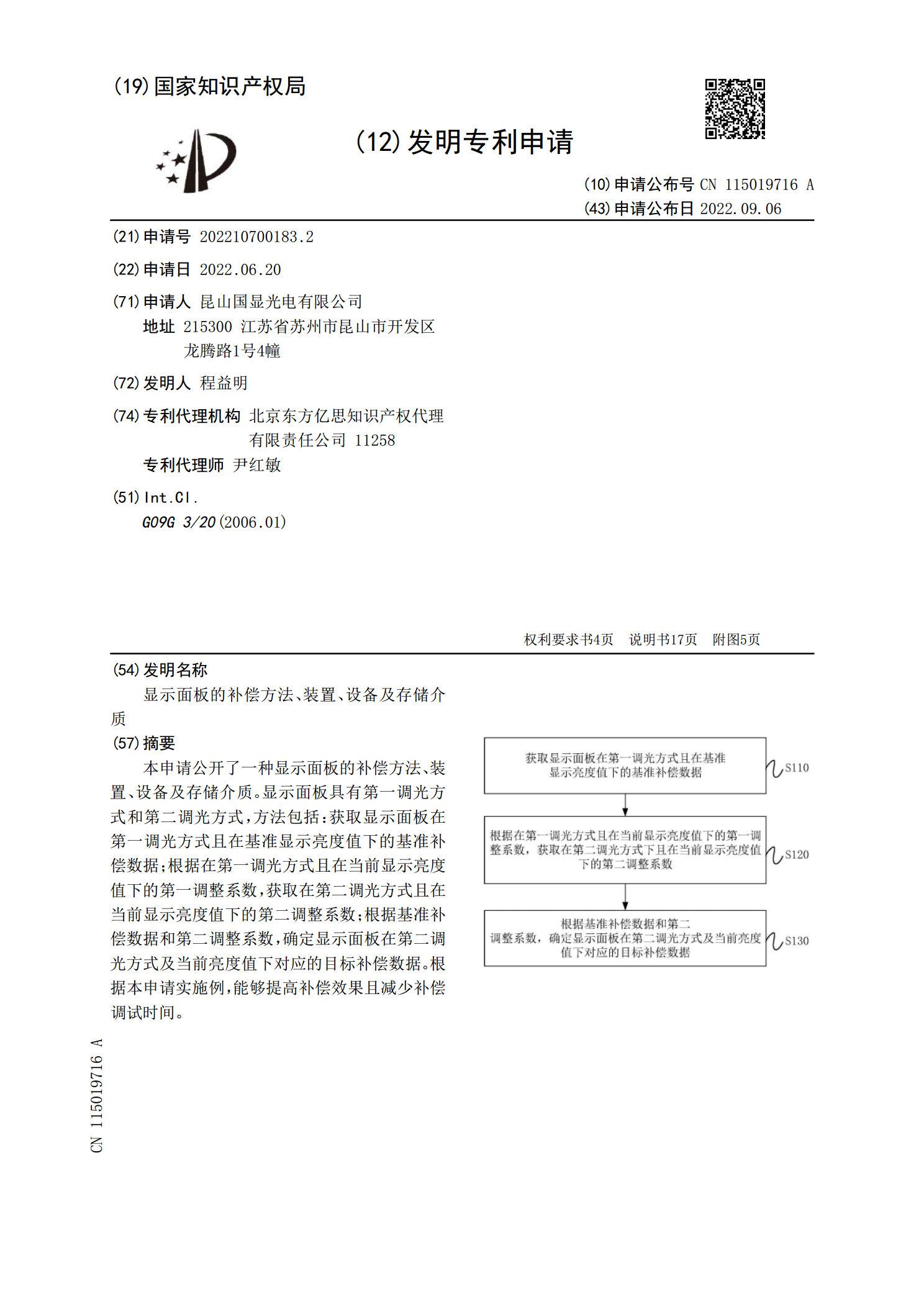
本申请公开了一种显示面板的补偿方法、装置、设备及存储介质。显示面板具有第一调光方式和第二调光方式,方法包括:获取显示面板在第一调光方式且在基准显示亮度值下的基准补偿数据;根据在第一调光方式且在当前显示亮度值下的第一调整系数,获取在第二调光方式且在当前显示亮度值下的第二调整系数;根据基准补偿数据和第二调整系数,确定显示面板在第二调光方式及当前亮度值下对应的目标补偿数据。根据本申请实施例,能够提高补偿效果且减少补偿调试时间。
视频颜色滤光补偿方法、装置和存储介质.pdf
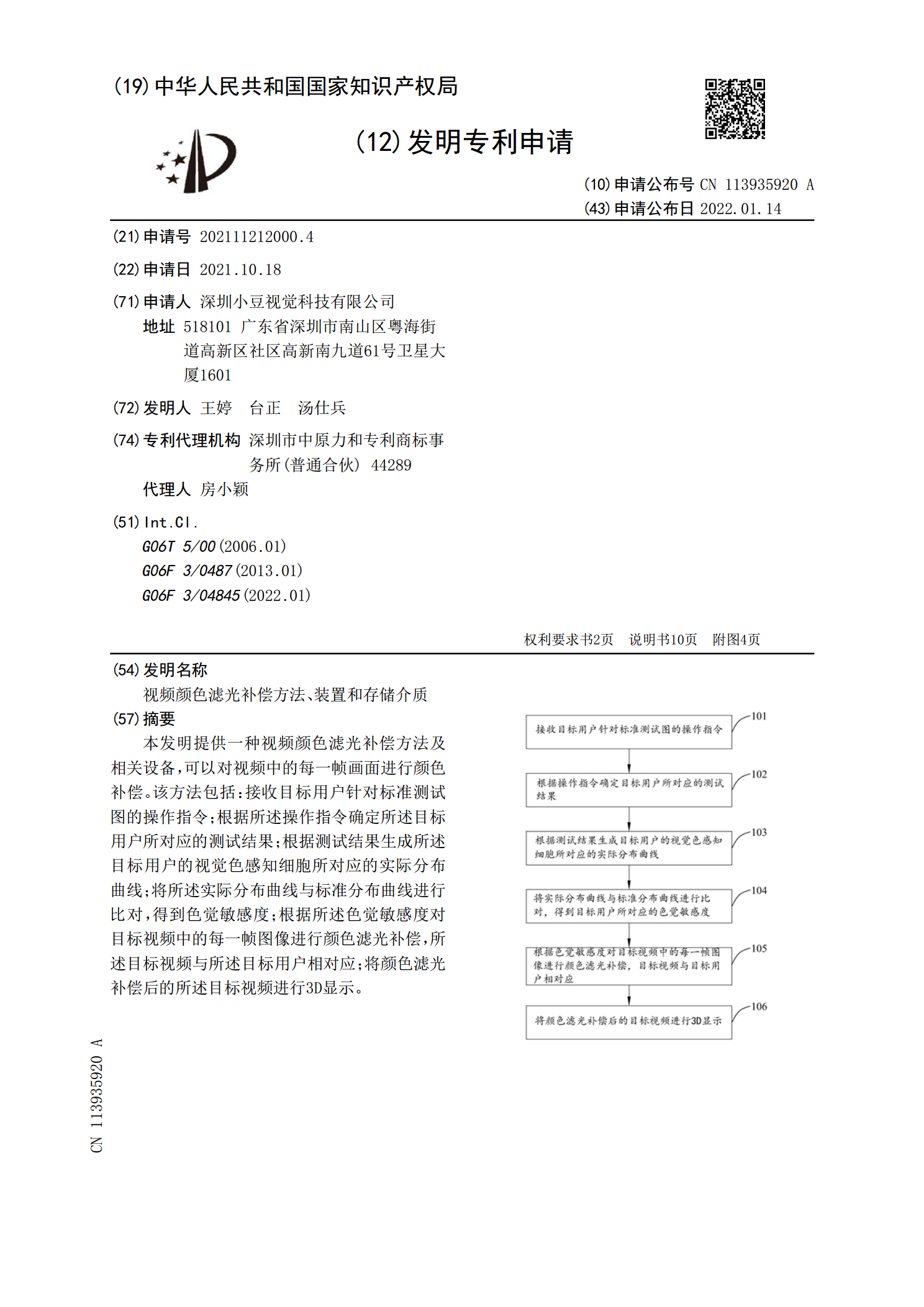
本发明提供一种视频颜色滤光补偿方法及相关设备,可以对视频中的每一帧画面进行颜色补偿。该方法包括:接收目标用户针对标准测试图的操作指令;根据所述操作指令确定所述目标用户所对应的测试结果;根据测试结果生成所述目标用户的视觉色感知细胞所对应的实际分布曲线;将所述实际分布曲线与标准分布曲线进行比对,得到色觉敏感度;根据所述色觉敏感度对目标视频中的每一帧图像进行颜色滤光补偿,所述目标视频与所述目标用户相对应;将颜色滤光补偿后的所述目标视频进行3D显示。