
一种基于拓扑结构与多尺度特征的点云配准方法.pdf

雨巷****莺莺


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于拓扑结构与多尺度特征的点云配准方法.pdf
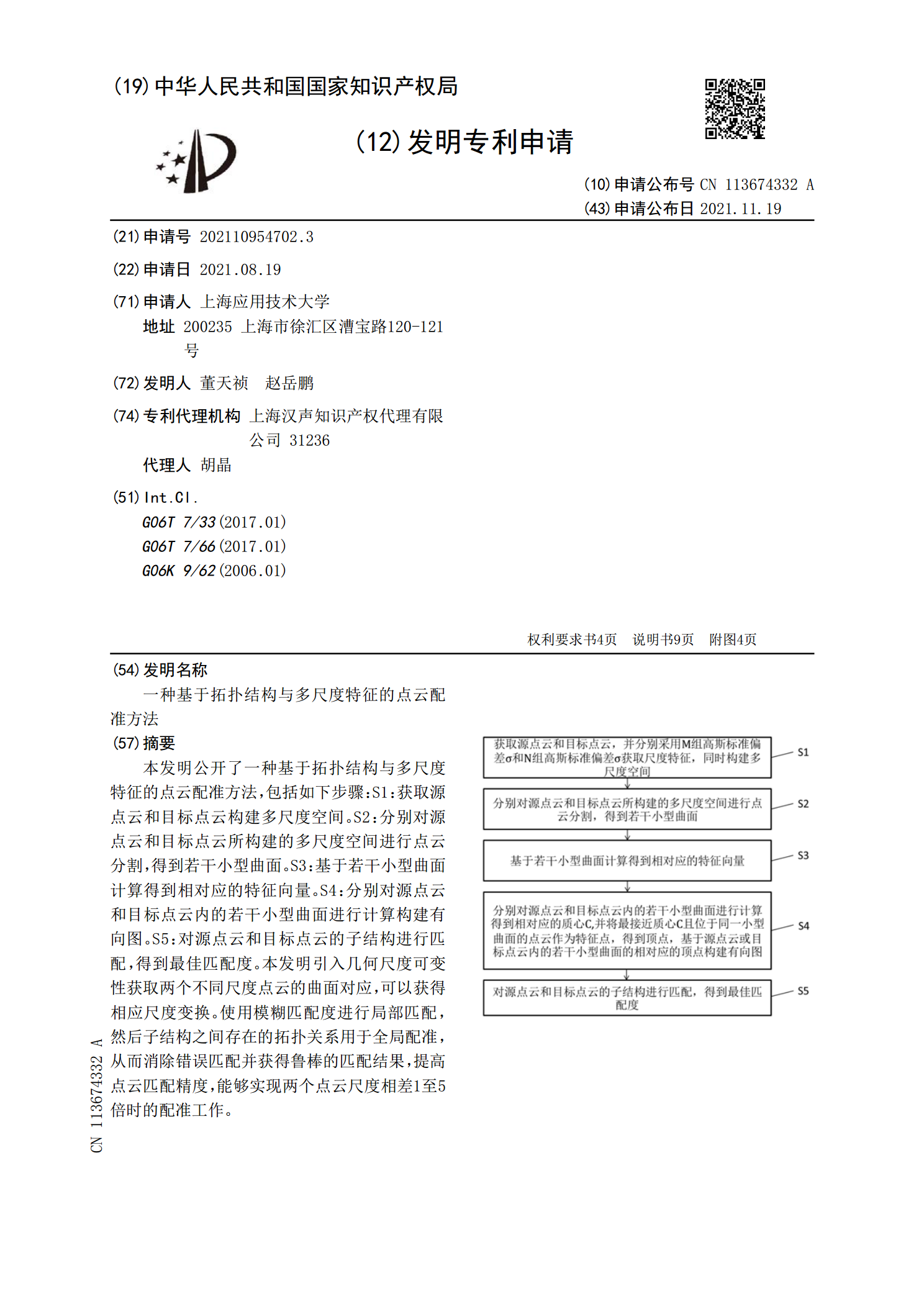
本发明公开了一种基于拓扑结构与多尺度特征的点云配准方法,包括如下步骤:S1:获取源点云和目标点云构建多尺度空间。S2:分别对源点云和目标点云所构建的多尺度空间进行点云分割,得到若干小型曲面。S3:基于若干小型曲面计算得到相对应的特征向量。S4:分别对源点云和目标点云内的若干小型曲面进行计算构建有向图。S5:对源点云和目标点云的子结构进行匹配,得到最佳匹配度。本发明引入几何尺度可变性获取两个不同尺度点云的曲面对应,可以获得相应尺度变换。使用模糊匹配度进行局部匹配,然后子结构之间存在的拓扑关系用于全局配准,从

基于多尺度特征动态融合的点云配准算法.docx
基于多尺度特征动态融合的点云配准算法目录一、内容描述................................................21.1背景介绍.............................................21.2研究目的与意义.......................................31.3研究方法与流程.......................................4二、相关工作.....................

基于体素格尺度不变特征变换的快速点云配准方法.docx
基于体素格尺度不变特征变换的快速点云配准方法基于体素格尺度不变特征变换(VoxelScaleInvariantFeatureTransform,Voxel-SIFT)的快速点云配准方法摘要:点云配准是计算机视觉领域中的一个重要问题,广泛应用于三维重建、机器人导航、虚拟现实等领域。本文提出了一种基于体素格尺度不变特征变换(Voxel-SIFT)的快速点云配准方法。该方法在提取点云特征时利用了体素格,并结合尺度不变特征变换(SIFT)算法,实现了快速而准确的点云配准。实验结果表明,本文方法能够高效地处理大规模

一种基于多尺度特征的热红外图像配准方法.pdf
本发明涉及一种基于多尺度特征的热红外图像配准方法,实现步骤如下:(1)以多光谱图像为参考图像,热红外图像作为待配准图像,对参考图像和待配准图像分别进行小波分解,分解后图像的分辨率与未分解前的多光谱图像和热红外图像相同;(2)计算步骤(1)中分解后图像中所有分解层的直方图,只有灰度值属于前5%的多光谱图像和热红外图像特征点才被保留,这些特征点代表了配准过程中要使用的点;(3)对步骤(2)中的特征点进行相关计算,寻找匹配点,从而完成热红外图像。本发明将图像分解成不同尺度、不同方向的图像系列,具有特征可选的优点

基于特征点的曲面点云配准方法.docx
基于特征点的曲面点云配准方法基于特征点的曲面点云配准方法摘要:点云配准是计算机视觉和三维重建领域的核心任务之一。然而,由于噪声、遮挡和刚性变形等问题,点云配准仍然是一个具有挑战性的任务。本文提出了一种基于特征点的曲面点云配准方法,该方法可以在处理复杂点云场景时提供高精度和鲁棒性。关键词:点云配准,特征点,曲面,鲁棒性,高精度1.引言点云是表示三维空间中对象的一种重要形式。点云配准是将多个点云数据集对齐以获得一个统一的坐标系的过程。在计算机视觉和三维重建领域,点云配准被广泛应用于目标检测、姿态估计、三维建模