
一种电机控制方法、装置及电机控制器.pdf

增梅****主啊


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种电机控制方法、装置及电机控制器.pdf
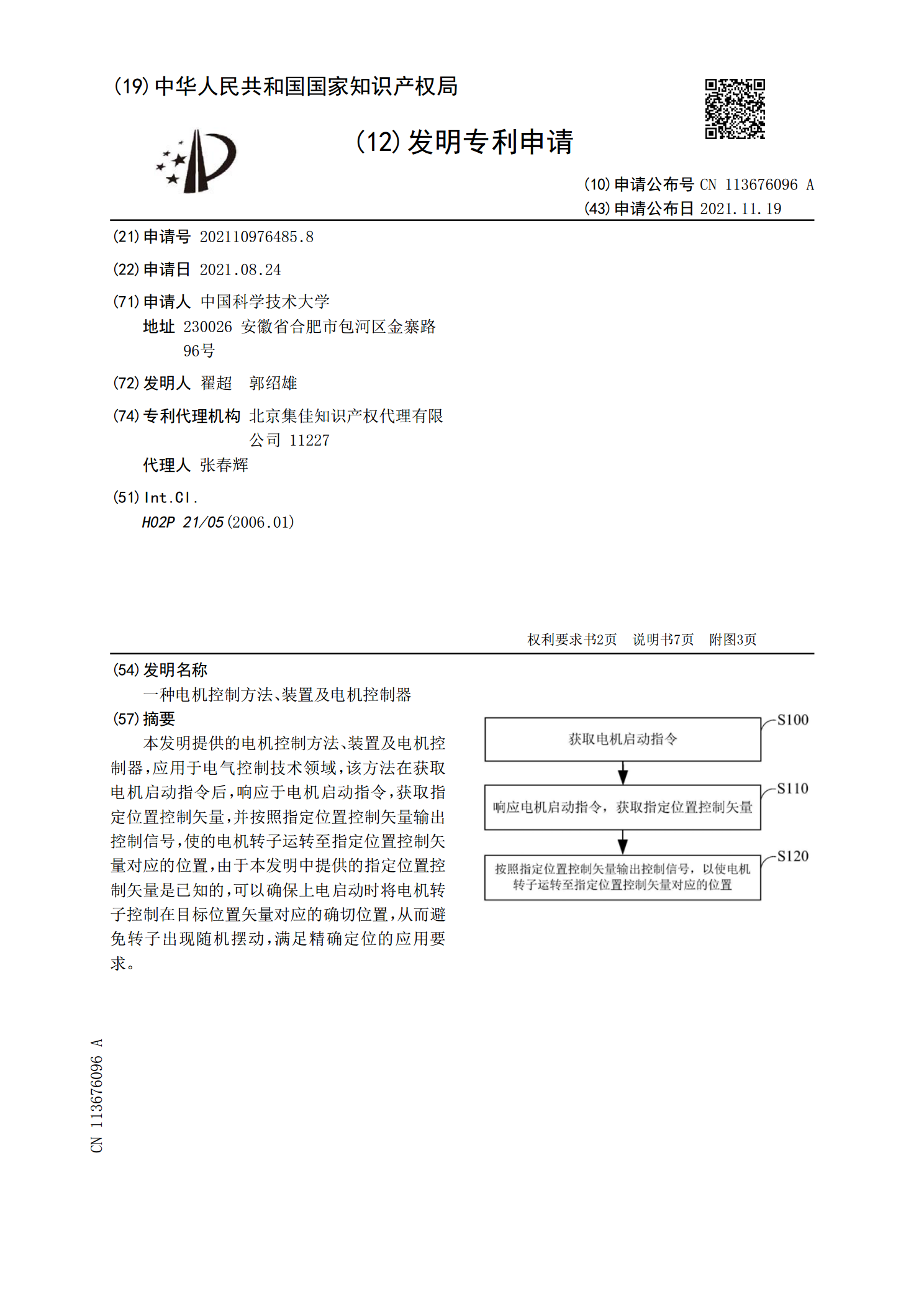
本发明提供的电机控制方法、装置及电机控制器,应用于电气控制技术领域,该方法在获取电机启动指令后,响应于电机启动指令,获取指定位置控制矢量,并按照指定位置控制矢量输出控制信号,使的电机转子运转至指定位置控制矢量对应的位置,由于本发明中提供的指定位置控制矢量是已知的,可以确保上电启动时将电机转子控制在目标位置矢量对应的确切位置,从而避免转子出现随机摆动,满足精确定位的应用要求。
电机控制器、电机及其控制方法.pdf
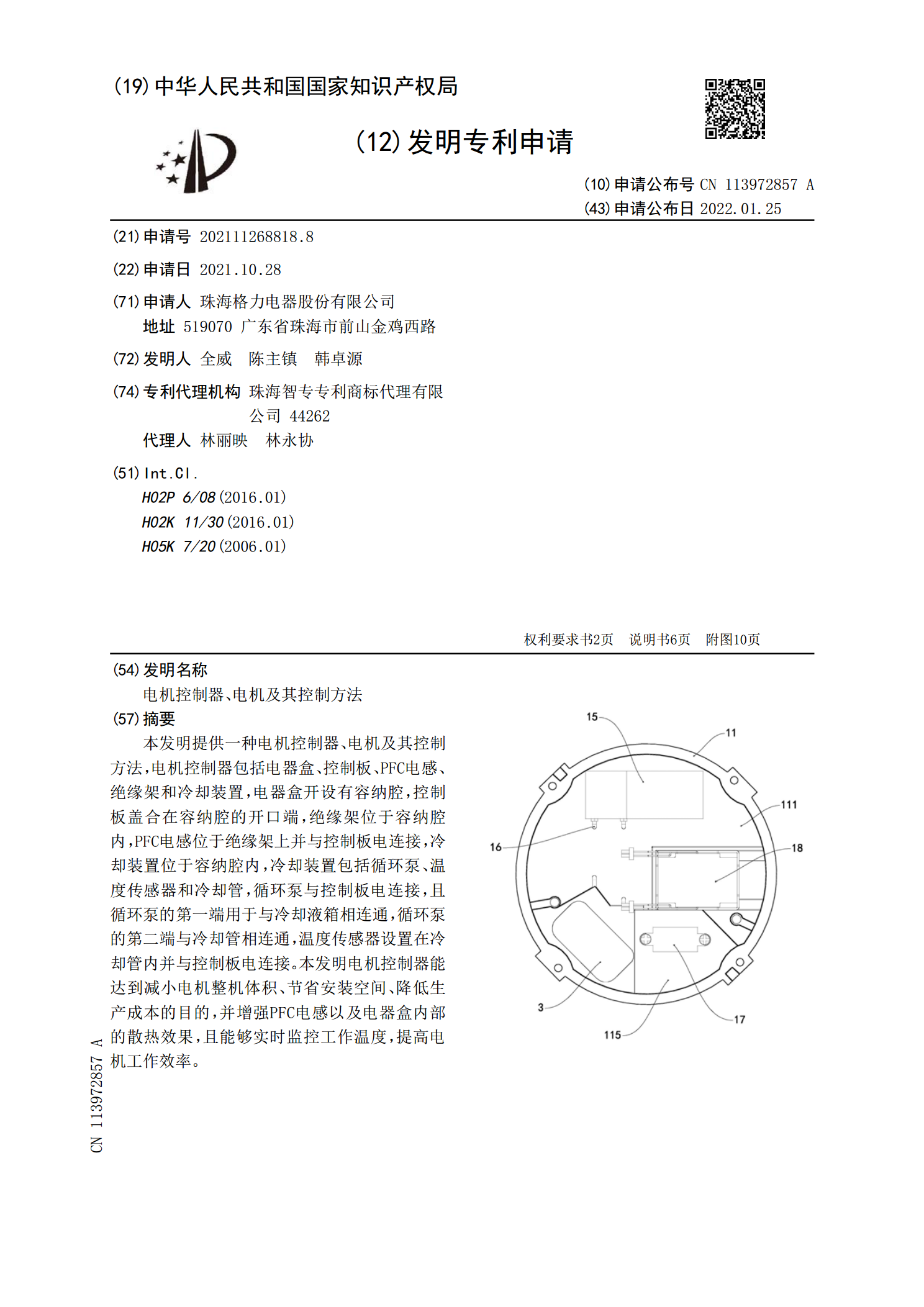
本发明提供一种电机控制器、电机及其控制方法,电机控制器包括电器盒、控制板、PFC电感、绝缘架和冷却装置,电器盒开设有容纳腔,控制板盖合在容纳腔的开口端,绝缘架位于容纳腔内,PFC电感位于绝缘架上并与控制板电连接,冷却装置位于容纳腔内,冷却装置包括循环泵、温度传感器和冷却管,循环泵与控制板电连接,且循环泵的第一端用于与冷却液箱相连通,循环泵的第二端与冷却管相连通,温度传感器设置在冷却管内并与控制板电连接。本发明电机控制器能达到减小电机整机体积、节省安装空间、降低生产成本的目的,并增强PFC电感以及电器盒内部

电机极对数检测方法、检测装置以及电机控制器.pdf
本发明提出一种电机极对数检测方法、检测装置以及电机控制器,该方法包括:获取参考电机的参考带负载能力;以预设的电机转速控制目标电机运行,获取目标电机当前的实际带负载能力;以及,根据实际带负载能力、参考带负载能力、及参考电机的参数,计算目标电机的极对数。该方法在不增加硬件成本的前提下,通过利用参考电机的参数、预设的电机转速计算目标电机的极对数,从而根据极对数实现对目标电机型号的识别,在保证识别结果可靠、准确的基础上,降低了识别的成本和占用资源。

一种电机、电机控制装置及控制方法.pdf
本申请涉及一种电机、电机控制装置及控制方法。其中,电机包括:第一继电器的非选择端a1与电机的第一相绕组的U2端连接,第一继电器的选择端b1与电机的第二相绕组的V1端连接,第一继电器的选择端c1与电机的第二相绕组的V2端连接;第二继电器的非选择端a2与电机的第二相绕组的V2端连接,第二继电器的选择端b2与电机的第三相绕组的W1端连接,第二继电器的选择端c2与电机的第三相绕组的W2端连接;第三继电器的非选择端a3与电机的第三相绕组的W2端连接,第三继电器的选择端b3与电机的第一相绕组的U1端连接,第三继电器

电机电感检测方法、装置以及电机控制器、存储介质.pdf
本发明提出一种电机电感检测方法、装置以及电机控制器、存储介质,其中,方法包括:以预设的直轴电流及交轴电流驱动目标电机运行;在第一预设时间间隔后,向直轴电流注入第一扰动信号,并获取第一电流幅值;在第二预设的时间间隔后,向交轴电流注入第二扰动信号,并获取第二电流幅值;在第三预设的时间间隔后,向目标电机的驱动电路中注入第三扰动信号,并获取第三电流幅值;根据第一电流幅值、第二电流幅值、第三电流幅值及第三扰动信号的幅值和频率,计算目标电机的增量电感。该方法在目标电机驱动电路的三个不同位置分别注入扰动信号,通过扰动信