
一种基于数字孪生的最优轨迹生成方法及系统.pdf

一吃****继勇


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于数字孪生的最优轨迹生成方法及系统.pdf
本发明公开了一种基于数字孪生的最优轨迹生成方法及系统,系统包括:数据传输接口、数据交互接口、轨迹规划模块和数字映射模块;所述轨迹规划模块包括:规划器组件和机器人物理模型组件;所述数字映射模块包括:环境模型和代理模型;轨迹规划模块的主要功能是根据规划任务生成对应的最优控制问题,并通过数值算法求解该问题;数字映射模块的主要功能之一是快速生成无碰撞且满足机器人动力学约束的控制量轨迹和状态量轨迹;功能之二是快速实现目标轨迹的偏差评估与碰撞检测。有益效果是:能够在提高工作精度、效率的同时兼顾能耗;能够应用于运动速度

一种基于动态轨迹流的场景流数字孪生方法及系统.pdf
本发明公开了一种基于动态轨迹流的场景流数字孪生方法及系统,首先提出一种检测跟踪一体化多模态融合感知增强网络,在大幅度提高网络处理速度的同时,实现目标语义轨迹的精准提取与辨识;并提出一种结合道路布局与交通力耦合关系的目标轨迹预测方法,建模场景中语义的时序演变规律,实现交通运行环境中的目标轨迹预测;基于轨迹提取和语义辨识以及预测的运动轨迹,对中观层面交通态势的时序演变规律建模,获取基于真实目标动态轨迹流的场景流数字孪生。本发明能够有效实现目标语义轨迹的精准提取与辨识,同时可视化场景流数字孪生,为精准化交通管控

一种数字孪生湖泊的生成方法及系统.pdf
本发明提供一种数字孪生湖泊的生成方法及系统,包括:对湖泊遥感图像进行湖泊边界提取得到初始图像;对初始图像进行预处理得到黑白图像;对黑白边界中的各像素点按照像素坐标进行排序,并根据排序结果将各像素点作为矢量点连接形成闭合矢量曲线;于闭合矢量曲线围合区域中插入多个新的矢量点,并将所有矢量点对应连线形成网格平面;根据待生成湖泊的最深处的第一水深、第一经纬度以及除最深处的多个任意位置的第二水深、第二经纬度和网格平面中各连线关联的预设的张量,对网格平面中的各矢量点配置的初始向下的法向量进行迭代处理,以生成待生成湖泊
一种基于数字孪生的综合能源控制方法及系统.pdf
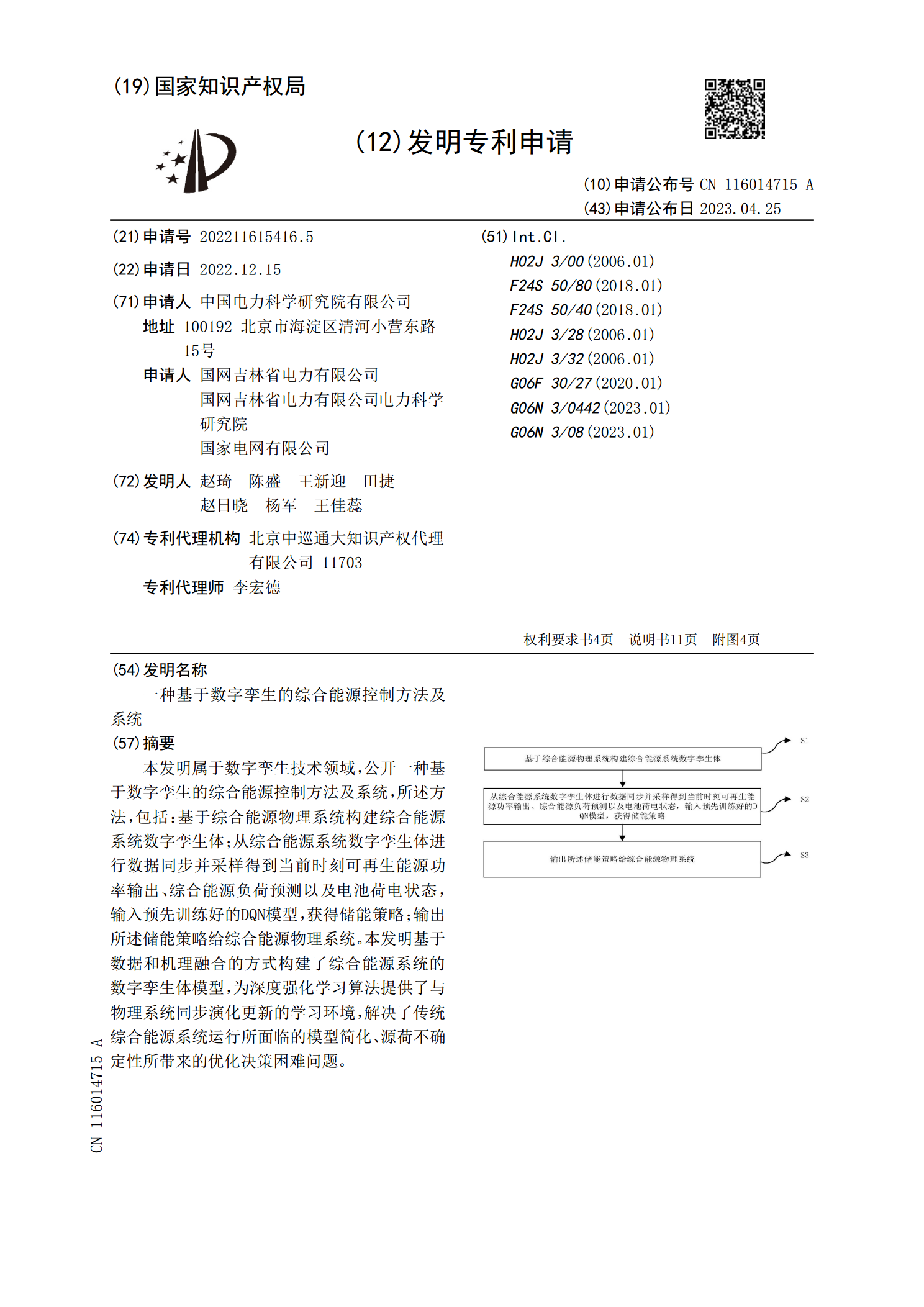
本发明属于数字孪生技术领域,公开一种基于数字孪生的综合能源控制方法及系统,所述方法,包括:基于综合能源物理系统构建综合能源系统数字孪生体;从综合能源系统数字孪生体进行数据同步并采样得到当前时刻可再生能源功率输出、综合能源负荷预测以及电池荷电状态,输入预先训练好的DQN模型,获得储能策略;输出所述储能策略给综合能源物理系统。本发明基于数据和机理融合的方式构建了综合能源系统的数字孪生体模型,为深度强化学习算法提供了与物理系统同步演化更新的学习环境,解决了传统综合能源系统运行所面临的模型简化、源荷不确定性所带来
一种基于数字孪生的应急警力调度方法及系统.pdf
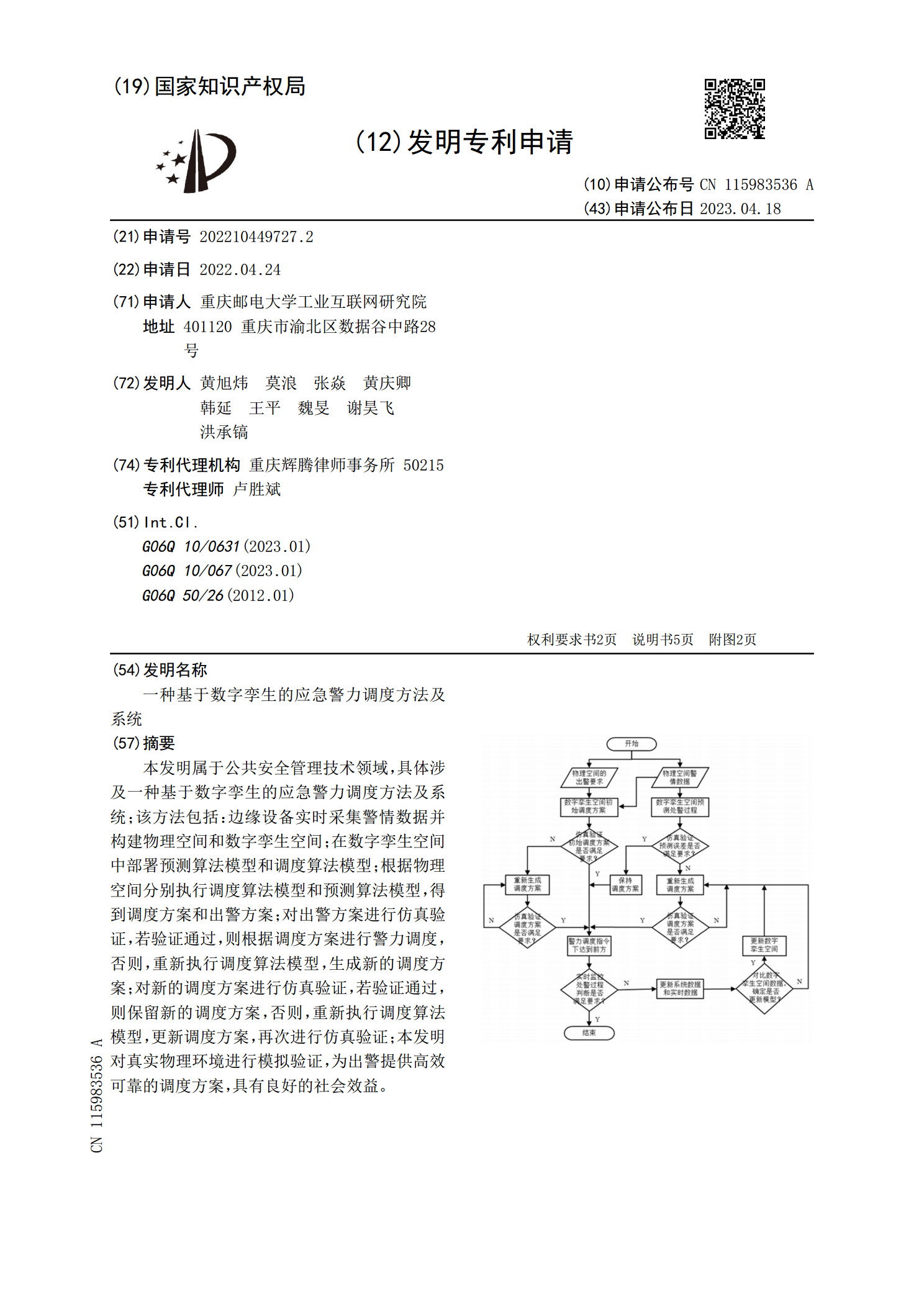
本发明属于公共安全管理技术领域,具体涉及一种基于数字孪生的应急警力调度方法及系统;该方法包括:边缘设备实时采集警情数据并构建物理空间和数字孪生空间;在数字孪生空间中部署预测算法模型和调度算法模型;根据物理空间分别执行调度算法模型和预测算法模型,得到调度方案和出警方案;对出警方案进行仿真验证,若验证通过,则根据调度方案进行警力调度,否则,重新执行调度算法模型,生成新的调度方案;对新的调度方案进行仿真验证,若验证通过,则保留新的调度方案,否则,重新执行调度算法模型,更新调度方案,再次进行仿真验证;本发明对真实