
一种基于三维激光扫描技术的地下目标特征快速提取方法.pdf

邻家****66


1/6

2/6
3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于三维激光扫描技术的地下目标特征快速提取方法.pdf
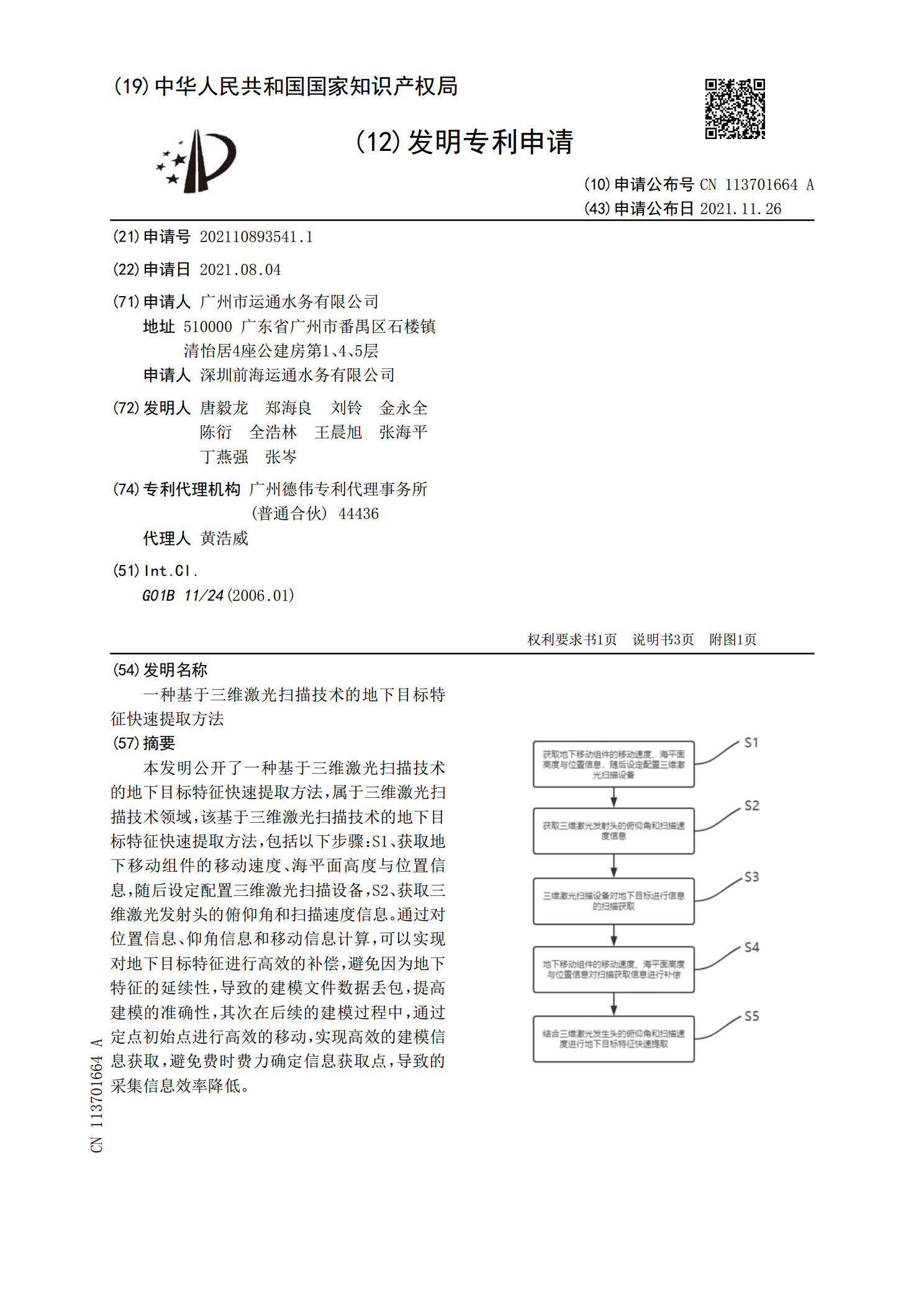
本发明公开了一种基于三维激光扫描技术的地下目标特征快速提取方法,属于三维激光扫描技术领域,该基于三维激光扫描技术的地下目标特征快速提取方法,包括以下步骤:S1、获取地下移动组件的移动速度、海平面高度与位置信息,随后设定配置三维激光扫描设备,S2、获取三维激光发射头的俯仰角和扫描速度信息。通过对位置信息、仰角信息和移动信息计算,可以实现对地下目标特征进行高效的补偿,避免因为地下特征的延续性,导致的建模文件数据丢包,提高建模的准确性,其次在后续的建模过程中,通过定点初始点进行高效的移动,实现高效的建模信息获取

一种基于三维激光扫描技术的快速建模方法.docx
一种基于三维激光扫描技术的快速建模方法基于三维激光扫描技术的快速建模方法摘要:随着科技的快速发展,三维激光扫描技术成为一种高效、精确的建模方法。本文提出了一种基于三维激光扫描技术的快速建模方法。该方法通过使用激光扫描仪对目标物体进行扫描,获取物体的三维点云数据。然后,通过对点云数据进行处理,实现物体的快速建模。实验结果表明,该方法能够快速、准确地建立物体模型,具有很高的应用价值。关键词:三维激光扫描;建模;点云数据;快速建模1.引言快速建模是当今科学研究和工程应用中的一个重要问题。在传统的建模方法中,往往
一种基于三维激光点云的地下建筑物特征提取方法.pdf
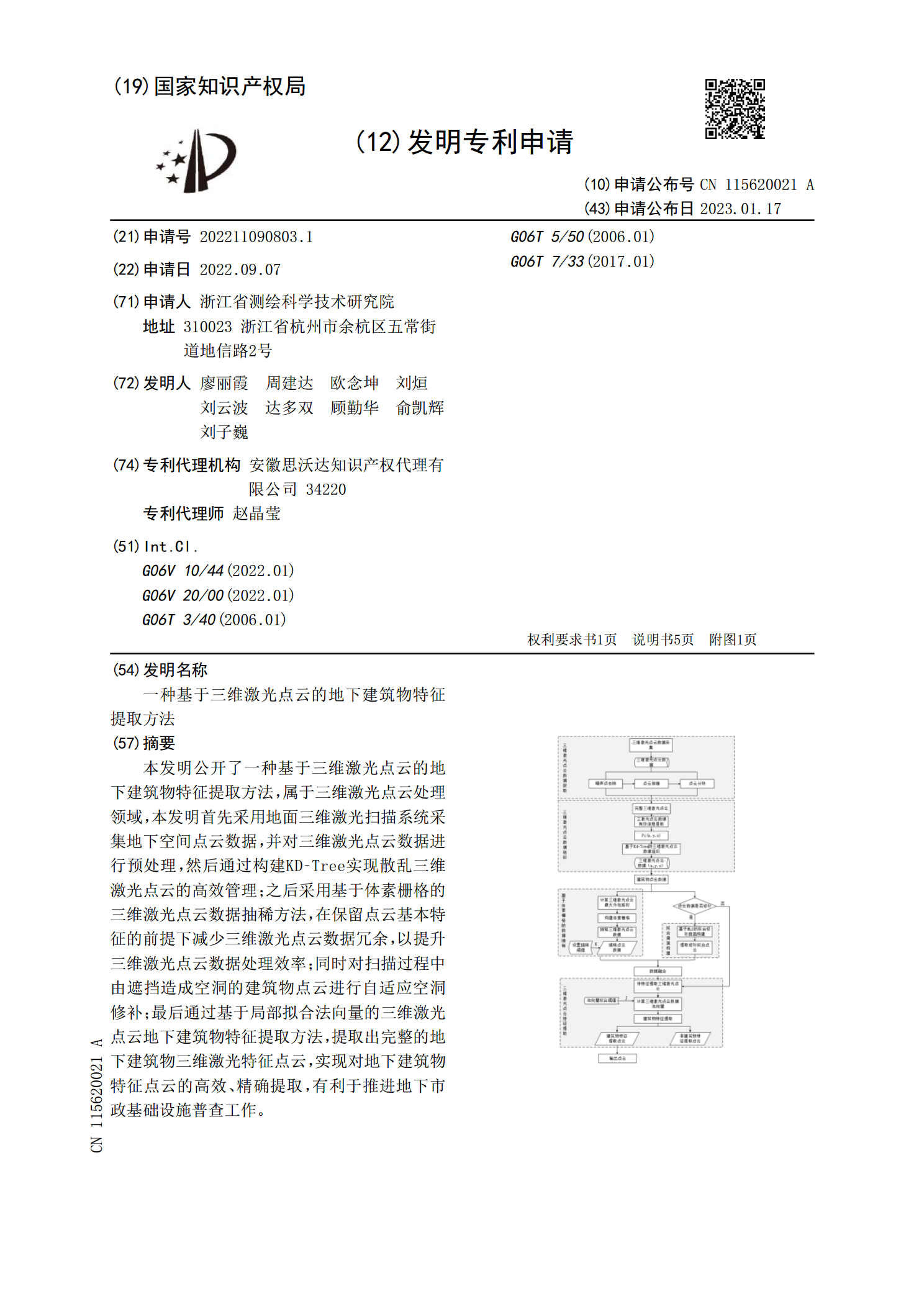
本发明公开了一种基于三维激光点云的地下建筑物特征提取方法,属于三维激光点云处理领域,本发明首先采用地面三维激光扫描系统采集地下空间点云数据,并对三维激光点云数据进行预处理,然后通过构建KD‑Tree实现散乱三维激光点云的高效管理;之后采用基于体素栅格的三维激光点云数据抽稀方法,在保留点云基本特征的前提下减少三维激光点云数据冗余,以提升三维激光点云数据处理效率;同时对扫描过程中由遮挡造成空洞的建筑物点云进行自适应空洞修补;最后通过基于局部拟合法向量的三维激光点云地下建筑物特征提取方法,提取出完整的地下建筑物

基于三维激光扫描的地铁隧道快速监测方法研究.docx
基于三维激光扫描的地铁隧道快速监测方法研究随着城市化进程的加速和人口的不断增长,地铁作为城市重要的交通方式,其建设与运营也变得越来越重要。然而,随着地铁系统建设的不断扩大,地铁隧道的安全问题也逐渐显示出来。因此,地铁隧道的快速监测显得尤为重要。在这篇论文中,我们将介绍一种基于三维激光扫描的地铁隧道快速监测方法。一、研究背景我国的城市化进程和城市建设发展的需要,催生了地铁交通的飞速发展。随着城市地铁线路的增长,地铁运营中的安全问题也日益凸显。其中最重要的一点是地铁隧道的安全问题,包括水雾、排水系统、通风等问

基于三维激光扫描的窄搭接焊特征提取与缺陷识别.docx
基于三维激光扫描的窄搭接焊特征提取与缺陷识别标题:基于三维激光扫描的窄搭接焊特征提取与缺陷识别摘要:随着工业制造的发展,焊接技术在许多行业中得到广泛应用。窄搭接焊是一种常见的焊接方式,其具有较高的强度和耐久性。然而,在窄搭接焊过程中,常常会出现一些不可避免的焊接缺陷,例如焊接裂纹、气孔和间隙等。因此,如何准确地提取窄搭接焊特征并识别焊接缺陷成为一个重要的研究方向。本文提出了一种基于三维激光扫描的窄搭接焊特征提取与缺陷识别方法。首先,使用三维激光扫描仪对窄搭接焊接接头进行扫描,获得焊接接头的三维点云数据。然