
一种三维模型数据动态加载方法.pdf

Ro****44

1/9
2/9

3/9
4/9
5/9

6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种三维模型数据动态加载方法.pdf
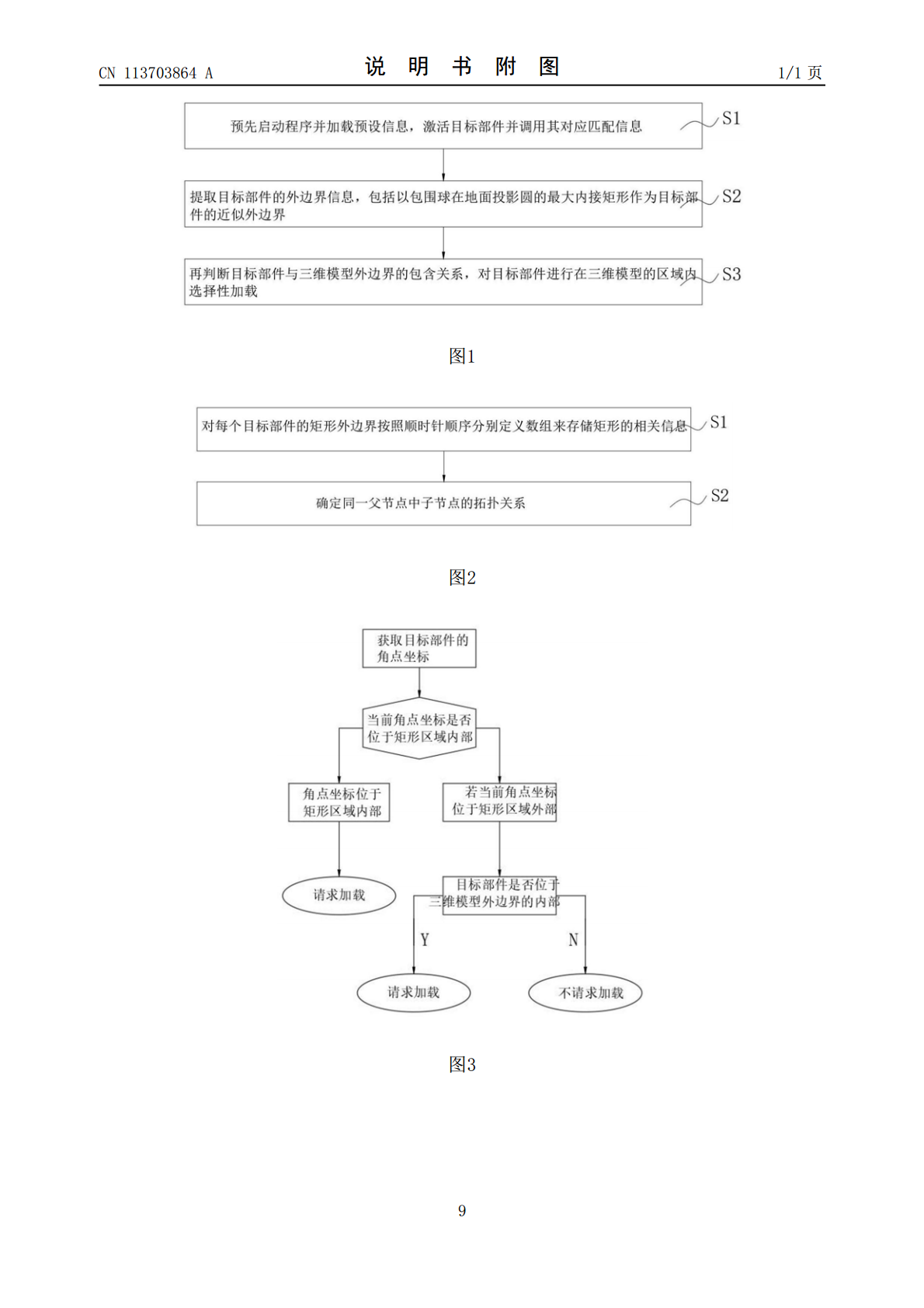
本发明公开了一种三维模型数据动态加载方法,涉及虚拟现实技术领域,包括以下步骤:预先启动程序并加载预设信息,激活目标部件并调用其对应匹配信息;提取目标部件的外边界信息,包括以包围球在地面投影圆的最大内接矩形作为目标部件的近似外边界;再判断目标部件与三维模型外边界的包含关系,对目标部件进行在三维模型的区域内选择性加载。本发明实现三维模型数据加载的优化,减少带宽负荷,响应速度快,其加载项数量明显减少,有效降低数据冗余,提高加载效率,不仅提升工作效率的同时,而且降低了运营成本,解决加载三维模型网络慢、数据交互延时
一种三维模型数据加载方法和装置.pdf
本发明实施例公开了一种三维模型数据加载方法和装置,方法包括:确定终端屏幕显示的地图中心所在的区域块;确定出与地图中心当前所在区域块的距离小于预置的第一距离阈值的目标区域块;提取地图中心当前所在区域块以及所述目标区域块的三维模型数据;将所述三维模型数据中未被加载的三维模型数据加载到所述终端的内存空间,本发明技术方案,加载三维模型数据时,只需加载地图中心所在区域块以及距离地图中心所在区域块较近的部分区域块的三维模型数据,不需要加载所有落入终端屏幕的三维模型的三维模型数据,与现有技术的一次性加载所有落入终端屏幕
一种三维模型的加载方法.pdf
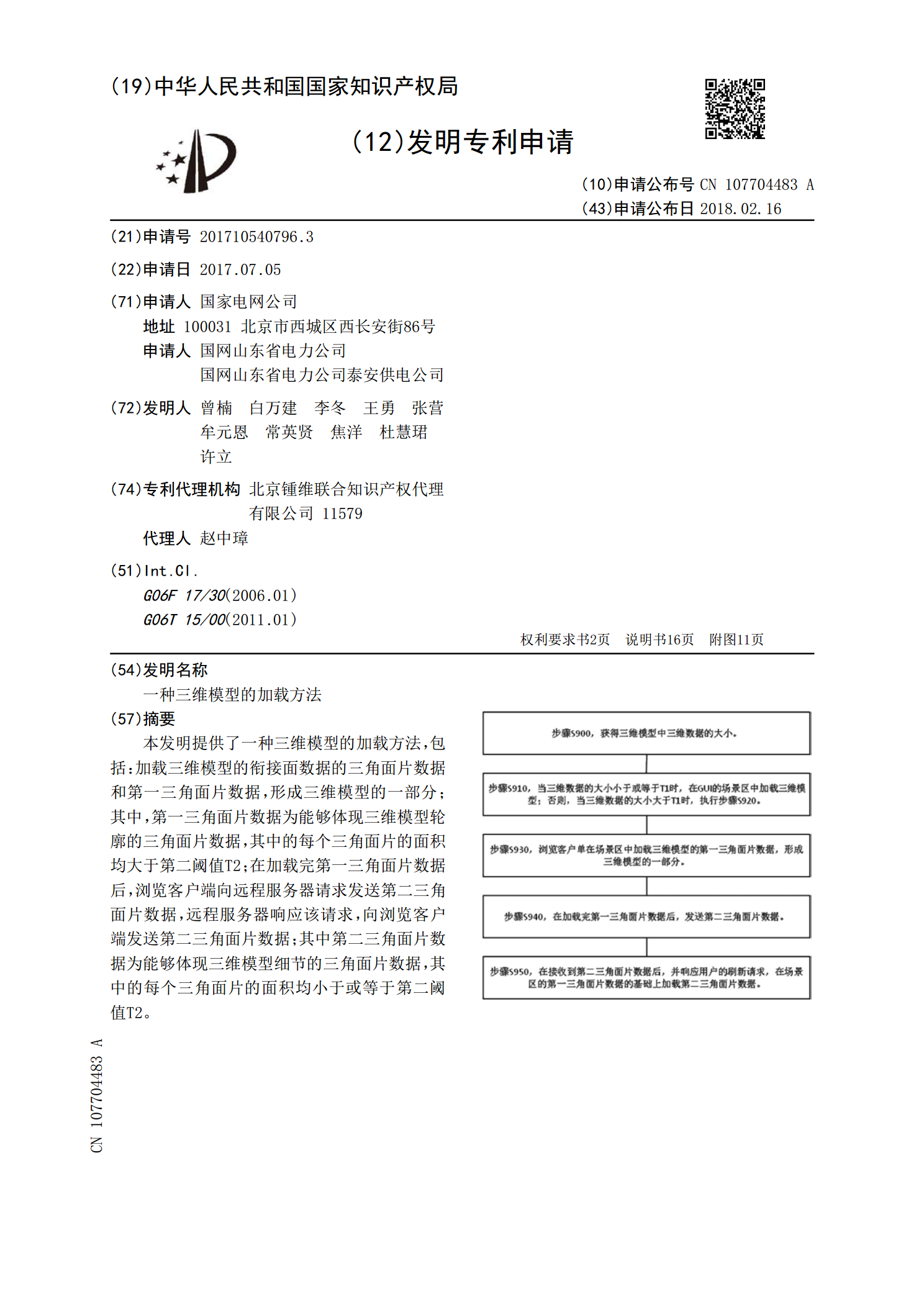
本发明提供了一种三维模型的加载方法,包括:加载三维模型的衔接面数据的三角面片数据和第一三角面片数据,形成三维模型的一部分;其中,第一三角面片数据为能够体现三维模型轮廓的三角面片数据,其中的每个三角面片的面积均大于第二阈值T2;在加载完第一三角面片数据后,浏览客户端向远程服务器请求发送第二三角面片数据,远程服务器响应该请求,向浏览客户端发送第二三角面片数据;其中第二三角面片数据为能够体现三维模型细节的三角面片数据,其中的每个三角面片的面积均小于或等于第二阈值T2。

一种三维模型的加载方法及系统.pdf
本发明涉及三维实景展示领域,公开了一种三维模型的加载方法及系统,通过获取摄像机的视锥体的视场范围;根据所述摄像机视场范围,获取视锥体范围内的三维模型数据;基于摄像机的视锥体对所述三维模型数据进行最终剪切,剔除背面数据;对剪切后的三维模型数据进行渲染,实现了三维模型前端页面的快速加载和渲染,可对大数据量的三维模型进行轻量化加载,降低了系统硬件要求,提升了用户体验。
一种实景三维模型与三维仿真模型混合加载方法.pdf
本发明公开了一种实景三维模型与三维仿真模型混合加载方法,该加载方法包括如下步骤:P1、将三维信息系统中三维实景所在的区域网格化,并对区域内每个网格进行索引,形成索引网格;P2、形成向量坐标数据;P3、形成三维模型区块;P4、为每个三维模型区块设置一个触发区,三维模型区块处于自身对应的触发区内;P5、得到处理后的三维模型数据串;P6、形成关联数据流;P7、将关联数据流传输至智能终端设备,进行解码加载和渲染;P8、形成混合加载模型,通过采用对实景进行建模后区域网格化,结合对仿真模型进行网格划分,保证匹配的精密