
基于自适应STFT方法的微多普勒信号参数估计方法.pdf

睿德****找我


1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于自适应STFT方法的微多普勒信号参数估计方法.pdf
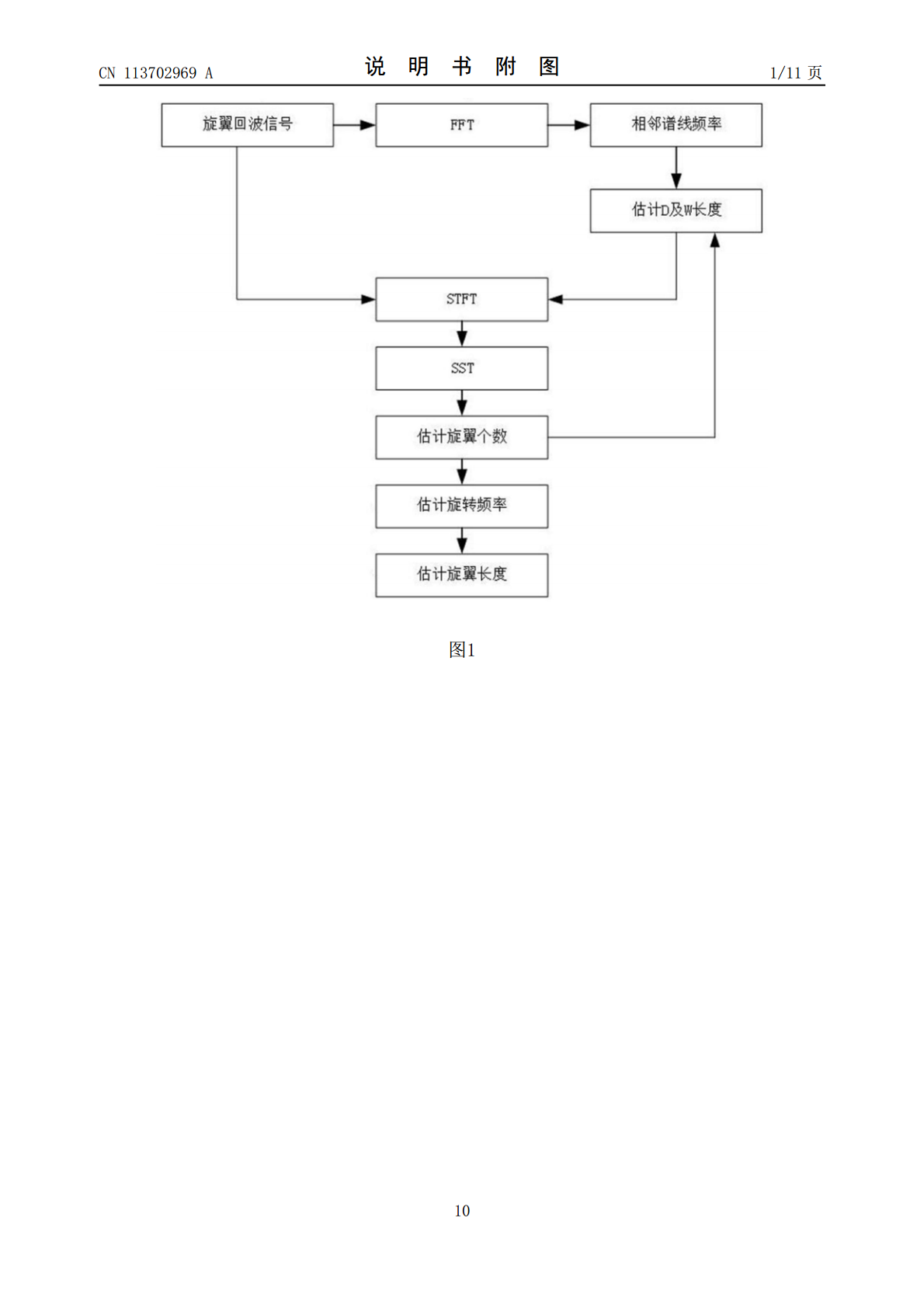
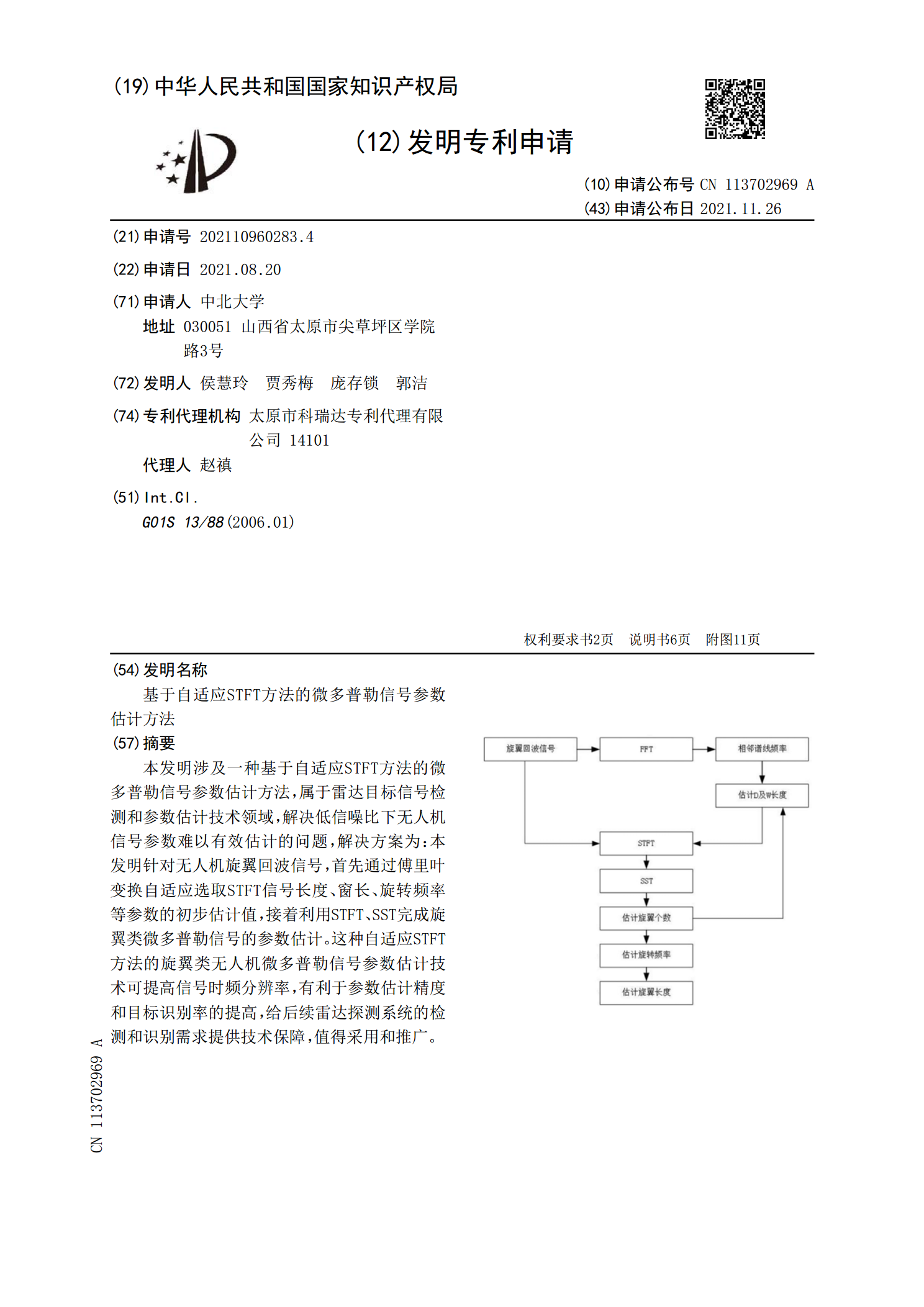
本发明涉及一种基于自适应STFT方法的微多普勒信号参数估计方法,属于雷达目标信号检测和参数估计技术领域,解决低信噪比下无人机信号参数难以有效估计的问题,解决方案为:本发明针对无人机旋翼回波信号,首先通过傅里叶变换自适应选取STFT信号长度、窗长、旋转频率等参数的初步估计值,接着利用STFT、SST完成旋翼类微多普勒信号的参数估计。这种自适应STFT方法的旋翼类无人机微多普勒信号参数估计技术可提高信号时频分辨率,有利于参数估计精度和目标识别率的提高,给后续雷达探测系统的检测和识别需求提供技术保障,值得采用和

脉冲噪声下基于Robust STFT的LFM信号检测与参数估计.docx
脉冲噪声下基于RobustSTFT的LFM信号检测与参数估计在现代通信领域中,低频调频(LFM)信号作为一种重要的调制方式,被广泛应用于雷达、通信等领域。而脉冲噪声作为一种典型的非高斯噪声,有着对基于信号处理的应用带来不小挑战的特点。因此,如何在脉冲噪声环境下准确检测并估计LFM信号参数,成为当前相关领域研究的热点之一。在脉冲噪声环境下,由于噪声和信号的频率范围重合,难以通过常规的滤波器等方法来除噪。RobustSTFT(短时傅里叶变换)方法则是一种可以有效地消除脉冲噪声的方式。该方法将信号分成若干个时间

基于图像质量评估的多普勒参数估计方法.pdf
本发明提出了一种基于图像质量评估的多普勒参数估计方法,能够适用在多种场景和应用背景下,实现理想飞行及飞行不平稳场景中均能正常成像。利用熵值评估图像清晰度,采用二维搜索的方法估计多普勒参数,实现理想飞行及飞行不平稳场景中均能正常成像,解决了多种场景和应用背景下均能成像的问题,具有效率高、场景普适性强的特点。

基于微多普勒频率的进动锥体目标的几何参数估计方法.pdf
本发明公开了一种基于微多普勒频率的进动锥体目标的几何参数估计方法。对圆锥弹头目标进行建模,计算目标在全姿态角下的回波数据;对得到的全姿态角下的回波数据采用插值拟合的方法构造出进动锥体目标的回波电场数值;对回波电场数值进行短时傅里叶变换,得到进动锥体目标的时频分布结果;分别提取进动锥体目标中的时频分布结果中的锥顶时频脊线和锥底时频脊线;通过进动锥体目标的锥顶和锥底微多普勒频率表达式,推导出待估计参数质心到锥顶距离L、质心到锥底中心的距离h、锥底半径r和进动角θ的关系;通过数值关系匹配的方法估计进动角θ、质心

一种卫星导航信号牵引中的多普勒参数估计方法.pdf
本发明公开了一种卫星导航信号牵引中的多普勒参数估计方法。本发明提出了多普勒参数估计分成千赫兹误差、百赫兹误差、几十赫兹误差三个阶段;可快速缩小信号多普勒误差,给信号跟踪提供精确的多普勒估计参数;并可采用复用模式,降低硬件资源消耗。该方法降低了卫星导航信号捕获多普勒误差范围要求,有利于捕获方法向码相位搜索侧重,适用于卫星导航信号长扩频码信号的接收处理。